一:功能概述
1.1、功能简介
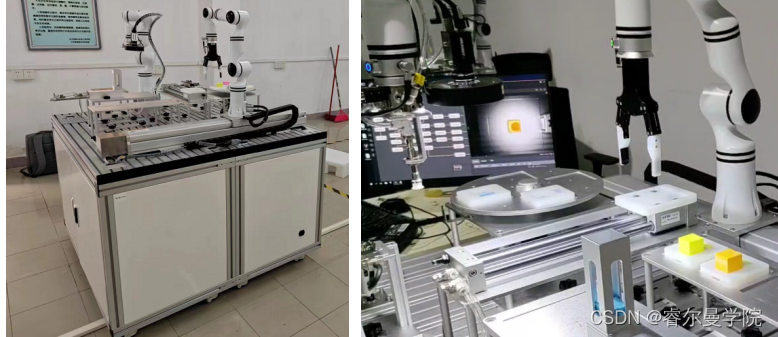
机器人视觉教学实训平台基于睿尔曼机器人与海康机器视觉产品,面向机器人视觉系统应用而开发设计,产品涵盖机器人系统、工业视觉系统、自动化控制系统、计算机编程系统,可以在一台设备上进行多种与机器人应用技术相关的学习和实训,平台结构紧凑、拆卸方便,便于应用,支持二次开发应用设计,是一个综合性较强的机器人视觉系统实训设备。机器人视觉技术实训平台包括RM65-B机器人、海康相机、机器人导轨、平面仓库、旋转仓库、快换工具以及多种类型的末端执行器。平台以模块化设计为思想,以安全、实用为原则,充分考虑教学实训的实际需求,既能够保证学生学习过程的安全,又能够充分学习机器人在工业生产中的主要技术应用。其能开展图像和视频采集、数据处理和分析、算法开发和调试、训练和优化模型、模型部署和实时预测、可视化和结果展示等实训课程,帮助学生由浅入深理解机器人视觉如何在产线上应用。
1.2、产品应用案例
机器人视觉教学实训平台主要作为教育类产品使用,该平台安全等级高,具有碰撞即停的功能,同时具有易操作的特点,可以通过图形化编程的方式完成实训流程。该产品配套完整的实训指导书,用户参考相关内容及任务可由浅入深,循序渐进的熟悉整套产品的使用。可用于中高职院校机器人相关专业的实训课程、少儿机器人编程兴趣培养及工业园区产业基地人才培养等。

实训室建设
1.3、产品特点
1.3.1、产品背景
2023年1月《“机器人+”应用行动实施方案》指出,当前,机器人产业蓬勃发展,正极大改变着人类生产和生活方式,为经济社会发展注入强劲动能。预计到2025年,制造业机器人密度较2020年实现翻番,服务机器人、特种机器人行业应用深度和广度显著提升,机器人促进经济社会高质量发展的能力明显增强。
政策聚焦制造业、农业、建筑、能源、商贸物流、医疗健康、养老服务、教育、商业社区服务和安全应急和极限环境应用10大重点领域,突破100种以上机器人创新应用技术及解决方案,推广200个以上具有较高技术水平、创新应用模式和显著应用成效的机器人典型应用场景,建设一批应用体验中心和试验验证中心。推动各行业、各地方结合行业发展阶段和区域发展特色,开展“机器人+”应用创新实践。搭建国际国内交流平台,形成全面推进机器人应用的浓厚氛围。
