概念
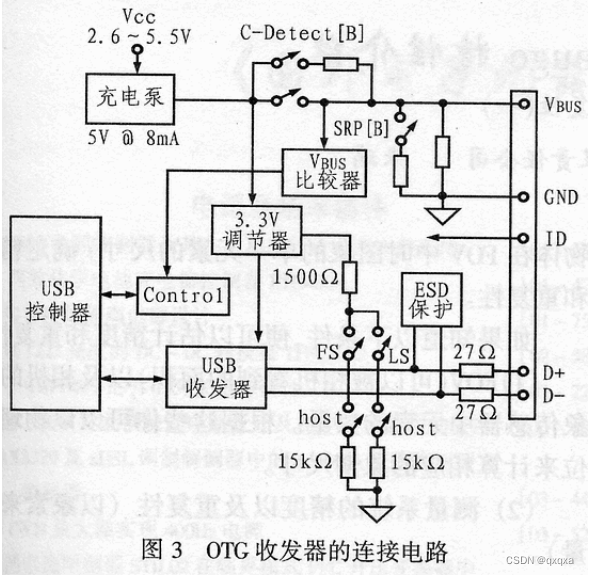
在OTG中,初始主机设备称为A设备,外设称为B设备。可用电缆的连接方式来决定初始角色。两用设备使用新型Mini-AB插座,从而使Mini-A插头、Mini-B插头和Mini-AB插座增添了第5个引脚(ID),以用于识别不同的电缆端点。Mini-A插头中的ID引脚接地,Mini-B插头中的ID引脚浮空。当OTG设备检测到接地的ID引脚时,表示默认的是A设备(主机),而检测到ID引脚浮空的设备则认为是B设备(外设)。系统一旦连接后,OTG的角色还可以更换,以采用新的HNP协议。而SRP允许B设备请求A设备打开VBUS电源并启动一次对话。
设备树
我们直接看支持otg的dwc3是怎么处理otg的,从设备开始看驱动,usb3_0的这个节点一般就是厂商自己定义的,主要包括中断,一般用于vbus检测,usb的插拔情况;dwc3_0这个子节点就是通用的dwc3核心,主要包括中断,一般用于id脚的检测,来判断当前是设备还是主机;如果dr_mode设置了模式,就会用固定的模式去初始化控制器
usb3phy: usb3phy@c0030000 {
compatible = "usb3-phy";
reg = <0xc0030000 0x1000>;
clocks = <&soc_clocks CLK_USB>;
clock-names = "usb_clk";
status = "disabled";
};
usb3_0: usb3-0 {
compatible = "arch,dwc3";
#address-cells = <1>;
#size-cells = <1>;
ranges;
interrupts = <53>;
clocks = <&soc_clocks CLK_USB>;
clock-names = "usb_clk";
status = "disabled";
usb_dwc3_0: dwc31@c0000000 {
compatible = "snps,dwc3";
reg = <0xc0000000 0x11000>;
interrupts = <44>;
usb-phy = <&usb3phy>;
maximum-speed = "super-speed";
dr_mode = "peripheral";
phy_type = "utmi";
lpm-qos = <PM_QOS_CPUIDLE_BLOCK_AXI>;
snps,dis_u3_susphy_quirk;
/* allow-suspend; */
status = "okay";
};
};驱动框架
设备树跟驱动match后,会执行dwc3_probe;主要是一些初始化操作,如果设置了dr_mode为peripheral,就调用dwc_gadget_init去初始化设备控制器;dr_mode为host,就调用dwc3_host_init去初始化为主机控制器;如果dr_mode为otg,就根据id的情况去初始化为主机或设备
dwc3_probe
dwc3_get_dr_mode
dwc3_core_init
dwc3_debugfs_init
dwc3_core_init_mode//根据模式进入一种
dwc3_gadget_init
dwc->gadget.ops = &dwc3_gadget_ops;//初始化设备控制器操作函数
dwc3_gadget_init_endpoints(dwc, dwc->num_eps);
dep->endpoint.ops = &dwc3_gadget_ep_ops;
usb_add_gadget_udc(dwc->dev, &dwc->gadget);//注册设备控制器
dwc3_host_init
xhci = platform_device_alloc("xhci-hcd", PLATFORM_DEVID_AUTO);
platform_device_add(xhci)//初始化xhci平台设备;用于匹配到usb_xhci_driver-----其probe来初始化主机控制器,填充操作函数xhci_hc_driver,并注册主机控制器
dwc3_drd_init
request_threaded_irq(dwc->otg_irq, dwc3_otg_irq,dwc3_otg_thread_irq,IRQF_SHARED, "dwc3-otg", dwc);
dwc3_set_mode
__dwc3_set_mode
dwc3_otg_update//根据模式进入一种
dwc3_host_init
dwc3_gadget_init主机控制器的初始化
上面的代码分析到:dwc3_host_init会通过 platform_device_add(xhci)//初始化xhci平台设备;用于匹配到usb_xhci_driver-----其probe来初始化主机控制器,填充操作函数xhci_hc_driver,并注册主机控制器
