项目准备:
orangepi02
语言 模块: SU-03T
电脑
接线:
语言模块 - orangepi
VCC - 5V
GND - GND
B7(RX)--RX-5orangepi 手机 通过usb 连接
实现思路图:
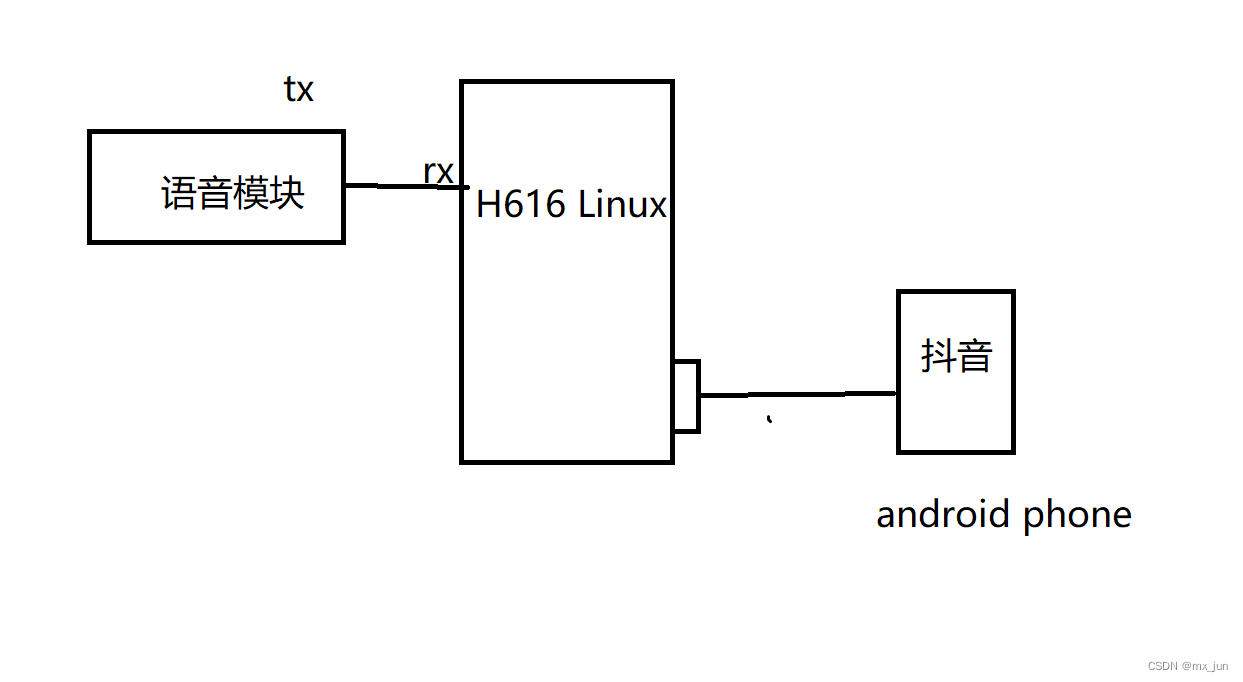
语言模块接收到语言信息,发送到 H616 去处理,H616再控制手机实现语言刷抖音的功能
======================
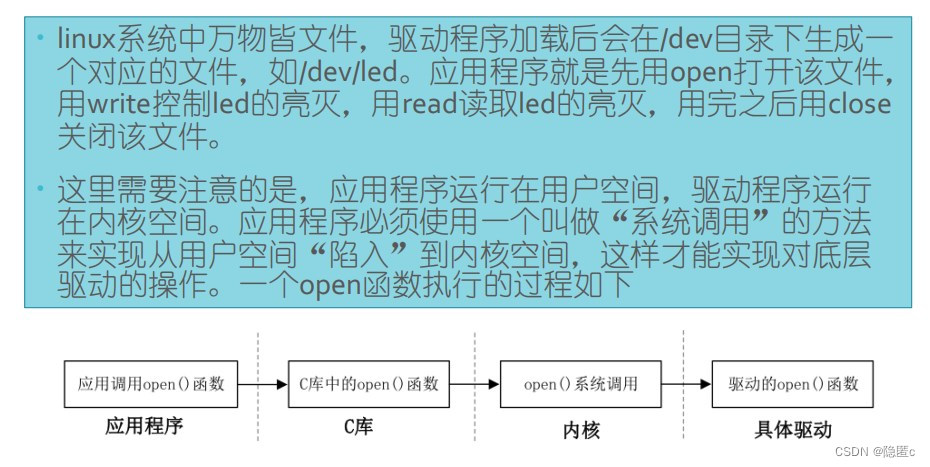
插入手机后,使用 指令: dmesg -- 查看信息:
//手机的内核(安卓的底层实现)也是linux实现的
先下载adb: sudo apt-get install adb
再使用adb下的命令得到手机编号:
adb -- Android 调试桥 (Android Debug Bridge )
adb devices
adb shell -- 需要手机 的授权 “USB调试”
项目代码:
//同步在资源中
muUart.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include<pthread.h>
#include "uartTool.h"
int fd;
void *readSerial()
{
char cmd;
while(1){
cmd=myserialGetchar(fd);
printf("GET->0x%c\n",cmd);
switch(cmd){
case 'N':
puts("next");
system("adb shell input swipe 540 1300 540 500 100");
break;
case 'P':
puts("pre");
system("adb shell input swipe 540 500 540 1300 100");
break;
case 'Z':
puts("zan");
system("adb shell \"seq 2 | while read i;do input tap 350 1050 & input tap 350 1050 &sleep 0.03;done;\"");
break;
case 'Q':
puts("quit");
system("adb shell input keyevent 26");
break;
}
}
}
void *sendSerial()
{
char buf[32];
while(1){
memset(buf,'\0',sizeof(buf));
scanf("%s",buf);
serialsendString(fd,buf);
}
}
int main(int argc,char **argv)
{
char deviceName[32]={'\0'};
pthread_t readt;
if(argc<2){
printf("uage:%s /dev/ttyS?\n",argv[0]);
return -1;
}
strcpy(deviceName,argv[1]);
if((fd=myserialOpen(deviceName,115200))==-1){
printf("open %s error\n",deviceName);
return -1;
}
pthread_create(&readt,NULL,readSerial ,NULL);
while(1)
{
sleep(10);
}
return 0;
}
uartTool.c
#include <stdio.h>
#include <stdlib.h>
#include <stdint.h>
#include <stdarg.h>
#include <string.h>
#include <termios.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#include "wiringSerial.h"
char myserialGetchar (const int fd)
