课题名称:
基于标准A星算法+平滑度优化的无人机三维地图路径规划
版本时间:
2024-04-22
程序运行:
直接运行AStar.m 文件即可
代码获取方式:
QQ:491052175
VX:Matlab_Lover
特殊说明:
地图创建可直接使用标准地图或者用户自定义地图尺寸随机生成地图
仿真结果:
图1 标准A星求解三维地图无人机路径规划
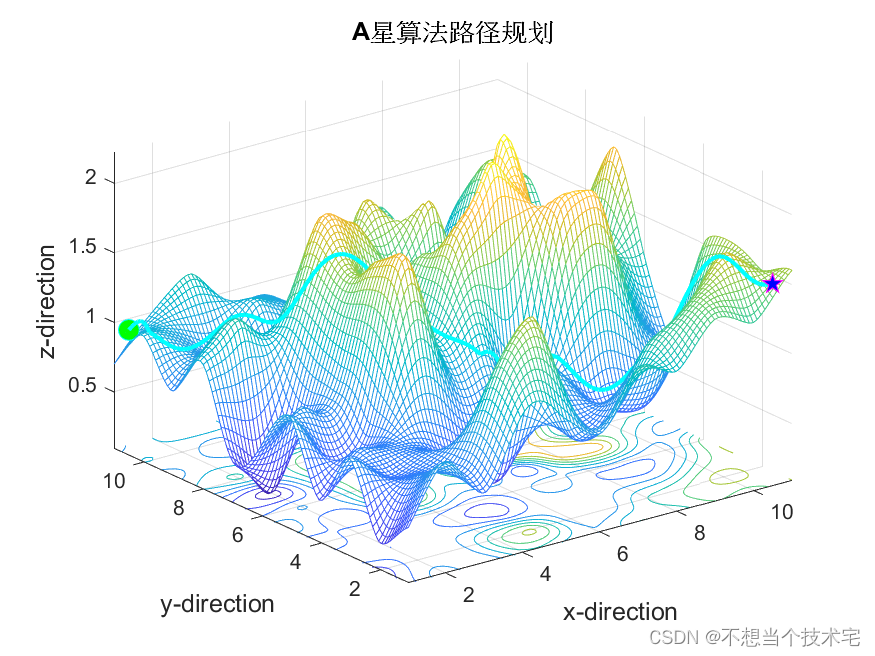
图2 平滑度优化的标准A星求解三维地图无人机路径规划

图3 平滑度优化前后的路径对比图
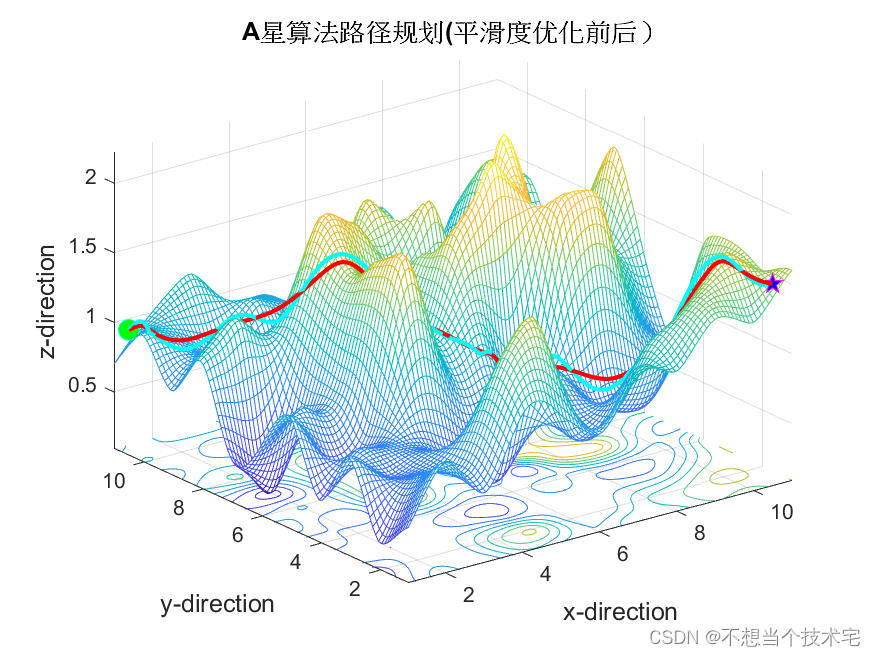
图4 仿真运行结果

基于标准A星算法+平滑度优化的无人机三维地图路径规划
2024-04-22
直接运行AStar.m 文件即可
QQ:491052175
VX:Matlab_Lover
地图创建可直接使用标准地图或者用户自定义地图尺寸随机生成地图
图1 标准A星求解三维地图无人机路径规划
图2 平滑度优化的标准A星求解三维地图无人机路径规划
图3 平滑度优化前后的路径对比图
图4 仿真运行结果
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1617015.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!