为强化“机器人+”应用组织保障,国家大力提倡培养引进机器人应用高端研发人才和标准化人才,加强人才国际交流,打造领军人才和创新团队。鼓励机器人企业、用户单位与普通高等院校、科研院所、职业院校等合作,共建人才实习实训基地,联合开展机器人应用人才培养,提供更多就业渠道。组织细分行业机器人应用技能竞赛,发现和培养更多机器人高素质技术技能人才。
1.3.2、产品优势
- 高度安全性:①具有灵敏的碰撞监测功能,工作中一旦与人发生碰撞,便会立刻自动停止,无需安装防护栏,在保障人身安全的前提下,实现人与机器人的协同作业。②机器人示教器含有三维仿真界面,可以实时观察机器人运动状态,也可以在通过仿真模式将以编写好的机器人程序进行试运行,防止机器人新程序中含有误差较大的路点,造成撞击危险。③机械臂支持虚拟光栅设定,人工设定机器人的工作区域,避免机器人在工作范围外产生碰撞。
- 高精度、高灵敏度:机器人的重复定位精度可达±0.05mm,适用于各种自动化中对精度有高度要求的工作。轻质量小型化的身材,面对不同的应用场景,也能快速部署和设置。
- 模块化:机器人的额定使用寿命为30000小时,即便是在工作超负荷,环境恶劣的情况下,也可正常运行,模块化的设计理念,让机器人的维修与保养更加快速与便捷。实训平台的安装平台、作业模块以及外设安装都采用模块化安装,既方便实训台实训功能的切换,又方便设备的组装及移动。
- 简单易操作:用户可直接通过手动拖拽来设置机器人的运行轨迹。可视化的图形操作界面,示教编程时指令参数均可通过下拉选项进行设定,让非机器人专业用户也能快速掌握。
- 通讯接口丰富:平台既包含了目前较为主流的机器人视觉应用,同时也包含了工业机器人搬运、轨迹示教等常用工艺。在通讯方面,平台集成了IO通信、以太网、RS485、WIFI等多种通讯接口,使工业相机、机器人以及手爪等设备与控制器相连接,便于技术人员熟悉了解多种工业机器人应用方式的配置和操作,有助于提高技术人员综合实践能力。
- 智能与开放:系统提供多种形式的应用编程接口,API、ROS机器人操作系统等,便于用户二次开发。同时可集成视觉,快速拓展行业应用。
1.4、配套资源
1.4.1课程资源
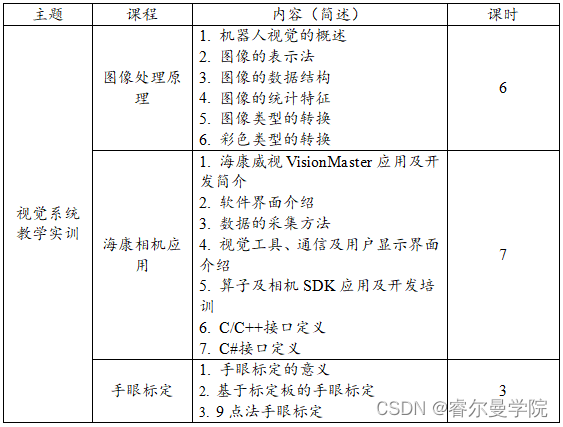
机器人视觉教学实训平台将机器人常用的搬运、分拣、码垛、自动出入库场景集成于平台之上,针对该产品可配套以下教学课程:

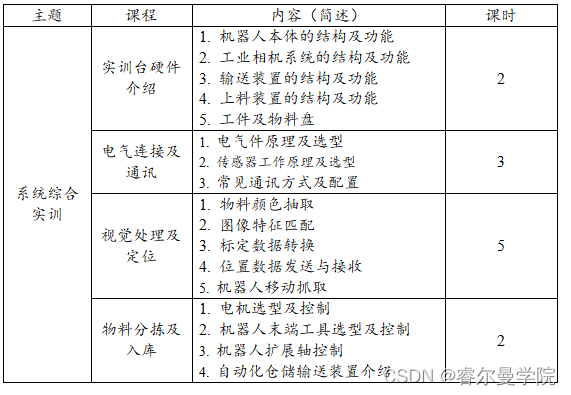
1.4.2可开展实训内容
- 机械臂在线编程及轨迹示教;
- 机械臂二次开放应用编程;
- 工业相机标定;
- 视觉颜色识别、形状识别、字符识别;
- 视觉引导机械臂定位抓取;
- 供料单元、托盘库、机械夹爪、真空吸盘等气路连接与调试:
- 光电、光纤等检测传感器的连接与调试
- 电机运动控制
- 机械臂码垛场景应用实训
- 机械结构设计
- 机器人二次开发:通过机器人各部分API接口、开放外部接口与ROS开源功能包适配各类外部器件,完成指定场景应用与特定功能实现;
1.4.3教学资源与平台
机器人视觉教学实训平台提供由浅入深的二次开发教学资源以及开发平台,用户可在官网论坛查找相关产品资料,并且开发人员会在论坛中分享二次开发示例源码、开发原理及经验,为用户提供二次开发的技术帮助。
1.5、设备组成
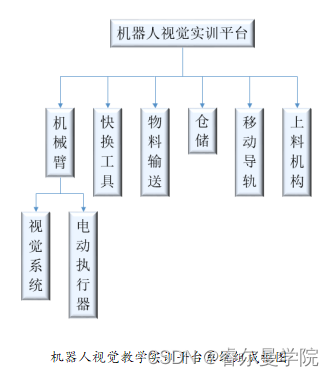
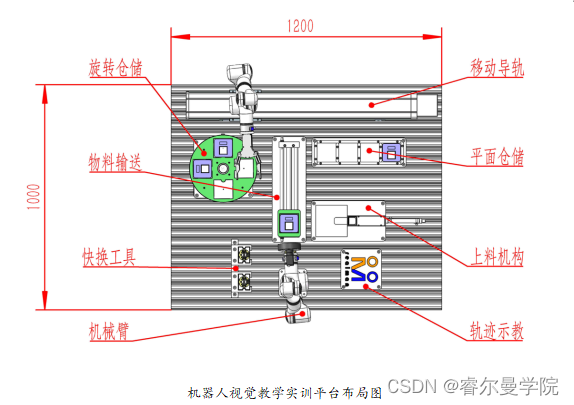
实训台主要由以下几个系统组成:
机械臂:平台上安装有两台RM65-B机械臂。一台固定安装并配有工业相机,用以物料识别与定位。一台安装在移动导轨之上,用来进行产品托盘的出入库。
快换工具:快换工具用于机械臂末端工具的自动切换,包括:机器人侧和工具侧,机器人侧用来安装在机器人末端法兰上,工具侧用来安装在末端执行工具上。末端工具包含一套吸盘工具、一套激光笔。
物料输送:物料输送模块采用一个无杆气缸,用来输送物料托盘。
仓储:仓储包括一套旋转仓储、一套平面仓储,旋转仓储用来储存空托盘,平面仓储用来储存满托盘。
移动导轨:移动导轨用来增加机械臂工作空间。
上料机构:该部分负责物料的自动上料,供机械臂进行识别抓取。
轨迹示教:轨迹示教模块用作机械臂的基础运动控制Move指令的练习,以及示教器操作。
1.6、主要技术参数
(1)整机尺寸:≥1200mm*1000mm*800mm
(2)整机容量:≤2KVA
(3)适用电源:220VAC±10%(50Hz)
(4)气源压力:0.4~0.6Mpa
(5)安全保护:具有接地、漏电压、漏电流保护,安全指标符合国家标准。
(6)工作台材质:铝型材拼装结构