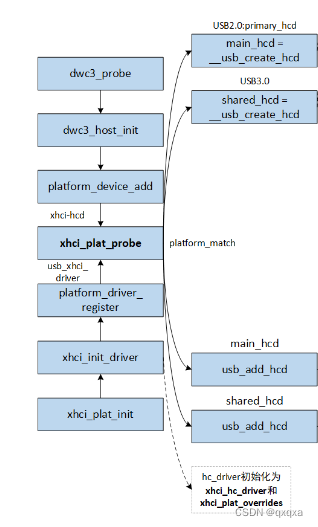
drivers/usb/host/xhci-plat.c中的usb_xhci_driver通过name(xhci-hcd)匹配上;xhci_init_driver将通用的xhci_hc_driver,赋值给xhci_plat_hc_driver;过程跟ehci_init_driver一致
static int xhci_plat_probe(struct platform_device *pdev)
{
const struct xhci_plat_priv *priv_match;
const struct hc_driver *driver;
struct device *sysdev, *tmpdev;
struct xhci_hcd *xhci;
struct resource *res;
struct usb_hcd *hcd;
int ret;
int irq;
struct xhci_plat_priv *priv = NULL;
if (usb_disabled())
return -ENODEV;
driver = &xhci_plat_hc_driver;
irq = platform_get_irq(pdev, 0);
if (irq < 0)
return irq;
/*
* sysdev must point to a device that is known to the system firmware
* or PCI hardware. We handle these three cases here:
* 1. xhci_plat comes from firmware
* 2. xhci_plat is child of a device from firmware (dwc3-plat)
* 3. xhci_plat is grandchild of a pci device (dwc3-pci)
*/
for (sysdev = &pdev->dev; sysdev; sysdev = sysdev->parent) {
if (is_of_node(sysdev->fwnode) ||
is_acpi_device_node(sysdev->fwnode))
break;
#ifdef CONFIG_PCI
else if (sysdev->bus == &pci_bus_type)
break;
#endif
}
if (!sysdev)
sysdev = &pdev->dev;
/* Try to set 64-bit DMA first */
if (WARN_ON(!sysdev->dma_mask))
/* Platform did not initialize dma_mask */
ret = dma_coerce_mask_and_coherent(sysdev,
DMA_BIT_MASK(64));
else
ret = dma_set_mask_and_coherent(sysdev, DMA_BIT_MASK(64));
/* If seting 64-bit DMA mask fails, fall back to 32-bit DMA mask */
if (ret) {
ret = dma_set_mask_and_coherent(sysdev, DMA_BIT_MASK(32));
if (ret)
return ret;
}
pm_runtime_set_active(&pdev->dev);
pm_runtime_enable(&pdev->dev);
pm_runtime_get_noresume(&pdev->dev);
hcd = __usb_create_hcd(driver, sysdev, &pdev->dev,
dev_name(&pdev->dev), NULL);
if (!hcd) {
ret = -ENOMEM;
goto disable_runtime;
}
res = platform_get_resource(pdev, IORESOURCE_MEM, 0);
hcd->regs = devm_ioremap_resource(&pdev->dev, res);
if (IS_ERR(hcd->regs)) {
ret = PTR_ERR(hcd->regs);
goto put_hcd;
}
hcd->rsrc_start = res->start;
hcd->rsrc_len = resource_size(res);
xhci = hcd_to_xhci(hcd);
/*
* Not all platforms have clks so it is not an error if the
* clock do not exist.
