目录
简介
下载 LOL 数据集
创建 TensorFlow 数据集
零 DCE 框架
了解光线增强曲线
DCE-Net
损失函数
色彩恒定损失
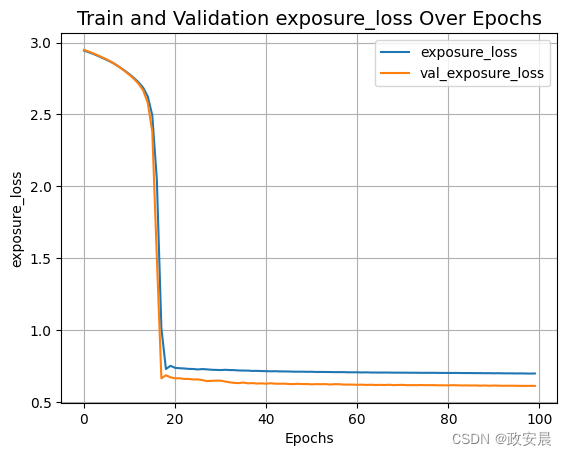
曝光损失
光照平滑度损失
空间一致性损失
深度曲线估计模型
训练
推论
测试图像推理
政安晨的个人主页:政安晨
欢迎 👍点赞✍评论⭐收藏
收录专栏: TensorFlow与Keras机器学习实战
希望政安晨的博客能够对您有所裨益,如有不足之处,欢迎在评论区提出指正!
本文目标:实施零参考深度曲线估算,实现低-高。
简介
零参考深度曲线估算(Zero-Reference Deep Curve Estimation 或 Zero-DCE)将低照度图像增强定义为利用深度神经网络估算图像特定色调曲线的任务。
在本示例中,我们训练一个轻量级深度网络 DCE-Net,以估计像素级和高阶色调曲线,从而调整给定图像的动态范围。
Zero-DCE 将低照度图像作为输入,并生成高阶色调曲线作为输出。然后利用这些曲线对输入图像的动态范围进行像素级调整,从而获得增强图像。曲线估算过程可以保持增强图像的范围,并保留相邻像素的对比度。这种曲线估算的灵感来自 Adobe Photoshop 等照片编辑软件中使用的曲线调整,用户可以在整个图像的色调范围内调整点。
Zero-DCE 的吸引力在于其对参考图像的宽松假设:它在训练过程中不需要任何输入/输出图像对。这是通过一组精心制定的非参考损失函数实现的,这些函数隐含地测量增强质量并指导网络的训练。
下载 LOL 数据集
LoL 数据集是为弱光图像增强而创建的。该数据集提供 485 幅图像用于训练,15 幅图像用于测试。数据集中的每对图像都由低照度输入图像和相应的曝光良好的参考图像组成。
import os
os.environ["KERAS_BACKEND"] = "tensorflow"
import random
import numpy as np
from glob import glob
from PIL import Image, ImageOps
import matplotlib.pyplot as plt
import keras
from keras import layers
import tensorflow as tf!wget https://huggingface.co/datasets/geekyrakshit/LoL-Dataset/resolve/main/lol_dataset.zip
!unzip -q lol_dataset.zip && rm lol_dataset.zip演绎如下:
--2023-11-20 20:01:50-- https://huggingface.co/datasets/geekyrakshit/LoL-Dataset/resolve/main/lol_dataset.zip
Resolving huggingface.co (huggingface.co)... 3.163.189.74, 3.163.189.90, 3.163.189.114, ...
Connecting to huggingface.co (huggingface.co)|3.163.189.74|:443... connected.
HTTP request sent, awaiting response... 302 Found
Location: https://cdn-lfs.huggingface.co/repos/d9/09/d909ef7668bb417b7065a311bd55a3084cc83a1f918e13cb41c5503328432db2/419fddc48958cd0f5599939ee0248852a37ceb8bb738c9b9525e95b25a89de9a?response-content-disposition=attachment%3B+filename*%3DUTF-8%27%27lol_dataset.zip%3B+filename%3D%22lol_dataset.zip%22%3B&response-content-type=application%2Fzip&Expires=1700769710&Policy=eyJTdGF0ZW1lbnQiOlt7IkNvbmRpdGlvbiI6eyJEYXRlTGVzc1RoYW4iOnsiQVdTOkVwb2NoVGltZSI6MTcwMDc2OTcxMH19LCJSZXNvdXJjZSI6Imh0dHBzOi8vY2RuLWxmcy5odWdnaW5nZmFjZS5jby9yZXBvcy9kOS8wOS9kOTA5ZWY3NjY4YmI0MTdiNzA2NWEzMTFiZDU1YTMwODRjYzgzYTFmOTE4ZTEzY2I0MWM1NTAzMzI4NDMyZGIyLzQxOWZkZGM0ODk1OGNkMGY1NTk5OTM5ZWUwMjQ4ODUyYTM3Y2ViOGJiNzM4YzliOTUyNWU5NWIyNWE4OWRlOWE%7EcmVzcG9uc2UtY29udGVudC1kaXNwb3NpdGlvbj0qJnJlc3BvbnNlLWNvbnRlbnQtdHlwZT0qIn1dfQ__&Signature=VPqHlt0h6mUV7D3alDMIO61VSvUX498wZn5rIpo4u5yTYOu2s9CbO82xeGfrZguIuENVO6yiuoUAlZO4XXDsGC0Gc3MR3KIoTGuI9URA815nrdvFE616XBooGAW200KOUmVj2IoySAufi-7ORPuspaVJoKqWr8wytt0hDpNMeaWSg766kVMkJB1Aywq6yu5KHFGkqvOPDWNZZO6yfOtdX2XfbXVuiaiUlS03gRZ58H9pYn535TrE3BYP4W1u%7EehJ4OACpsRsnrsrXDr--PLH5RsxApOR2neFLySta3LiN9mtdjSpOKGn0oUapDfCWG7Ik5OMB5PGGzQBTB5J0b0O9g__&Key-Pair-Id=KVTP0A1DKRTAX [following]
--2023-11-20 20:01:50-- https://cdn-lfs.huggingface.co/repos/d9/09/d909ef7668bb417b7065a311bd55a3084cc83a1f918e13cb41c5503328432db2/419fddc48958cd0f5599939ee0248852a37ceb8bb738c9b9525e95b25a89de9a?response-content-disposition=attachment%3B+filename*%3DUTF-8%27%27lol_dataset.zip%3B+filename%3D%22lol_dataset.zip%22%3B&response-content-type=application%2Fzip&Expires=1700769710&Policy=eyJTdGF0ZW1lbnQiOlt7IkNvbmRpdGlvbiI6eyJEYXRlTGVzc1RoYW4iOnsiQVdTOkVwb2NoVGltZSI6MTcwMDc2OTcxMH19LCJSZXNvdXJjZSI6Imh0dHBzOi8vY2RuLWxmcy5odWdnaW5nZmFjZS5jby9yZXBvcy9kOS8wOS9kOTA5ZWY3NjY4YmI0MTdiNzA2NWEzMTFiZDU1YTMwODRjYzgzYTFmOTE4ZTEzY2I0MWM1NTAzMzI4NDMyZGIyLzQxOWZkZGM0ODk1OGNkMGY1NTk5OTM5ZWUwMjQ4ODUyYTM3Y2ViOGJiNzM4YzliOTUyNWU5NWIyNWE4OWRlOWE%7EcmVzcG9uc2UtY29udGVudC1kaXNwb3NpdGlvbj0qJnJlc3BvbnNlLWNvbnRlbnQtdHlwZT0qIn1dfQ__&Signature=VPqHlt0h6mUV7D3alDMIO61VSvUX498wZn5rIpo4u5yTYOu2s9CbO82xeGfrZguIuENVO6yiuoUAlZO4XXDsGC0Gc3MR3KIoTGuI9URA815nrdvFE616XBooGAW200KOUmVj2IoySAufi-7ORPuspaVJoKqWr8wytt0hDpNMeaWSg766kVMkJB1Aywq6yu5KHFGkqvOPDWNZZO6yfOtdX2XfbXVuiaiUlS03gRZ58H9pYn535TrE3BYP4W1u%7EehJ4OACpsRsnrsrXDr--PLH5RsxApOR2neFLySta3LiN9mtdjSpOKGn0oUapDfCWG7Ik5OMB5PGGzQBTB5J0b0O9g__&Key-Pair-Id=KVTP0A1DKRTAX
Resolving cdn-lfs.huggingface.co (cdn-lfs.huggingface.co)... 108.138.94.122, 108.138.94.25, 108.138.94.14, ...