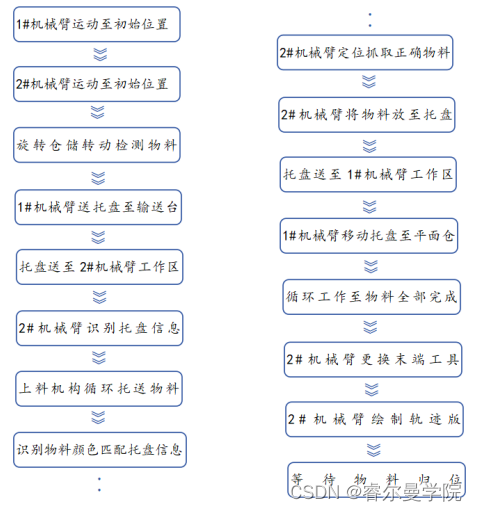
1.7、工作流程
二、主要配置介绍
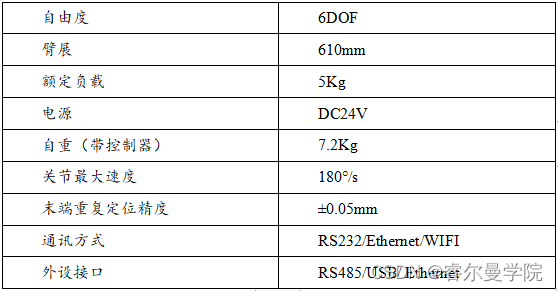
2.1、机械臂本体
机械臂本体为睿尔曼标准6轴RM-65机械臂,见下图,具体参数见下表。

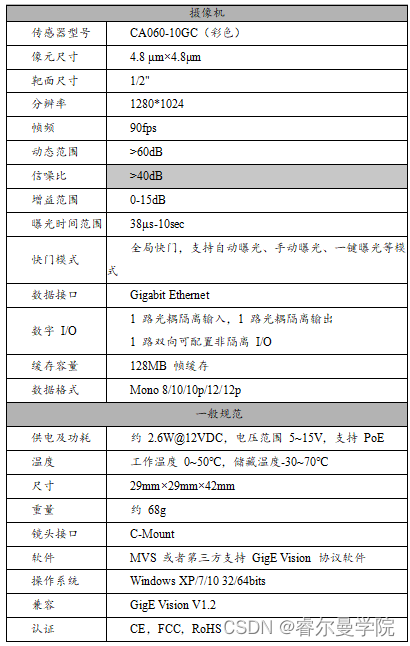
2.2、视觉传感器
视觉系统搭载在机械臂末端,在接近开关感知到安检框后负责识别安检框的位置姿态(安检框相对于传送带的位置角度),计算并发送角度参数给机械臂。该视觉系统选用海康威视CA060-10GC型号工业相机,可直接通过千兆以太网接口进行数据通信,视觉传感器参数如下表所示:

2.3、末端电动执行器
基于系统设计小巧、美观的原则,避免线缆和设备过多,选取电动夹爪,舍弃气动夹爪。将执行器直接集成在机械臂末端。
末端执行器是一款利用小体积大扭矩直线伺服驱动器设计生产的电动夹爪。该夹爪内部集成了 1 个直线伺服驱动器,用户接口采用 RS485 通信接口,内置灵敏的压力传感器,通过设置不同的压力阈值方便用户进行不同硬度物体的夹取。
这款夹爪可设置爪子张合时的速度、力度、位置。其中速度设置范围为 0~255, 力度设置范围为 0~255,位置设置范围为 0~255。电动夹爪最大开口为 70 毫米, 最高可实现 0-20N 的夹持力。

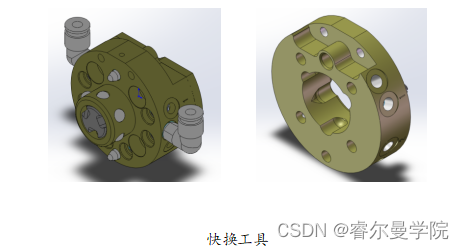
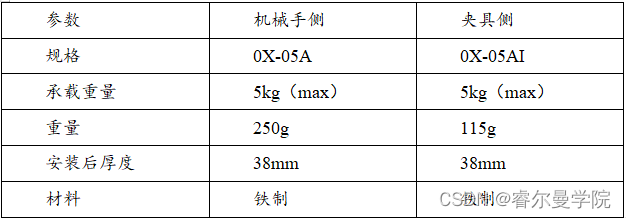
2.4、快换工具
快换工具分为机械手侧和夹具侧,配合使用,具体参数如下:
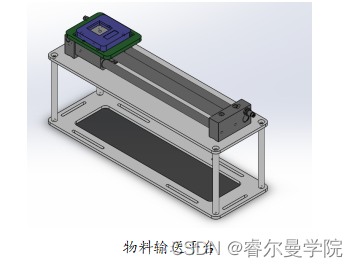
2.5、物料输送平台
物料输送模块采用一个无杆气缸,用来输送物料托盘。滑台支架采用铝合金材质,尺寸为470x150x216mm,气缸行程300mm。示意图如下所示:
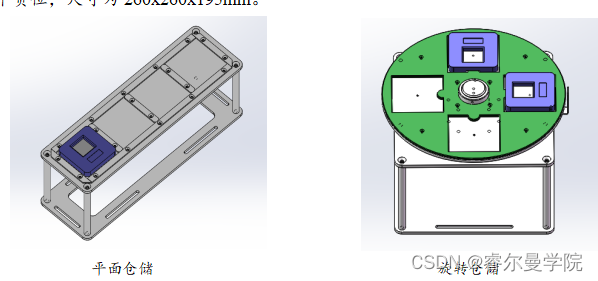
2.6、仓储
仓储包括一套旋转仓储、一套平面仓储,旋转仓储用来储存空托盘,平面仓储用来储存满托盘。平面仓储共有4个货位,尺寸为418x130x165mm。旋转仓储共有4个货位,尺寸为260x260x195mm。
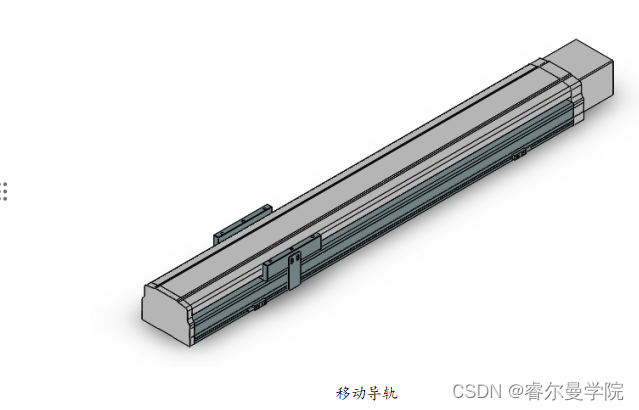