*/
xhci->reg_clk = devm_clk_get_optional(&pdev->dev, "reg");
if (IS_ERR(xhci->reg_clk)) {
ret = PTR_ERR(xhci->reg_clk);
goto put_hcd;
}
ret = clk_prepare_enable(xhci->reg_clk);
if (ret)
goto put_hcd;
xhci->clk = devm_clk_get_optional(&pdev->dev, NULL);
if (IS_ERR(xhci->clk)) {
ret = PTR_ERR(xhci->clk);
goto disable_reg_clk;
}
ret = clk_prepare_enable(xhci->clk);
if (ret)
goto disable_reg_clk;
priv_match = of_device_get_match_data(&pdev->dev);
if (priv_match) {
priv = hcd_to_xhci_priv(hcd);
/* Just copy data for now */
if (priv_match)
*priv = *priv_match;
}
device_wakeup_enable(hcd->self.controller);
xhci->main_hcd = hcd;
xhci->shared_hcd = __usb_create_hcd(driver, sysdev, &pdev->dev,
dev_name(&pdev->dev), hcd);
if (!xhci->shared_hcd) {
ret = -ENOMEM;
goto disable_clk;
}
/* imod_interval is the interrupt moderation value in nanoseconds. */
xhci->imod_interval = 40000;
/* Iterate over all parent nodes for finding quirks */
for (tmpdev = &pdev->dev; tmpdev; tmpdev = tmpdev->parent) {
if (device_property_read_bool(tmpdev, "usb2-lpm-disable"))
xhci->quirks |= XHCI_HW_LPM_DISABLE;
if (device_property_read_bool(tmpdev, "usb3-lpm-capable"))
xhci->quirks |= XHCI_LPM_SUPPORT;
if (device_property_read_bool(tmpdev, "quirk-broken-port-ped"))
xhci->quirks |= XHCI_BROKEN_PORT_PED;
device_property_read_u32(tmpdev, "imod-interval-ns",
&xhci->imod_interval);
}
hcd->usb_phy = devm_usb_get_phy_by_phandle(sysdev, "usb-phy", 0);
if (IS_ERR(hcd->usb_phy)) {
ret = PTR_ERR(hcd->usb_phy);
if (ret == -EPROBE_DEFER)
goto put_usb3_hcd;
hcd->usb_phy = NULL;
} else {
ret = usb_phy_init(hcd->usb_phy);
if (ret)
goto put_usb3_hcd;
}
hcd->tpl_support = of_usb_host_tpl_support(sysdev->of_node);
xhci->shared_hcd->tpl_support = hcd->tpl_support;
if (priv) {
ret = xhci_priv_plat_setup(hcd);
if (ret)
goto disable_usb_phy;
}
if ((xhci->quirks & XHCI_SKIP_PHY_INIT) || (priv && (priv->quirks & XHCI_SKIP_PHY_INIT)))
hcd->skip_phy_initialization = 1;
ret = usb_add_hcd(hcd, irq, IRQF_SHARED);
if (ret)
goto disable_usb_phy;
if (HCC_MAX_PSA(xhci->hcc_params) >= 4)
xhci->shared_hcd->can_do_streams = 1;
ret = usb_add_hcd(xhci->shared_hcd, irq, IRQF_SHARED);
if (ret)
goto dealloc_usb2_hcd;
device_enable_async_suspend(&pdev->dev);
pm_runtime_put_noidle(&pdev->dev);
/*
* Prevent runtime pm from being on as default, users should enable
* runtime pm using power/control in sysfs.
*/
pm_runtime_forbid(&pdev->dev);
return 0;
....