Connecting to cdn-lfs.huggingface.co (cdn-lfs.huggingface.co)|108.138.94.122|:443... connected.
HTTP request sent, awaiting response... 200 OK
Length: 347171015 (331M) [application/zip]
Saving to: ‘lol_dataset.zip’lol_dataset.zip 100%[===================>] 331.09M 37.4MB/s in 9.5s
2023-11-20 20:02:00 (34.9 MB/s) - ‘lol_dataset.zip’ saved [347171015/347171015]创建 TensorFlow 数据集
我们使用 LoL 数据集训练集中的 300 张弱光图像进行训练,并使用剩余的 185 张弱光图像进行验证。我们将图像大小调整为 256 x 256,以便同时用于训练和验证。请注意,为了训练 DCE-Net,我们不需要相应的增强图像。
IMAGE_SIZE = 256
BATCH_SIZE = 16
MAX_TRAIN_IMAGES = 400
def load_data(image_path):
image = tf.io.read_file(image_path)
image = tf.image.decode_png(image, channels=3)
image = tf.image.resize(images=image, size=[IMAGE_SIZE, IMAGE_SIZE])
image = image / 255.0
return image
def data_generator(low_light_images):
dataset = tf.data.Dataset.from_tensor_slices((low_light_images))
dataset = dataset.map(load_data, num_parallel_calls=tf.data.AUTOTUNE)
dataset = dataset.batch(BATCH_SIZE, drop_remainder=True)
return dataset
train_low_light_images = sorted(glob("./lol_dataset/our485/low/*"))[:MAX_TRAIN_IMAGES]
val_low_light_images = sorted(glob("./lol_dataset/our485/low/*"))[MAX_TRAIN_IMAGES:]
test_low_light_images = sorted(glob("./lol_dataset/eval15/low/*"))
train_dataset = data_generator(train_low_light_images)
val_dataset = data_generator(val_low_light_images)
print("Train Dataset:", train_dataset)
print("Validation Dataset:", val_dataset)演绎展示:
Train Dataset: <_BatchDataset element_spec=TensorSpec(shape=(16, 256, 256, 3), dtype=tf.float32, name=None)>
Validation Dataset: <_BatchDataset element_spec=TensorSpec(shape=(16, 256, 256, 3), dtype=tf.float32, name=None)>零 DCE 框架
DCE-Net 的目标是根据输入图像估算出一组最合适的光增强曲线 (LE-curves)。然后,该框架通过迭代应用这些曲线来映射输入图像 RGB 通道的所有像素,从而获得最终的增强图像。
了解光线增强曲线
光线增强曲线是一种能将低照度图像自动映射为增强版本的曲线,其自适应曲线参数完全取决于输入图像。在设计这种曲线时,应考虑三个目标:
× 增强图像的每个像素值都应在归一化范围 [0,1] 内,以避免溢出截断造成信息丢失。
× 它应该是单调的,以保持相邻像素之间的对比度。
× 曲线的形状应尽可能简单,曲线应可微分,以便进行反向传播。
光增强曲线分别应用于三个 RGB 通道,而不是只应用于照明通道。
三通道调整可以更好地保留固有色彩,降低过度饱和的风险。

DCE-Net
DCE-Net 是一种轻量级深度神经网络,可学习输入图像与其最佳拟合曲线参数图之间的映射。DCE-Net 的输入是一幅低亮度图像,而输出则是一组对应高阶曲线的像素曲线参数图。
它是一个由七个卷积层对称连接而成的普通 CNN。每层由 32 个大小为 3×3 和步长为 1 的卷积核组成,然后是 ReLU 激活函数。最后一个卷积层之后是 Tanh 激活函数,该函数在 8 次迭代中产生 24 个参数图,其中每次迭代需要三个通道的三个曲线参数图。
def build_dce_net():
input_img = keras.Input(shape=[None, None, 3])
conv1 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(input_img)
conv2 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(conv1)
conv3 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(conv2)
conv4 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(conv3)
int_con1 = layers.Concatenate(axis=-1)([conv4, conv3])
conv5 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(int_con1)
int_con2 = layers.Concatenate(axis=-1)([conv5, conv2])
conv6 = layers.Conv2D(
32, (3, 3), strides=(1, 1), activation="relu", padding="same"
)(int_con2)
int_con3 = layers.Concatenate(axis=-1)([conv6, conv1])
x_r = layers.Conv2D(24, (3, 3), strides=(1, 1), activation="tanh", padding="same")(
int_con3
)
return keras.Model(inputs=input_img, outputs=x_r)损失函数
为了在 DCE-Net 中实现零参考学习,我们使用了一组可微分的零参考损失,以便评估增强图像的质量。
色彩恒定损失
色彩不变性损失用于纠正增强图像中潜在的色彩偏差。
def color_constancy_loss(x):
mean_rgb = tf.reduce_mean(x, axis=(1, 2), keepdims=True)
mr, mg, mb = (
mean_rgb[:, :, :, 0],
mean_rgb[:, :, :, 1],
mean_rgb[:, :, :, 2],
)
d_rg = tf.square(mr - mg)
d_rb = tf.square(mr - mb)
d_gb = tf.square(mb - mg)
return tf.sqrt(tf.square(d_rg) + tf.square(d_rb) + tf.square(d_gb))曝光损失
为了抑制曝光不足/曝光过度的区域,我们使用了曝光控制损失。它测量的是局部区域的平均强度值与预设的良好曝光水平(设为 0.6)之间的距离。
def exposure_loss(x, mean_val=0.6):
x = tf.reduce_mean(x, axis=3, keepdims=True)
mean = tf.nn.avg_pool2d(x, ksize=16, strides=16, padding="VALID")
return tf.reduce_mean(tf.square(mean - mean_val))光照平滑度损失
为了保持相邻像素之间的单调性关系,每个曲线参数图都会添加光照平滑度损失。
def illumination_smoothness_loss(x):
batch_size = tf.shape(x)[0]
h_x = tf.shape(x)[1]
w_x = tf.shape(x)[2]
count_h = (tf.shape(x)[2] - 1) * tf.shape(x)[3]
count_w = tf.shape(x)[2] * (tf.shape(x)[3] - 1)
h_tv = tf.reduce_sum(tf.square((x[:, 1:, :, :] - x[:, : h_x - 1, :, :])))
w_tv = tf.reduce_sum(tf.square((x[:, :, 1:, :] - x[:, :, : w_x - 1, :])))
batch_size = tf.cast(batch_size, dtype=tf.float32)
count_h = tf.cast(count_h, dtype=tf.float32)
count_w = tf.cast(count_w, dtype=tf.float32)
return 2 * (h_tv / count_h + w_tv / count_w) / batch_size空间一致性损失
空间一致性损失通过保持输入图像及其增强版本中相邻区域之间的对比度,促进增强图像的空间一致性。
class SpatialConsistencyLoss(keras.losses.Loss):
def __init__(self, **kwargs):
super().__init__(reduction="none")
self.left_kernel = tf.constant(
[[[[0, 0, 0]], [[-1, 1, 0]], [[0, 0, 0]]]], dtype=tf.float32
)
self.right_kernel = tf.constant(
[[[[0, 0, 0]], [[0, 1, -1]], [[0, 0, 0]]]], dtype=tf.float32
)
self.up_kernel = tf.constant(
[[[[0, -1, 0]], [[0, 1, 0]], [[0, 0, 0]]]], dtype=tf.float32
)
self.down_kernel = tf.constant(
[[[[0, 0, 0]], [[0, 1, 0]], [[0, -1, 0]]]], dtype=tf.float32
)
def call(self, y_true, y_pred):
original_mean = tf.reduce_mean(y_true, 3, keepdims=True)
enhanced_mean = tf.reduce_mean(y_pred, 3, keepdims=True)
original_pool = tf.nn.avg_pool2d(
original_mean, ksize=4, strides=4, padding="VALID"
)
enhanced_pool = tf.nn.avg_pool2d(
enhanced_mean, ksize=4, strides=4, padding="VALID"
)
d_original_left = tf.nn.conv2d(
original_pool,
self.left_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_original_right = tf.nn.conv2d(
original_pool,
self.right_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_original_up = tf.nn.conv2d(
original_pool, self.up_kernel, strides=[1, 1, 1, 1], padding="SAME"
)
d_original_down = tf.nn.conv2d(
original_pool,
self.down_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_enhanced_left = tf.nn.conv2d(
enhanced_pool,
self.left_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_enhanced_right = tf.nn.conv2d(
enhanced_pool,
