原文链接:https://www.techbeat.net/article-info?id=4468
作者:seven_
现阶段,人类探索宇宙的一个关键方向是如何高效的利用航天器返回的数据来了解和分析外太空的环境特点。其中最为常用的就是图像数据,但是这些数据非常宝贵,获取难度较大,信息传输成本也非常高。但是与地质学家研究地球环境的方式不同,现阶段我们对太空环境的探索还离不开对三维场景的模拟。本文研究的重点就是如何使用来自火星车上的相机数据生成火星表面的3D场景,以帮助研究火星地质,进行模拟导航和火星形状分析。目前可以实现火星表面三维重建的技术大多都依赖于经典的计算机图形学,这类方法在重建过程中需要耗费大量的计算资源,而且很难推广到新的场景和不同火星车采集的数据中。
论文链接:
https://arxiv.org/abs/2212.01672
代码链接:
https://github.com/lrnzgiusti/MaRF
神经辐射场(NeRFs)作为最近几年3D计算机视觉社区中最为火热的话题,可以非常有效地应对上述火星表面重建的限制。我们可以通过使用稀疏的采集图像优化连续场景函数来合成复杂的火星场景,作者将这一方法命名为MaRF。MaRF使用神经图形基元(NGP)代替了原有技术中的稀疏图像集,由于NGP可以被视为是一组固定长度的可学习向量,它可以以更小的空间来保存原始图像的信息,从而提高了三维重建的效率。
此外,本文作者在实验部分展示了使用MaRF对来自好奇号火星车、毅力号火星车和Ingenuity火星直升机采集到的真实火星数据的三维环境生成效果,这也算得上是3D NeRFs技术助力太空探索的一大步,本文作者主要来自于美国宇航局喷气推进实验室(NASA JPL),JPL主要承担了美国宇航局的火星科学实验室项目。
一、介绍
为了能够使研究者更加全面的观察外太空的地形地貌,已经有人想到将混合现实(mixed reality,MR)技术应用到该领域,混合现实是一种新型的人机交互形式,它将交互式计算机图形环境与现实世界中的元素相结合,完全通过计算机生成的环境信号重建整个感官世界。混合现实将计算机生成的感官信号叠加到实际环境中,使用户能够同时体验虚拟世界和现实世界的结合。基于混合现实技术,美国宇航局戈达德太空飞行中心(GSFC)的研究人员开发了一种沉浸式工具,用于探索从海洋深处到遥远恒星和星系的区域。另外值得注意的一项技术是NASA JPL实验室(喷气推进实验室)和微软联合研发的OnSight框架[1,2],该框架可以对好奇号火星车访问过的每一个火星地点生成非常逼真的3D地形模型,并且允许科学家们以增强现实的形式在这些虚拟空间中对火星地质进行研究,真正实现了空地合一的勘探体验,如下图所示:
在这样的技术发展背景之下,本文作者研发出一个更加先进的端到端三维重建框架MaRF,MaRF可以直接从JPL实验室的行星数据系统(Planetary Data System,PDS)获取航天器采集到的火星图像数据,并且对其进行过滤以合成火星场景的综合视图。MaRF借助深度3D渲染算法的非线性拟合能力,可以更好的捕捉三维场景的几何和外观信息,能够合成模型从未见过的火星视角,这是之前传统方法望而却步的一点。此外,由于整个火星场景都可以被编码在MaRF的多层感知器(MLP)中,这样占用的存储空间比单个PDS数据结构要小几个数量级,因此MaRF也可以被作为存储火星航天器数据的数据中心,其可以同时保留与原始图像集相同的信息内容。