}
static struct platform_driver usb_xhci_driver = {
.probe = xhci_plat_probe,
.remove = xhci_plat_remove,
.shutdown = usb_hcd_platform_shutdown,
.driver = {
.name = "xhci-hcd",
.pm = &xhci_plat_pm_ops,
.of_match_table = of_match_ptr(usb_xhci_of_match),
.acpi_match_table = ACPI_PTR(usb_xhci_acpi_match),
},
};
MODULE_ALIAS("platform:xhci-hcd");
static int __init xhci_plat_init(void)
{
xhci_init_driver(&xhci_plat_hc_driver, &xhci_plat_overrides);
return platform_driver_register(&usb_xhci_driver);
}
module_init(xhci_plat_init);
static void __exit xhci_plat_exit(void)
{
platform_driver_unregister(&usb_xhci_driver);
}
module_exit(xhci_plat_exit);dwc3_core_init_mode
dwc3_core_init_mode根据设备树获得的模式,初始化控制器为对应模式,初始化控制器的操作函数:主机有主机的操作函数;设备有设备的操作函数
static int dwc3_core_init_mode(struct dwc3 *dwc)
{
struct device *dev = dwc->dev;
int ret;
switch (dwc->dr_mode) {
case USB_DR_MODE_PERIPHERAL:
dwc3_set_prtcap(dwc, DWC3_GCTL_PRTCAP_DEVICE);
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, false);
phy_set_mode(dwc->usb2_generic_phy, PHY_MODE_USB_DEVICE);
phy_set_mode(dwc->usb3_generic_phy, PHY_MODE_USB_DEVICE);
ret = dwc3_gadget_init(dwc);
if (ret) {
if (ret != -EPROBE_DEFER)
dev_err(dev, "failed to initialize gadget\n");
return ret;
}
break;
case USB_DR_MODE_HOST:
dwc3_set_prtcap(dwc, DWC3_GCTL_PRTCAP_HOST);
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, true);
phy_set_mode(dwc->usb2_generic_phy, PHY_MODE_USB_HOST);
phy_set_mode(dwc->usb3_generic_phy, PHY_MODE_USB_HOST);
ret = dwc3_host_init(dwc);
if (ret) {
if (ret != -EPROBE_DEFER)
dev_err(dev, "failed to initialize host\n");
return ret;
}
break;
case USB_DR_MODE_OTG:
INIT_WORK(&dwc->drd_work, __dwc3_set_mode);
ret = dwc3_drd_init(dwc);
if (ret) {
if (ret != -EPROBE_DEFER)
dev_err(dev, "failed to initialize dual-role\n");
return ret;
}
break;
default:
dev_err(dev, "Unsupported mode of operation %d\n", dwc->dr_mode);
return -EINVAL;
}
return 0;
}OTG模式
注册中断
一般是通过id脚注册中断:use OTG block to get ID event
int dwc3_drd_init(struct dwc3 *dwc)
{
int ret, irq;
dwc->edev = dwc3_get_extcon(dwc);
if (IS_ERR(dwc->edev))
return PTR_ERR(dwc->edev);
if (ROLE_SWITCH &&
device_property_read_bool(dwc->dev, "usb-role-switch")) {
ret = dwc3_setup_role_switch(dwc);
if (ret < 0)
return ret;
} else if (dwc->edev) {
dwc->edev_nb.notifier_call = dwc3_drd_notifier;
ret = extcon_register_notifier(dwc->edev, EXTCON_USB_HOST,
&dwc->edev_nb);
if (ret < 0) {
dev_err(dwc->dev, "couldn't register cable notifier\n");
return ret;
}
dwc3_drd_update(dwc);
} else {
dwc3_set_prtcap(dwc, DWC3_GCTL_PRTCAP_OTG);
dwc->current_dr_role = DWC3_GCTL_PRTCAP_OTG;
/* use OTG block to get ID event */
irq = dwc3_otg_get_irq(dwc);
if (irq < 0)
return irq;
dwc->otg_irq = irq;
/* disable all OTG IRQs */
dwc3_otg_disable_events(dwc, DWC3_OTG_ALL_EVENTS);
/* clear all events */
dwc3_otg_clear_events(dwc);
ret = request_threaded_irq(dwc->otg_irq, dwc3_otg_irq,
dwc3_otg_thread_irq,
IRQF_SHARED, "dwc3-otg", dwc);
if (ret) {