self.right_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_enhanced_up = tf.nn.conv2d(
enhanced_pool, self.up_kernel, strides=[1, 1, 1, 1], padding="SAME"
)
d_enhanced_down = tf.nn.conv2d(
enhanced_pool,
self.down_kernel,
strides=[1, 1, 1, 1],
padding="SAME",
)
d_left = tf.square(d_original_left - d_enhanced_left)
d_right = tf.square(d_original_right - d_enhanced_right)
d_up = tf.square(d_original_up - d_enhanced_up)
d_down = tf.square(d_original_down - d_enhanced_down)
return d_left + d_right + d_up + d_down深度曲线估计模型
我们将 Zero-DCE 框架作为 Keras 子类模型来实现。
class ZeroDCE(keras.Model):
def __init__(self, **kwargs):
super().__init__(**kwargs)
self.dce_model = build_dce_net()
def compile(self, learning_rate, **kwargs):
super().compile(**kwargs)
self.optimizer = keras.optimizers.Adam(learning_rate=learning_rate)
self.spatial_constancy_loss = SpatialConsistencyLoss(reduction="none")
self.total_loss_tracker = keras.metrics.Mean(name="total_loss")
self.illumination_smoothness_loss_tracker = keras.metrics.Mean(
name="illumination_smoothness_loss"
)
self.spatial_constancy_loss_tracker = keras.metrics.Mean(
name="spatial_constancy_loss"
)
self.color_constancy_loss_tracker = keras.metrics.Mean(
name="color_constancy_loss"
)
self.exposure_loss_tracker = keras.metrics.Mean(name="exposure_loss")
@property
def metrics(self):
return [
self.total_loss_tracker,
self.illumination_smoothness_loss_tracker,
self.spatial_constancy_loss_tracker,
self.color_constancy_loss_tracker,
self.exposure_loss_tracker,
]
def get_enhanced_image(self, data, output):
r1 = output[:, :, :, :3]
r2 = output[:, :, :, 3:6]
r3 = output[:, :, :, 6:9]
r4 = output[:, :, :, 9:12]
r5 = output[:, :, :, 12:15]
r6 = output[:, :, :, 15:18]
r7 = output[:, :, :, 18:21]
r8 = output[:, :, :, 21:24]
x = data + r1 * (tf.square(data) - data)
x = x + r2 * (tf.square(x) - x)
x = x + r3 * (tf.square(x) - x)
enhanced_image = x + r4 * (tf.square(x) - x)
x = enhanced_image + r5 * (tf.square(enhanced_image) - enhanced_image)
x = x + r6 * (tf.square(x) - x)
x = x + r7 * (tf.square(x) - x)
enhanced_image = x + r8 * (tf.square(x) - x)
return enhanced_image
def call(self, data):
dce_net_output = self.dce_model(data)
return self.get_enhanced_image(data, dce_net_output)
def compute_losses(self, data, output):
enhanced_image = self.get_enhanced_image(data, output)
loss_illumination = 200 * illumination_smoothness_loss(output)
loss_spatial_constancy = tf.reduce_mean(
self.spatial_constancy_loss(enhanced_image, data)
)
loss_color_constancy = 5 * tf.reduce_mean(color_constancy_loss(enhanced_image))
loss_exposure = 10 * tf.reduce_mean(exposure_loss(enhanced_image))
total_loss = (
loss_illumination
+ loss_spatial_constancy
+ loss_color_constancy
+ loss_exposure
)
return {
"total_loss": total_loss,
"illumination_smoothness_loss": loss_illumination,
"spatial_constancy_loss": loss_spatial_constancy,
"color_constancy_loss": loss_color_constancy,
"exposure_loss": loss_exposure,
}
def train_step(self, data):
with tf.GradientTape() as tape:
output = self.dce_model(data)
losses = self.compute_losses(data, output)
gradients = tape.gradient(
losses["total_loss"], self.dce_model.trainable_weights
)
self.optimizer.apply_gradients(zip(gradients, self.dce_model.trainable_weights))
self.total_loss_tracker.update_state(losses["total_loss"])
self.illumination_smoothness_loss_tracker.update_state(
losses["illumination_smoothness_loss"]
)
self.spatial_constancy_loss_tracker.update_state(
losses["spatial_constancy_loss"]
)
self.color_constancy_loss_tracker.update_state(losses["color_constancy_loss"])
self.exposure_loss_tracker.update_state(losses["exposure_loss"])
return {metric.name: metric.result() for metric in self.metrics}
def test_step(self, data):
output = self.dce_model(data)
losses = self.compute_losses(data, output)
self.total_loss_tracker.update_state(losses["total_loss"])
self.illumination_smoothness_loss_tracker.update_state(
losses["illumination_smoothness_loss"]
)
self.spatial_constancy_loss_tracker.update_state(
losses["spatial_constancy_loss"]
)
self.color_constancy_loss_tracker.update_state(losses["color_constancy_loss"])
self.exposure_loss_tracker.update_state(losses["exposure_loss"])
return {metric.name: metric.result() for metric in self.metrics}
def save_weights(self, filepath, overwrite=True, save_format=None, options=None):
"""While saving the weights, we simply save the weights of the DCE-Net"""
self.dce_model.save_weights(
filepath,
overwrite=overwrite,
save_format=save_format,
options=options,
)
def load_weights(self, filepath, by_name=False, skip_mismatch=False, options=None):
"""While loading the weights, we simply load the weights of the DCE-Net"""
self.dce_model.load_weights(
filepath=filepath,
by_name=by_name,
skip_mismatch=skip_mismatch,
options=options,
)训练
zero_dce_model = ZeroDCE()
zero_dce_model.compile(learning_rate=1e-4)
history = zero_dce_model.fit(train_dataset, validation_data=val_dataset, epochs=100)
def plot_result(item):
plt.plot(history.history[item], label=item)
plt.plot(history.history["val_" + item], label="val_" + item)
plt.xlabel("Epochs")
plt.ylabel(item)
plt.title("Train and Validation {} Over Epochs".format(item), fontsize=14)
plt.legend()
plt.grid()
plt.show()
plot_result("total_loss")
plot_result("illumination_smoothness_loss")
plot_result("spatial_constancy_loss")
plot_result("color_constancy_loss")
plot_result("exposure_loss")演绎展示:
Epoch 1/100
2/25 ━[37m━━━━━━━━━━━━━━━━━━━ 1s 85ms/step - color_constancy_loss: 0.0013 - exposure_loss: 3.0376 - illumination_smoothness_loss: 2.5211 - spatial_constancy_loss: 4.6834e-07 - total_loss: 5.5601
WARNING: All log messages before absl::InitializeLog() is called are written to STDERR
I0000 00:00:1700510538.106578 3409375 device_compiler.h:187] Compiled cluster using XLA! This line is logged at most once for the lifetime of the process.