{
char x ;
if (read (fd, &x, 1) != 1)
return -1 ;
return x;
}
int myserialOpen (const char *device, const int baud)
{
struct termios options ;
speed_t myBaud ;
int status, fd ;
switch (baud)
{
case 9600: myBaud = B9600 ; break ;
case 115200: myBaud = B115200 ; break ;
}
if ((fd = open (device, O_RDWR | O_NOCTTY | O_NDELAY | O_NONBLOCK)) == -1)
return -1 ;
fcntl (fd, F_SETFL, O_RDWR) ;
// Get and modify current options:
tcgetattr (fd, &options) ;
cfmakeraw (&options) ;
cfsetispeed (&options, myBaud) ;
cfsetospeed (&options, myBaud) ;
options.c_cflag |= (CLOCAL | CREAD) ;
options.c_cflag &= ~PARENB ;
options.c_cflag &= ~CSTOPB ;
options.c_cflag &= ~CSIZE ;
options.c_cflag |= CS8 ;
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG) ;
options.c_oflag &= ~OPOST ;
options.c_cc [VMIN] = 0 ;
options.c_cc [VTIME] = 100 ; // Ten seconds (100 deciseconds)
tcsetattr (fd, TCSANOW, &options) ;
ioctl (fd, TIOCMGET, &status);
status |= TIOCM_DTR ;
status |= TIOCM_RTS ;
ioctl (fd, TIOCMSET, &status);
usleep (10000) ; // 10mS
return fd ;
}
void serialsendString (const int fd, const char* s)
{
int ret;
ret=write(fd,s,strlen(s));
if(ret<0)
printf("Serial Puts Error\n");
}
int serialgetString (const int fd, char* buffer)
{
int n_read;
n_read=read(fd,buffer,32);
return n_read;
}
uartTool.h
int myserialOpen (const char *device, const int baud);
void serialsendString (const int fd, const char* s);
int serialgetString (const int fd, char* buffer);
char myserialGetchar (const int fd);
操作步骤:
1.按接线要求 接好线 (注意我们代码接的是串口5 ,波特率115200)
2.编译: gcc myUart.c uartTool.c -lpthread
3. 运行 ./a.out /dev/ttyS5




![OpenHarmony其他工具类—leveldb [GN编译]](https://img-blog.csdnimg.cn/img_convert/48b1e7eff01309fe163e3e6dcf6fba55.webp?x-oss-process=image/format,png)