dev_err(dwc->dev, "failed to request irq #%d --> %d\n",
dwc->otg_irq, ret);
ret = -ENODEV;
return ret;
}
dwc3_otg_init(dwc);
dwc3_set_mode(dwc, DWC3_GCTL_PRTCAP_OTG);
}
return 0;
}中断处理
根据id脚的状态,判断是做主机还是设备
static irqreturn_t dwc3_otg_irq(int irq, void *_dwc)
{
u32 reg;
struct dwc3 *dwc = _dwc;
irqreturn_t ret = IRQ_NONE;
reg = dwc3_readl(dwc->regs, DWC3_OEVT);
if (reg) {
/* ignore non OTG events, we can't disable them in OEVTEN */
if (!(reg & DWC3_OTG_ALL_EVENTS)) {
dwc3_writel(dwc->regs, DWC3_OEVT, reg);
return IRQ_NONE;
}
if (dwc->current_otg_role == DWC3_OTG_ROLE_HOST &&
!(reg & DWC3_OEVT_DEVICEMODE))
dwc->otg_restart_host = 1;
dwc3_writel(dwc->regs, DWC3_OEVT, reg);
ret = IRQ_WAKE_THREAD;
}
return ret;
}可以看作中断下半部,来通过dwc3_set_mode将控制器初始化为主机或者设备
static irqreturn_t dwc3_otg_thread_irq(int irq, void *_dwc)
{
struct dwc3 *dwc = _dwc;
spin_lock(&dwc->lock);
if (dwc->otg_restart_host) {
dwc3_otg_host_init(dwc);
dwc->otg_restart_host = 0;
}
spin_unlock(&dwc->lock);
dwc3_set_mode(dwc, DWC3_GCTL_PRTCAP_OTG);
return IRQ_HANDLED;
}
void dwc3_set_mode(struct dwc3 *dwc, u32 mode)
{
unsigned long flags;
spin_lock_irqsave(&dwc->lock, flags);
dwc->desired_dr_role = mode;
spin_unlock_irqrestore(&dwc->lock, flags);
queue_work(system_freezable_wq, &dwc->drd_work);
}设置模式
模式设置的是设备或者主机,就直接调用dwc3_gadget_init或者dwc3_host_init初始化控制器;如果是otg模式,就要根据dwc3_otg_update去判断id脚的情况来更新为设备或者主机
static void __dwc3_set_mode(struct work_struct *work)
{
struct dwc3 *dwc = work_to_dwc(work);
unsigned long flags;
int ret;
u32 reg;
if (dwc->dr_mode != USB_DR_MODE_OTG)
return;
if (dwc->current_dr_role == DWC3_GCTL_PRTCAP_OTG)
dwc3_otg_update(dwc, 0);
if (!dwc->desired_dr_role)
return;
if (dwc->desired_dr_role == dwc->current_dr_role)
return;
if (dwc->desired_dr_role == DWC3_GCTL_PRTCAP_OTG && dwc->edev)
return;
switch (dwc->current_dr_role) {
case DWC3_GCTL_PRTCAP_HOST:
dwc3_host_exit(dwc);
break;
case DWC3_GCTL_PRTCAP_DEVICE:
dwc3_gadget_exit(dwc);
dwc3_event_buffers_cleanup(dwc);
break;
case DWC3_GCTL_PRTCAP_OTG:
dwc3_otg_exit(dwc);
spin_lock_irqsave(&dwc->lock, flags);
dwc->desired_otg_role = DWC3_OTG_ROLE_IDLE;
spin_unlock_irqrestore(&dwc->lock, flags);
dwc3_otg_update(dwc, 1);
break;
default:
break;
}
spin_lock_irqsave(&dwc->lock, flags);
dwc3_set_prtcap(dwc, dwc->desired_dr_role);
spin_unlock_irqrestore(&dwc->lock, flags);
switch (dwc->desired_dr_role) {
case DWC3_GCTL_PRTCAP_HOST:
ret = dwc3_host_init(dwc);
if (ret) {
dev_err(dwc->dev, "failed to initialize host\n");
} else {
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, true);
phy_set_mode(dwc->usb2_generic_phy, PHY_MODE_USB_HOST);
phy_set_mode(dwc->usb3_generic_phy, PHY_MODE_USB_HOST);
if (dwc->dis_split_quirk) {
reg = dwc3_readl(dwc->regs, DWC3_GUCTL3);
reg |= DWC3_GUCTL3_SPLITDISABLE;
dwc3_writel(dwc->regs, DWC3_GUCTL3, reg);
dwc3_save_controller_regs(DWC3_GUCTL3, reg);
}
}
break;
case DWC3_GCTL_PRTCAP_DEVICE:
dwc3_event_buffers_setup(dwc);
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, false);