25/25 ━━━━━━━━━━━━━━━━━━━━ 16s 123ms/step - color_constancy_loss: 0.0029 - exposure_loss: 2.9968 - illumination_smoothness_loss: 2.1813 - spatial_constancy_loss: 1.8559e-06 - total_loss: 5.1810 - val_color_constancy_loss: 0.0023 - val_exposure_loss: 2.9489 - val_illumination_smoothness_loss: 2.7063 - val_spatial_constancy_loss: 5.0979e-06 - val_total_loss: 5.6575
Epoch 2/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0030 - exposure_loss: 2.9854 - illumination_smoothness_loss: 1.2876 - spatial_constancy_loss: 6.1811e-06 - total_loss: 4.2759 - val_color_constancy_loss: 0.0023 - val_exposure_loss: 2.9381 - val_illumination_smoothness_loss: 1.8299 - val_spatial_constancy_loss: 1.3742e-05 - val_total_loss: 4.7703
Epoch 3/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0031 - exposure_loss: 2.9746 - illumination_smoothness_loss: 0.8735 - spatial_constancy_loss: 1.6664e-05 - total_loss: 3.8512 - val_color_constancy_loss: 0.0024 - val_exposure_loss: 2.9255 - val_illumination_smoothness_loss: 1.3135 - val_spatial_constancy_loss: 3.1783e-05 - val_total_loss: 4.2414
Epoch 4/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0032 - exposure_loss: 2.9623 - illumination_smoothness_loss: 0.6259 - spatial_constancy_loss: 3.7938e-05 - total_loss: 3.5914 - val_color_constancy_loss: 0.0025 - val_exposure_loss: 2.9118 - val_illumination_smoothness_loss: 0.9835 - val_spatial_constancy_loss: 6.1902e-05 - val_total_loss: 3.8979
Epoch 5/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0033 - exposure_loss: 2.9493 - illumination_smoothness_loss: 0.4700 - spatial_constancy_loss: 7.2080e-05 - total_loss: 3.4226 - val_color_constancy_loss: 0.0026 - val_exposure_loss: 2.8976 - val_illumination_smoothness_loss: 0.7751 - val_spatial_constancy_loss: 1.0500e-04 - val_total_loss: 3.6754
Epoch 6/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0034 - exposure_loss: 2.9358 - illumination_smoothness_loss: 0.3693 - spatial_constancy_loss: 1.1878e-04 - total_loss: 3.3086 - val_color_constancy_loss: 0.0027 - val_exposure_loss: 2.8829 - val_illumination_smoothness_loss: 0.6316 - val_spatial_constancy_loss: 1.6075e-04 - val_total_loss: 3.5173
Epoch 7/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0036 - exposure_loss: 2.9219 - illumination_smoothness_loss: 0.2996 - spatial_constancy_loss: 1.7723e-04 - total_loss: 3.2252 - val_color_constancy_loss: 0.0028 - val_exposure_loss: 2.8660 - val_illumination_smoothness_loss: 0.5261 - val_spatial_constancy_loss: 2.3790e-04 - val_total_loss: 3.3951
Epoch 8/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0037 - exposure_loss: 2.9056 - illumination_smoothness_loss: 0.2486 - spatial_constancy_loss: 2.5932e-04 - total_loss: 3.1582 - val_color_constancy_loss: 0.0029 - val_exposure_loss: 2.8466 - val_illumination_smoothness_loss: 0.4454 - val_spatial_constancy_loss: 3.4372e-04 - val_total_loss: 3.2952
Epoch 9/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0039 - exposure_loss: 2.8872 - illumination_smoothness_loss: 0.2110 - spatial_constancy_loss: 3.6800e-04 - total_loss: 3.1025 - val_color_constancy_loss: 0.0031 - val_exposure_loss: 2.8244 - val_illumination_smoothness_loss: 0.3853 - val_spatial_constancy_loss: 4.8290e-04 - val_total_loss: 3.2132
Epoch 10/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0041 - exposure_loss: 2.8665 - illumination_smoothness_loss: 0.1846 - spatial_constancy_loss: 5.0693e-04 - total_loss: 3.0558 - val_color_constancy_loss: 0.0033 - val_exposure_loss: 2.8002 - val_illumination_smoothness_loss: 0.3395 - val_spatial_constancy_loss: 6.5965e-04 - val_total_loss: 3.1436
Epoch 11/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0044 - exposure_loss: 2.8440 - illumination_smoothness_loss: 0.1654 - spatial_constancy_loss: 6.8036e-04 - total_loss: 3.0145 - val_color_constancy_loss: 0.0035 - val_exposure_loss: 2.7749 - val_illumination_smoothness_loss: 0.3031 - val_spatial_constancy_loss: 8.6824e-04 - val_total_loss: 3.0824
Epoch 12/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0047 - exposure_loss: 2.8198 - illumination_smoothness_loss: 0.1512 - spatial_constancy_loss: 8.9387e-04 - total_loss: 2.9765 - val_color_constancy_loss: 0.0038 - val_exposure_loss: 2.7463 - val_illumination_smoothness_loss: 0.2753 - val_spatial_constancy_loss: 0.0011 - val_total_loss: 3.0265
Epoch 13/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0050 - exposure_loss: 2.7928 - illumination_smoothness_loss: 0.1408 - spatial_constancy_loss: 0.0012 - total_loss: 2.9398 - val_color_constancy_loss: 0.0041 - val_exposure_loss: 2.7132 - val_illumination_smoothness_loss: 0.2537 - val_spatial_constancy_loss: 0.0015 - val_total_loss: 2.9724
Epoch 14/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0054 - exposure_loss: 2.7600 - illumination_smoothness_loss: 0.1340 - spatial_constancy_loss: 0.0016 - total_loss: 2.9009 - val_color_constancy_loss: 0.0045 - val_exposure_loss: 2.6673 - val_illumination_smoothness_loss: 0.2389 - val_spatial_constancy_loss: 0.0021 - val_total_loss: 2.9129
Epoch 15/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0060 - exposure_loss: 2.7115 - illumination_smoothness_loss: 0.1314 - spatial_constancy_loss: 0.0022 - total_loss: 2.8512 - val_color_constancy_loss: 0.0055 - val_exposure_loss: 2.5820 - val_illumination_smoothness_loss: 0.2374 - val_spatial_constancy_loss: 0.0035 - val_total_loss: 2.8284
Epoch 16/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0075 - exposure_loss: 2.6129 - illumination_smoothness_loss: 0.1414 - spatial_constancy_loss: 0.0041 - total_loss: 2.7660 - val_color_constancy_loss: 0.0081 - val_exposure_loss: 2.3797 - val_illumination_smoothness_loss: 0.2453 - val_spatial_constancy_loss: 0.0083 - val_total_loss: 2.6414
Epoch 17/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0128 - exposure_loss: 2.3149 - illumination_smoothness_loss: 0.1766 - spatial_constancy_loss: 0.0148 - total_loss: 2.5190 - val_color_constancy_loss: 0.0286 - val_exposure_loss: 1.5060 - val_illumination_smoothness_loss: 0.3288 - val_spatial_constancy_loss: 0.0648 - val_total_loss: 1.9282
Epoch 18/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0505 - exposure_loss: 1.3386 - illumination_smoothness_loss: 0.2606 - spatial_constancy_loss: 0.1196 - total_loss: 1.7693 - val_color_constancy_loss: 0.0827 - val_exposure_loss: 0.6645 - val_illumination_smoothness_loss: 0.2964 - val_spatial_constancy_loss: 0.2687 - val_total_loss: 1.3123
Epoch 19/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0873 - exposure_loss: 0.8174 - illumination_smoothness_loss: 0.2378 - spatial_constancy_loss: 0.2577 - total_loss: 1.4002 - val_color_constancy_loss: 0.0861 - val_exposure_loss: 0.6856 - val_illumination_smoothness_loss: 0.2464 - val_spatial_constancy_loss: 0.2539 - val_total_loss: 1.2719
Epoch 20/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0753 - exposure_loss: 0.8584 - illumination_smoothness_loss: 0.1858 - spatial_constancy_loss: 0.2394 - total_loss: 1.3589 - val_color_constancy_loss: 0.0882 - val_exposure_loss: 0.6714 - val_illumination_smoothness_loss: 0.2195 - val_spatial_constancy_loss: 0.2620 - val_total_loss: 1.2410