2.7、移动导轨
移动导轨用来增加机械臂工作空间。材料使用铝合金和铝型材。采用丝杠驱动的形式,工作电压24V,有效行程700mm。整体尺寸1000mm X 210mm X 110mm。示意图如下所示:
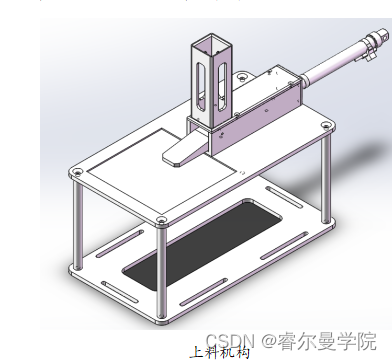
2.8、上料机构
该部分负责物料的自动上料,供机械臂进行识别抓取。高度319mm,气动推料,行程100mm,材料为铝合金。示意图如下所示:
三、方案提供商
3.1公司简介
睿尔曼是一家专注于超轻量仿人机械臂研发、生产及销售的国家高新技术企业,总部位于北京市石景山首特产业园,工厂建于江苏省常州科教城智能数字产业园内,下属另设有睿尔曼智能科技(深圳)有限公司全资子公司。公司集研发、生产、办公于一体,年综合产能20000 台以上。
自2010年起,睿尔曼便踏上了超轻量仿人机械臂的创新之旅,作为该领域的引领者,它始终坚守着产品研发与技术创新的初心。其核心团队汇聚了中国早期机器人底层技术研发的精英,他们在这一领域深耕细作,积累了超过十年的深厚底蕴和丰富经验。正是这样的团队,能够从基因层面进行机械臂的原型设计和底层零部件的自主研发,从而在控制器、驱动器、电机、减速器这四大核心零部件上实现了革命性的突破,打造出具有完全自主知识产权的超轻量仿人机械臂。
如今,睿尔曼的产品已广泛应用于新零售、新餐饮、商业服务、智能巡检、医疗健康、检验检疫、教育科研、工业生产、航空航天等多个领域,其智能、通用模块化的机械臂本体,融合了先进的软硬件与人机交互技术,为客户提供了高性价比、高可靠性、易操作的超轻量仿人机械臂及集成解决方案。
睿尔曼不仅拥有多年的机器人产品研发经验,更与北京航空航天大学、北京理工大学、中国农业大学等多所知名高校建立了紧密的战略合作关系,共同搭建了一个全方位、专业互补的创新研发平台。它始终怀揣着一个梦想:致力于让机械臂成为通用的智能化工具,让机器人走入千家万户,为美好生活助一臂之力!







![Navicat连接SQLSever报错:[08001] MicrosoftTCP Provider 远程主机强迫关闭了一个现有的连接](https://img-blog.csdnimg.cn/direct/3042b73736dc460eb532fe730002166b.png)