phy_set_mode(dwc->usb2_generic_phy, PHY_MODE_USB_DEVICE);
phy_set_mode(dwc->usb3_generic_phy, PHY_MODE_USB_DEVICE);
ret = dwc3_gadget_init(dwc);
if (ret)
dev_err(dwc->dev, "failed to initialize peripheral\n");
break;
case DWC3_GCTL_PRTCAP_OTG:
dwc3_otg_init(dwc);
dwc3_otg_update(dwc, 0);
break;
default:
break;
}
}更新模式
ignore_idstatus为0,就回去读id相关寄存器,获取id脚的状态desired_otg_role;为高就是DWC3_OTG_ROLE_DEVICE,为低就是DWC3_OTG_ROLE_HOST;跟current_otg_role一样就返回,不一样就关掉当前的控制器,初始化为desired_otg_role的控制器模式
void dwc3_otg_update(struct dwc3 *dwc, bool ignore_idstatus)
{
int ret;
u32 reg;
int id;
unsigned long flags;
if (dwc->dr_mode != USB_DR_MODE_OTG)
return;
/* don't do anything if debug user changed role to not OTG */
if (dwc->current_dr_role != DWC3_GCTL_PRTCAP_OTG)
return;
if (!ignore_idstatus) {
reg = dwc3_readl(dwc->regs, DWC3_OSTS);
id = !!(reg & DWC3_OSTS_CONIDSTS);
dwc->desired_otg_role = id ? DWC3_OTG_ROLE_DEVICE :
DWC3_OTG_ROLE_HOST;
}
if (dwc->desired_otg_role == dwc->current_otg_role)
return;
switch (dwc->current_otg_role) {
case DWC3_OTG_ROLE_HOST:
dwc3_host_exit(dwc);
spin_lock_irqsave(&dwc->lock, flags);
dwc3_otg_host_exit(dwc);
spin_unlock_irqrestore(&dwc->lock, flags);
break;
case DWC3_OTG_ROLE_DEVICE:
dwc3_gadget_exit(dwc);
spin_lock_irqsave(&dwc->lock, flags);
dwc3_event_buffers_cleanup(dwc);
dwc3_otg_device_exit(dwc);
spin_unlock_irqrestore(&dwc->lock, flags);
break;
default:
break;
}
spin_lock_irqsave(&dwc->lock, flags);
dwc->current_otg_role = dwc->desired_otg_role;
spin_unlock_irqrestore(&dwc->lock, flags);
switch (dwc->desired_otg_role) {
case DWC3_OTG_ROLE_HOST:
spin_lock_irqsave(&dwc->lock, flags);
dwc3_otgregs_init(dwc);
dwc3_otg_host_init(dwc);
spin_unlock_irqrestore(&dwc->lock, flags);
ret = dwc3_host_init(dwc);
if (ret) {
dev_err(dwc->dev, "failed to initialize host\n");
} else {
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, true);
if (dwc->usb2_generic_phy)
phy_set_mode(dwc->usb2_generic_phy,
PHY_MODE_USB_HOST);
}
break;
case DWC3_OTG_ROLE_DEVICE:
spin_lock_irqsave(&dwc->lock, flags);
dwc3_otgregs_init(dwc);
dwc3_otg_device_init(dwc);
dwc3_event_buffers_setup(dwc);
spin_unlock_irqrestore(&dwc->lock, flags);
if (dwc->usb2_phy)
otg_set_vbus(dwc->usb2_phy->otg, false);
if (dwc->usb2_generic_phy)
phy_set_mode(dwc->usb2_generic_phy,
PHY_MODE_USB_DEVICE);
ret = dwc3_gadget_init(dwc);
if (ret)
dev_err(dwc->dev, "failed to initialize peripheral\n");
break;
default:
break;
}
}debugfs
drivers/usb/dwc3/debugfs.c通过应用层写模式到属性文件中,也能直接切换模式
static ssize_t dwc3_mode_write(struct file *file,
const char __user *ubuf, size_t count, loff_t *ppos)
{
struct seq_file *s = file->private_data;
struct dwc3 *dwc = s->private;
u32 mode = 0;
char buf[32];
if (copy_from_user(&buf, ubuf, min_t(size_t, sizeof(buf) - 1, count)))
return -EFAULT;
if (!strncmp(buf, "host", 4))
mode = DWC3_GCTL_PRTCAP_HOST;
if (!strncmp(buf, "device", 6))
mode = DWC3_GCTL_PRTCAP_DEVICE;
if (!strncmp(buf, "otg", 3))
mode = DWC3_GCTL_PRTCAP_OTG;
dwc3_set_mode(dwc, mode);
return count;
}