Epoch 21/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0779 - exposure_loss: 0.8382 - illumination_smoothness_loss: 0.1706 - spatial_constancy_loss: 0.2486 - total_loss: 1.3354 - val_color_constancy_loss: 0.0886 - val_exposure_loss: 0.6648 - val_illumination_smoothness_loss: 0.2072 - val_spatial_constancy_loss: 0.2643 - val_total_loss: 1.2249
Epoch 22/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0784 - exposure_loss: 0.8337 - illumination_smoothness_loss: 0.1590 - spatial_constancy_loss: 0.2502 - total_loss: 1.3212 - val_color_constancy_loss: 0.0889 - val_exposure_loss: 0.6647 - val_illumination_smoothness_loss: 0.1934 - val_spatial_constancy_loss: 0.2653 - val_total_loss: 1.2122
Epoch 23/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0783 - exposure_loss: 0.8329 - illumination_smoothness_loss: 0.1498 - spatial_constancy_loss: 0.2508 - total_loss: 1.3118 - val_color_constancy_loss: 0.0897 - val_exposure_loss: 0.6602 - val_illumination_smoothness_loss: 0.1834 - val_spatial_constancy_loss: 0.2671 - val_total_loss: 1.2003
Epoch 24/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0787 - exposure_loss: 0.8283 - illumination_smoothness_loss: 0.1426 - spatial_constancy_loss: 0.2529 - total_loss: 1.3025 - val_color_constancy_loss: 0.0897 - val_exposure_loss: 0.6601 - val_illumination_smoothness_loss: 0.1754 - val_spatial_constancy_loss: 0.2671 - val_total_loss: 1.1923
Epoch 25/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0785 - exposure_loss: 0.8294 - illumination_smoothness_loss: 0.1365 - spatial_constancy_loss: 0.2524 - total_loss: 1.2968 - val_color_constancy_loss: 0.0902 - val_exposure_loss: 0.6562 - val_illumination_smoothness_loss: 0.1672 - val_spatial_constancy_loss: 0.2692 - val_total_loss: 1.1828
Epoch 26/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0793 - exposure_loss: 0.8229 - illumination_smoothness_loss: 0.1316 - spatial_constancy_loss: 0.2554 - total_loss: 1.2892 - val_color_constancy_loss: 0.0896 - val_exposure_loss: 0.6567 - val_illumination_smoothness_loss: 0.1606 - val_spatial_constancy_loss: 0.2699 - val_total_loss: 1.1768
Epoch 27/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0788 - exposure_loss: 0.8285 - illumination_smoothness_loss: 0.1238 - spatial_constancy_loss: 0.2534 - total_loss: 1.2845 - val_color_constancy_loss: 0.0906 - val_exposure_loss: 0.6519 - val_illumination_smoothness_loss: 0.1574 - val_spatial_constancy_loss: 0.2725 - val_total_loss: 1.1724
Epoch 28/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0794 - exposure_loss: 0.8247 - illumination_smoothness_loss: 0.1194 - spatial_constancy_loss: 0.2550 - total_loss: 1.2785 - val_color_constancy_loss: 0.0914 - val_exposure_loss: 0.6451 - val_illumination_smoothness_loss: 0.1542 - val_spatial_constancy_loss: 0.2783 - val_total_loss: 1.1689
Epoch 29/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0797 - exposure_loss: 0.8203 - illumination_smoothness_loss: 0.1139 - spatial_constancy_loss: 0.2577 - total_loss: 1.2715 - val_color_constancy_loss: 0.0914 - val_exposure_loss: 0.6468 - val_illumination_smoothness_loss: 0.1435 - val_spatial_constancy_loss: 0.2775 - val_total_loss: 1.1592
Epoch 30/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0795 - exposure_loss: 0.8199 - illumination_smoothness_loss: 0.1083 - spatial_constancy_loss: 0.2581 - total_loss: 1.2659 - val_color_constancy_loss: 0.0911 - val_exposure_loss: 0.6483 - val_illumination_smoothness_loss: 0.1336 - val_spatial_constancy_loss: 0.2768 - val_total_loss: 1.1498
Epoch 31/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0797 - exposure_loss: 0.8194 - illumination_smoothness_loss: 0.1037 - spatial_constancy_loss: 0.2589 - total_loss: 1.2617 - val_color_constancy_loss: 0.0912 - val_exposure_loss: 0.6483 - val_illumination_smoothness_loss: 0.1289 - val_spatial_constancy_loss: 0.2772 - val_total_loss: 1.1456
Epoch 32/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0794 - exposure_loss: 0.8226 - illumination_smoothness_loss: 0.0982 - spatial_constancy_loss: 0.2578 - total_loss: 1.2580 - val_color_constancy_loss: 0.0923 - val_exposure_loss: 0.6421 - val_illumination_smoothness_loss: 0.1251 - val_spatial_constancy_loss: 0.2814 - val_total_loss: 1.1409
Epoch 33/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0801 - exposure_loss: 0.8188 - illumination_smoothness_loss: 0.0939 - spatial_constancy_loss: 0.2601 - total_loss: 1.2529 - val_color_constancy_loss: 0.0934 - val_exposure_loss: 0.6367 - val_illumination_smoothness_loss: 0.1261 - val_spatial_constancy_loss: 0.2853 - val_total_loss: 1.1416
Epoch 34/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0802 - exposure_loss: 0.8173 - illumination_smoothness_loss: 0.0889 - spatial_constancy_loss: 0.2611 - total_loss: 1.2475 - val_color_constancy_loss: 0.0941 - val_exposure_loss: 0.6326 - val_illumination_smoothness_loss: 0.1227 - val_spatial_constancy_loss: 0.2883 - val_total_loss: 1.1378
Epoch 35/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0807 - exposure_loss: 0.8134 - illumination_smoothness_loss: 0.0844 - spatial_constancy_loss: 0.2632 - total_loss: 1.2418 - val_color_constancy_loss: 0.0946 - val_exposure_loss: 0.6312 - val_illumination_smoothness_loss: 0.1180 - val_spatial_constancy_loss: 0.2893 - val_total_loss: 1.1330
Epoch 36/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0808 - exposure_loss: 0.8119 - illumination_smoothness_loss: 0.0798 - spatial_constancy_loss: 0.2644 - total_loss: 1.2368 - val_color_constancy_loss: 0.0941 - val_exposure_loss: 0.6351 - val_illumination_smoothness_loss: 0.1096 - val_spatial_constancy_loss: 0.2865 - val_total_loss: 1.1253
Epoch 37/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0807 - exposure_loss: 0.8127 - illumination_smoothness_loss: 0.0759 - spatial_constancy_loss: 0.2637 - total_loss: 1.2330 - val_color_constancy_loss: 0.0949 - val_exposure_loss: 0.6295 - val_illumination_smoothness_loss: 0.1088 - val_spatial_constancy_loss: 0.2904 - val_total_loss: 1.1237
Epoch 38/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0812 - exposure_loss: 0.8091 - illumination_smoothness_loss: 0.0732 - spatial_constancy_loss: 0.2658 - total_loss: 1.2293 - val_color_constancy_loss: 0.0946 - val_exposure_loss: 0.6313 - val_illumination_smoothness_loss: 0.1022 - val_spatial_constancy_loss: 0.2893 - val_total_loss: 1.1174
Epoch 39/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0810 - exposure_loss: 0.8100 - illumination_smoothness_loss: 0.0694 - spatial_constancy_loss: 0.2655 - total_loss: 1.2259 - val_color_constancy_loss: 0.0953 - val_exposure_loss: 0.6278 - val_illumination_smoothness_loss: 0.1015 - val_spatial_constancy_loss: 0.2918 - val_total_loss: 1.1164
Epoch 40/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0813 - exposure_loss: 0.8077 - illumination_smoothness_loss: 0.0668 - spatial_constancy_loss: 0.2668 - total_loss: 1.2226 - val_color_constancy_loss: 0.0951 - val_exposure_loss: 0.6294 - val_illumination_smoothness_loss: 0.0950 - val_spatial_constancy_loss: 0.2907 - val_total_loss: 1.1103
Epoch 41/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0814 - exposure_loss: 0.8074 - illumination_smoothness_loss: 0.0639 - spatial_constancy_loss: 0.2669 - total_loss: 1.2195 - val_color_constancy_loss: 0.0955 - val_exposure_loss: 0.6263 - val_illumination_smoothness_loss: 0.0946 - val_spatial_constancy_loss: 0.2930 - val_total_loss: 1.1093
Epoch 42/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0816 - exposure_loss: 0.8056 - illumination_smoothness_loss: 0.0613 - spatial_constancy_loss: 0.2684 - total_loss: 1.2168 - val_color_constancy_loss: 0.0950 - val_exposure_loss: 0.6304 - val_illumination_smoothness_loss: 0.0876 - val_spatial_constancy_loss: 0.2900 - val_total_loss: 1.1031
Epoch 43/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0813 - exposure_loss: 0.8074 - illumination_smoothness_loss: 0.0582 - spatial_constancy_loss: 0.2671 - total_loss: 1.2140 - val_color_constancy_loss: 0.0953 - val_exposure_loss: 0.6271 - val_illumination_smoothness_loss: 0.0859 - val_spatial_constancy_loss: 0.2925 - val_total_loss: 1.1008
Epoch 44/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0816 - exposure_loss: 0.8048 - illumination_smoothness_loss: 0.0564 - spatial_constancy_loss: 0.2687 - total_loss: 1.2115 - val_color_constancy_loss: 0.0956 - val_exposure_loss: 0.6266 - val_illumination_smoothness_loss: 0.0837 - val_spatial_constancy_loss: 0.2930 - val_total_loss: 1.0988
Epoch 45/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0816 - exposure_loss: 0.8045 - illumination_smoothness_loss: 0.0541 - spatial_constancy_loss: 0.2690 - total_loss: 1.2093 - val_color_constancy_loss: 0.0955 - val_exposure_loss: 0.6275 - val_illumination_smoothness_loss: 0.0796 - val_spatial_constancy_loss: 0.2923 - val_total_loss: 1.0949
Epoch 46/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0816 - exposure_loss: 0.8043 - illumination_smoothness_loss: 0.0517 - spatial_constancy_loss: 0.2691 - total_loss: 1.2067 - val_color_constancy_loss: 0.0959 - val_exposure_loss: 0.6245 - val_illumination_smoothness_loss: 0.0790 - val_spatial_constancy_loss: 0.2945 - val_total_loss: 1.0939
Epoch 47/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0819 - exposure_loss: 0.8025 - illumination_smoothness_loss: 0.0505 - spatial_constancy_loss: 0.2701 - total_loss: 1.2050 - val_color_constancy_loss: 0.0960 - val_exposure_loss: 0.6242 - val_illumination_smoothness_loss: 0.0764 - val_spatial_constancy_loss: 0.2949 - val_total_loss: 1.0914
Epoch 48/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0819 - exposure_loss: 0.8021 - illumination_smoothness_loss: 0.0482 - spatial_constancy_loss: 0.2706 - total_loss: 1.2027 - val_color_constancy_loss: 0.0957 - val_exposure_loss: 0.6262 - val_illumination_smoothness_loss: 0.0721 - val_spatial_constancy_loss: 0.2934 - val_total_loss: 1.0874
Epoch 49/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0818 - exposure_loss: 0.8027 - illumination_smoothness_loss: 0.0463 - spatial_constancy_loss: 0.2702 - total_loss: 1.2010 - val_color_constancy_loss: 0.0959 - val_exposure_loss: 0.6244 - val_illumination_smoothness_loss: 0.0712 - val_spatial_constancy_loss: 0.2947 - val_total_loss: 1.0863
Epoch 50/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0820 - exposure_loss: 0.8015 - illumination_smoothness_loss: 0.0446 - spatial_constancy_loss: 0.2711 - total_loss: 1.1992 - val_color_constancy_loss: 0.0959 - val_exposure_loss: 0.6248 - val_illumination_smoothness_loss: 0.0688 - val_spatial_constancy_loss: 0.2945 - val_total_loss: 1.0839
Epoch 51/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0819 - exposure_loss: 0.8019 - illumination_smoothness_loss: 0.0429 - spatial_constancy_loss: 0.2707 - total_loss: 1.1974 - val_color_constancy_loss: 0.0964 - val_exposure_loss: 0.6224 - val_illumination_smoothness_loss: 0.0677 - val_spatial_constancy_loss: 0.2964 - val_total_loss: 1.0829
Epoch 52/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0823 - exposure_loss: 0.7996 - illumination_smoothness_loss: 0.0416 - spatial_constancy_loss: 0.2721 - total_loss: 1.1955 - val_color_constancy_loss: 0.0958 - val_exposure_loss: 0.6240 - val_illumination_smoothness_loss: 0.0644 - val_spatial_constancy_loss: 0.2951 - val_total_loss: 1.0793
Epoch 53/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0822 - exposure_loss: 0.8004 - illumination_smoothness_loss: 0.0399 - spatial_constancy_loss: 0.2717 - total_loss: 1.1941 - val_color_constancy_loss: 0.0960 - val_exposure_loss: 0.6234 - val_illumination_smoothness_loss: 0.0633 - val_spatial_constancy_loss: 0.2957 - val_total_loss: 1.0785
Epoch 54/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0823 - exposure_loss: 0.7997 - illumination_smoothness_loss: 0.0382 - spatial_constancy_loss: 0.2723 - total_loss: 1.1924 - val_color_constancy_loss: 0.0959 - val_exposure_loss: 0.6242 - val_illumination_smoothness_loss: 0.0591 - val_spatial_constancy_loss: 0.2951 - val_total_loss: 1.0744
Epoch 55/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0822 - exposure_loss: 0.7999 - illumination_smoothness_loss: 0.0362 - spatial_constancy_loss: 0.2721 - total_loss: 1.1904 - val_color_constancy_loss: 0.0965 - val_exposure_loss: 0.6211 - val_illumination_smoothness_loss: 0.0603 - val_spatial_constancy_loss: 0.2974 - val_total_loss: 1.0754
Epoch 56/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0825 - exposure_loss: 0.7983 - illumination_smoothness_loss: 0.0351 - spatial_constancy_loss: 0.2732 - total_loss: 1.1890 - val_color_constancy_loss: 0.0960 - val_exposure_loss: 0.6237 - val_illumination_smoothness_loss: 0.0547 - val_spatial_constancy_loss: 0.2955 - val_total_loss: 1.0699
Epoch 57/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0823 - exposure_loss: 0.7987 - illumination_smoothness_loss: 0.0331 - spatial_constancy_loss: 0.2730 - total_loss: 1.1871 - val_color_constancy_loss: 0.0963 - val_exposure_loss: 0.6236 - val_illumination_smoothness_loss: 0.0540 - val_spatial_constancy_loss: 0.2956 - val_total_loss: 1.0694
Epoch 58/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0823 - exposure_loss: 0.7990 - illumination_smoothness_loss: 0.0319 - spatial_constancy_loss: 0.2727 - total_loss: 1.1859 - val_color_constancy_loss: 0.0965 - val_exposure_loss: 0.6210 - val_illumination_smoothness_loss: 0.0537 - val_spatial_constancy_loss: 0.2976 - val_total_loss: 1.0688
Epoch 59/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0826 - exposure_loss: 0.7969 - illumination_smoothness_loss: 0.0315 - spatial_constancy_loss: 0.2740 - total_loss: 1.1850 - val_color_constancy_loss: 0.0966 - val_exposure_loss: 0.6208 - val_illumination_smoothness_loss: 0.0530 - val_spatial_constancy_loss: 0.2978 - val_total_loss: 1.0682
Epoch 60/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0824 - exposure_loss: 0.7971 - illumination_smoothness_loss: 0.0304 - spatial_constancy_loss: 0.2740 - total_loss: 1.1840 - val_color_constancy_loss: 0.0966 - val_exposure_loss: 0.6206 - val_illumination_smoothness_loss: 0.0516 - val_spatial_constancy_loss: 0.2979 - val_total_loss: 1.0667
Epoch 61/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0825 - exposure_loss: 0.7969 - illumination_smoothness_loss: 0.0295 - spatial_constancy_loss: 0.2741 - total_loss: 1.1829 - val_color_constancy_loss: 0.0969 - val_exposure_loss: 0.6194 - val_illumination_smoothness_loss: 0.0506 - val_spatial_constancy_loss: 0.2988 - val_total_loss: 1.0657
Epoch 62/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7954 - illumination_smoothness_loss: 0.0287 - spatial_constancy_loss: 0.2749 - total_loss: 1.1817 - val_color_constancy_loss: 0.0967 - val_exposure_loss: 0.6203 - val_illumination_smoothness_loss: 0.0494 - val_spatial_constancy_loss: 0.2981 - val_total_loss: 1.0644
Epoch 63/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0825 - exposure_loss: 0.7966 - illumination_smoothness_loss: 0.0278 - spatial_constancy_loss: 0.2742 - total_loss: 1.1810 - val_color_constancy_loss: 0.0971 - val_exposure_loss: 0.6184 - val_illumination_smoothness_loss: 0.0491 - val_spatial_constancy_loss: 0.2996 - val_total_loss: 1.0642
Epoch 64/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 67ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7949 - illumination_smoothness_loss: 0.0268 - spatial_constancy_loss: 0.2753 - total_loss: 1.1797 - val_color_constancy_loss: 0.0969 - val_exposure_loss: 0.6199 - val_illumination_smoothness_loss: 0.0460 - val_spatial_constancy_loss: 0.2984 - val_total_loss: 1.0611
Epoch 65/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0826 - exposure_loss: 0.7957 - illumination_smoothness_loss: 0.0254 - spatial_constancy_loss: 0.2748 - total_loss: 1.1785 - val_color_constancy_loss: 0.0976 - val_exposure_loss: 0.6180 - val_illumination_smoothness_loss: 0.0464 - val_spatial_constancy_loss: 0.2998 - val_total_loss: 1.0618
Epoch 66/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7948 - illumination_smoothness_loss: 0.0249 - spatial_constancy_loss: 0.2753 - total_loss: 1.1777 - val_color_constancy_loss: 0.0975 - val_exposure_loss: 0.6189 - val_illumination_smoothness_loss: 0.0448 - val_spatial_constancy_loss: 0.2991 - val_total_loss: 1.0602
Epoch 67/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0825 - exposure_loss: 0.7954 - illumination_smoothness_loss: 0.0241 - spatial_constancy_loss: 0.2750 - total_loss: 1.1770 - val_color_constancy_loss: 0.0977 - val_exposure_loss: 0.6179 - val_illumination_smoothness_loss: 0.0441 - val_spatial_constancy_loss: 0.2998 - val_total_loss: 1.0595
Epoch 68/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7946 - illumination_smoothness_loss: 0.0231 - spatial_constancy_loss: 0.2757 - total_loss: 1.1761 - val_color_constancy_loss: 0.0973 - val_exposure_loss: 0.6198 - val_illumination_smoothness_loss: 0.0410 - val_spatial_constancy_loss: 0.2980 - val_total_loss: 1.0562
Epoch 69/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0826 - exposure_loss: 0.7947 - illumination_smoothness_loss: 0.0226 - spatial_constancy_loss: 0.2752 - total_loss: 1.1752 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6170 - val_illumination_smoothness_loss: 0.0435 - val_spatial_constancy_loss: 0.3003 - val_total_loss: 1.0587
Epoch 70/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7940 - illumination_smoothness_loss: 0.0224 - spatial_constancy_loss: 0.2758 - total_loss: 1.1749 - val_color_constancy_loss: 0.0976 - val_exposure_loss: 0.6182 - val_illumination_smoothness_loss: 0.0414 - val_spatial_constancy_loss: 0.2994 - val_total_loss: 1.0566
Epoch 71/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7941 - illumination_smoothness_loss: 0.0216 - spatial_constancy_loss: 0.2758 - total_loss: 1.1742 - val_color_constancy_loss: 0.0974 - val_exposure_loss: 0.6189 - val_illumination_smoothness_loss: 0.0389 - val_spatial_constancy_loss: 0.2986 - val_total_loss: 1.0538
Epoch 72/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7941 - illumination_smoothness_loss: 0.0211 - spatial_constancy_loss: 0.2755 - total_loss: 1.1734 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6166 - val_illumination_smoothness_loss: 0.0420 - val_spatial_constancy_loss: 0.3005 - val_total_loss: 1.0571
Epoch 73/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7935 - illumination_smoothness_loss: 0.0214 - spatial_constancy_loss: 0.2759 - total_loss: 1.1735 - val_color_constancy_loss: 0.0977 - val_exposure_loss: 0.6172 - val_illumination_smoothness_loss: 0.0401 - val_spatial_constancy_loss: 0.3001 - val_total_loss: 1.0551
Epoch 74/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7935 - illumination_smoothness_loss: 0.0205 - spatial_constancy_loss: 0.2760 - total_loss: 1.1727 - val_color_constancy_loss: 0.0978 - val_exposure_loss: 0.6168 - val_illumination_smoothness_loss: 0.0395 - val_spatial_constancy_loss: 0.3005 - val_total_loss: 1.0546
Epoch 75/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7924 - illumination_smoothness_loss: 0.0204 - spatial_constancy_loss: 0.2764 - total_loss: 1.1721 - val_color_constancy_loss: 0.0977 - val_exposure_loss: 0.6176 - val_illumination_smoothness_loss: 0.0385 - val_spatial_constancy_loss: 0.2997 - val_total_loss: 1.0536
Epoch 76/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7933 - illumination_smoothness_loss: 0.0198 - spatial_constancy_loss: 0.2760 - total_loss: 1.1718 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6166 - val_illumination_smoothness_loss: 0.0376 - val_spatial_constancy_loss: 0.3002 - val_total_loss: 1.0524
Epoch 77/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7925 - illumination_smoothness_loss: 0.0195 - spatial_constancy_loss: 0.2763 - total_loss: 1.1710 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6170 - val_illumination_smoothness_loss: 0.0384 - val_spatial_constancy_loss: 0.2999 - val_total_loss: 1.0532
Epoch 78/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0827 - exposure_loss: 0.7929 - illumination_smoothness_loss: 0.0196 - spatial_constancy_loss: 0.2761 - total_loss: 1.1713 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6170 - val_illumination_smoothness_loss: 0.0369 - val_spatial_constancy_loss: 0.3000 - val_total_loss: 1.0518
Epoch 79/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7922 - illumination_smoothness_loss: 0.0192 - spatial_constancy_loss: 0.2763 - total_loss: 1.1704 - val_color_constancy_loss: 0.0981 - val_exposure_loss: 0.6157 - val_illumination_smoothness_loss: 0.0380 - val_spatial_constancy_loss: 0.3009 - val_total_loss: 1.0527
Epoch 80/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7918 - illumination_smoothness_loss: 0.0191 - spatial_constancy_loss: 0.2766 - total_loss: 1.1703 - val_color_constancy_loss: 0.0980 - val_exposure_loss: 0.6159 - val_illumination_smoothness_loss: 0.0373 - val_spatial_constancy_loss: 0.3004 - val_total_loss: 1.0516
Epoch 81/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7917 - illumination_smoothness_loss: 0.0190 - spatial_constancy_loss: 0.2764 - total_loss: 1.1699 - val_color_constancy_loss: 0.0981 - val_exposure_loss: 0.6153 - val_illumination_smoothness_loss: 0.0373 - val_spatial_constancy_loss: 0.3009 - val_total_loss: 1.0516
Epoch 82/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 66ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7915 - illumination_smoothness_loss: 0.0187 - spatial_constancy_loss: 0.2766 - total_loss: 1.1697 - val_color_constancy_loss: 0.0979 - val_exposure_loss: 0.6170 - val_illumination_smoothness_loss: 0.0348 - val_spatial_constancy_loss: 0.2996 - val_total_loss: 1.0493
Epoch 83/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7918 - illumination_smoothness_loss: 0.0182 - spatial_constancy_loss: 0.2763 - total_loss: 1.1691 - val_color_constancy_loss: 0.0980 - val_exposure_loss: 0.6158 - val_illumination_smoothness_loss: 0.0358 - val_spatial_constancy_loss: 0.3004 - val_total_loss: 1.0500
Epoch 84/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7911 - illumination_smoothness_loss: 0.0184 - spatial_constancy_loss: 0.2766 - total_loss: 1.1689 - val_color_constancy_loss: 0.0982 - val_exposure_loss: 0.6146 - val_illumination_smoothness_loss: 0.0366 - val_spatial_constancy_loss: 0.3010 - val_total_loss: 1.0505
Epoch 85/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7907 - illumination_smoothness_loss: 0.0185 - spatial_constancy_loss: 0.2767 - total_loss: 1.1687 - val_color_constancy_loss: 0.0980 - val_exposure_loss: 0.6154 - val_illumination_smoothness_loss: 0.0361 - val_spatial_constancy_loss: 0.3006 - val_total_loss: 1.0501
Epoch 86/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0828 - exposure_loss: 0.7910 - illumination_smoothness_loss: 0.0182 - spatial_constancy_loss: 0.2765 - total_loss: 1.1685 - val_color_constancy_loss: 0.0982 - val_exposure_loss: 0.6145 - val_illumination_smoothness_loss: 0.0356 - val_spatial_constancy_loss: 0.3009 - val_total_loss: 1.0492
Epoch 87/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7902 - illumination_smoothness_loss: 0.0181 - spatial_constancy_loss: 0.2767 - total_loss: 1.1680 - val_color_constancy_loss: 0.0981 - val_exposure_loss: 0.6149 - val_illumination_smoothness_loss: 0.0357 - val_spatial_constancy_loss: 0.3007 - val_total_loss: 1.0494
Epoch 88/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7904 - illumination_smoothness_loss: 0.0180 - spatial_constancy_loss: 0.2766 - total_loss: 1.1679 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6133 - val_illumination_smoothness_loss: 0.0359 - val_spatial_constancy_loss: 0.3015 - val_total_loss: 1.0491
Epoch 89/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0830 - exposure_loss: 0.7893 - illumination_smoothness_loss: 0.0181 - spatial_constancy_loss: 0.2770 - total_loss: 1.1674 - val_color_constancy_loss: 0.0981 - val_exposure_loss: 0.6148 - val_illumination_smoothness_loss: 0.0350 - val_spatial_constancy_loss: 0.3006 - val_total_loss: 1.0484
Epoch 90/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7901 - illumination_smoothness_loss: 0.0178 - spatial_constancy_loss: 0.2765 - total_loss: 1.1673 - val_color_constancy_loss: 0.0984 - val_exposure_loss: 0.6128 - val_illumination_smoothness_loss: 0.0358 - val_spatial_constancy_loss: 0.3017 - val_total_loss: 1.0487
Epoch 91/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0831 - exposure_loss: 0.7886 - illumination_smoothness_loss: 0.0181 - spatial_constancy_loss: 0.2771 - total_loss: 1.1669 - val_color_constancy_loss: 0.0981 - val_exposure_loss: 0.6142 - val_illumination_smoothness_loss: 0.0351 - val_spatial_constancy_loss: 0.3007 - val_total_loss: 1.0481
Epoch 92/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0829 - exposure_loss: 0.7895 - illumination_smoothness_loss: 0.0177 - spatial_constancy_loss: 0.2766 - total_loss: 1.1668 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6133 - val_illumination_smoothness_loss: 0.0349 - val_spatial_constancy_loss: 0.3011 - val_total_loss: 1.0476
Epoch 93/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0831 - exposure_loss: 0.7884 - illumination_smoothness_loss: 0.0179 - spatial_constancy_loss: 0.2770 - total_loss: 1.1664 - val_color_constancy_loss: 0.0984 - val_exposure_loss: 0.6125 - val_illumination_smoothness_loss: 0.0355 - val_spatial_constancy_loss: 0.3014 - val_total_loss: 1.0478
Epoch 94/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 65ms/step - color_constancy_loss: 0.0831 - exposure_loss: 0.7882 - illumination_smoothness_loss: 0.0181 - spatial_constancy_loss: 0.2769 - total_loss: 1.1663 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6128 - val_illumination_smoothness_loss: 0.0349 - val_spatial_constancy_loss: 0.3012 - val_total_loss: 1.0473
Epoch 95/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0831 - exposure_loss: 0.7881 - illumination_smoothness_loss: 0.0179 - spatial_constancy_loss: 0.2770 - total_loss: 1.1660 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6130 - val_illumination_smoothness_loss: 0.0341 - val_spatial_constancy_loss: 0.3009 - val_total_loss: 1.0462
Epoch 96/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0832 - exposure_loss: 0.7874 - illumination_smoothness_loss: 0.0179 - spatial_constancy_loss: 0.2771 - total_loss: 1.1656 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6125 - val_illumination_smoothness_loss: 0.0353 - val_spatial_constancy_loss: 0.3010 - val_total_loss: 1.0471
Epoch 97/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0830 - exposure_loss: 0.7882 - illumination_smoothness_loss: 0.0181 - spatial_constancy_loss: 0.2765 - total_loss: 1.1658 - val_color_constancy_loss: 0.0984 - val_exposure_loss: 0.6120 - val_illumination_smoothness_loss: 0.0346 - val_spatial_constancy_loss: 0.3014 - val_total_loss: 1.0464
Epoch 98/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 63ms/step - color_constancy_loss: 0.0832 - exposure_loss: 0.7869 - illumination_smoothness_loss: 0.0180 - spatial_constancy_loss: 0.2772 - total_loss: 1.1653 - val_color_constancy_loss: 0.0984 - val_exposure_loss: 0.6118 - val_illumination_smoothness_loss: 0.0344 - val_spatial_constancy_loss: 0.3012 - val_total_loss: 1.0458
Epoch 99/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0832 - exposure_loss: 0.7863 - illumination_smoothness_loss: 0.0182 - spatial_constancy_loss: 0.2772 - total_loss: 1.1650 - val_color_constancy_loss: 0.0983 - val_exposure_loss: 0.6120 - val_illumination_smoothness_loss: 0.0343 - val_spatial_constancy_loss: 0.3007 - val_total_loss: 1.0453
Epoch 100/100
25/25 ━━━━━━━━━━━━━━━━━━━━ 2s 64ms/step - color_constancy_loss: 0.0831 - exposure_loss: 0.7873 - illumination_smoothness_loss: 0.0180 - spatial_constancy_loss: 0.2765 - total_loss: 1.1649 - val_color_constancy_loss: 0.0984 - val_exposure_loss: 0.6115 - val_illumination_smoothness_loss: 0.0341 - val_spatial_constancy_loss: 0.3011 - val_total_loss: 1.0451



推论
def plot_results(images, titles, figure_size=(12, 12)):
fig = plt.figure(figsize=figure_size)
for i in range(len(images)):
fig.add_subplot(1, len(images), i + 1).set_title(titles[i])
_ = plt.imshow(images[i])
plt.axis("off")
plt.show()
def infer(original_image):
image = keras.utils.img_to_array(original_image)
image = image.astype("float32") / 255.0
image = np.expand_dims(image, axis=0)
output_image = zero_dce_model(image)
output_image = tf.cast((output_image[0, :, :, :] * 255), dtype=np.uint8)
output_image = Image.fromarray(output_image.numpy())
return output_image测试图像推理
我们将通过 MIRNet 增强的 LOLDataset 测试图像与通过 PIL.ImageOps.autocontrast() 函数增强的图像进行了比较。
您可以使用 Hugging Face Hub 上托管的训练有素的模型,并在 Hugging Face Spaces 上尝试演
for val_image_file in test_low_light_images:
original_image = Image.open(val_image_file)
enhanced_image = infer(original_image)
plot_results(
[original_image, ImageOps.autocontrast(original_image), enhanced_image],
["Original", "PIL Autocontrast", "Enhanced"],
(20, 12),
)


![[Swift]单元测试](https://img-blog.csdnimg.cn/direct/e652771ba1434342a5d00119419ea774.png)