二、本文方法
MaRF的技术基础来源于3D NeRF算法,在NeRF中,一个三维场景由一系列的MLP表示,给定一个虚拟物体的3D空间坐标
r
=
(
x
,
y
,
z
)
\mathbf{r}=(x, y, z)
r=(x,y,z) 和在场景中的被观察方向
d
=
(
θ
,
ϕ
)
d=(\theta, \phi)
d=(θ,ϕ),MLP对当前目标的体积密度
σ
\sigma
σ、颜色
c
=
[
R
,
G
,
B
]
\mathbf{c}=[R, G, B]
c=[R,G,B] 进行预测并在该空间位置进行体积渲染,在具体操作时,首先将空间坐标
r
\mathbf{r}
r 送入MLP,输出
σ
\sigma
σ 和中间特征,然后将其送入到全连接层中预测颜色,整个过程可以形式化表示为:

其中
Θ
\Theta
Θ 是可学习参数,我们可以通过最小化不同视图中渲染和真实像素颜色之间的总平方误差来训练网络。基于这一原理过程,本文作者设计了如下的火星三维场景渲染Pipeline,该Pipeline可以从行星数据系统(PDS)直接获取可用的航天器图像来训练NeRF网络进行视图合成。

整个Pipeline共分为提取数据、过滤、校准、优化和视图合成5个阶段,下面我们将详细介绍每个阶段中的一些技术细节。
2.1 提取数据
在这一阶段中,系统可以直接通过指定火星图像的绝对路径来从PDS中读取图像,其中每张图像都附带一个相关的标签文件,其中包括航天器系统、拍摄图像的时间和CAHVOR格式的相机参数(内参和外参)等指标。
2.2 数据过滤
三维场景渲染的效果很大程度上取决于输入网络的数据质量,直接从PDS访问到的火星图像可能具有不同的分辨率,甚至包含有噪声图片。因此,在训练视图合成之前,数据集首先通过一组过滤器进行筛选,筛选标准包括以下几个方面:(a)文件维度,(b) 图像形状,(c)滤色器,(d)灰度,(e)颜色直方图,(f)模糊检测。
其中前两个过滤器直接使用阈值进行参数化,即如果图像的存储大小小于
β
\beta
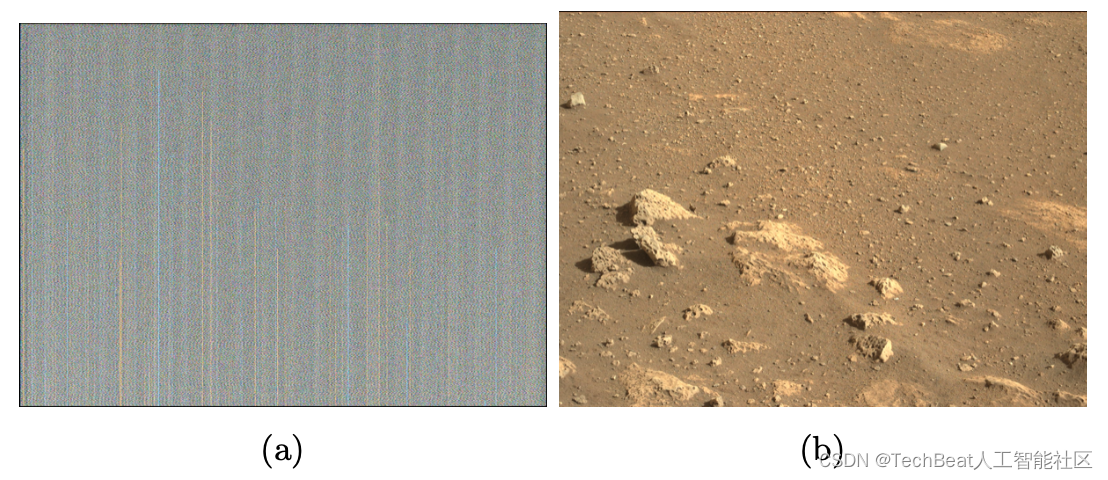
β 或图像形状太小,就直接将其删除。滤色器(c)利用感知哈希函数来识别具有相近哈希值的照片,并删除环境相同但滤色器不同的图像。灰度过滤器(d)和颜色直方图(e)的负责将灰度值和彩色直方图异常的图像进行删除。之所以采用这种方法是因为火星的图像通常具有一致的颜色通道值(如下图b),而噪声图像将具有截然不同的颜色直方图(例如航天器的故障图像,如下图a)。模糊检测过滤器(f)使用图像的拉普拉斯算子的方差进行检测,它在数值上决定了图像的清晰度。通过设置锐度阈值
τ
\tau
τ 可以直接过滤掉锐度值小于
τ
\tau
τ 的所有图像。
2.3 数据校准
在数据获取阶段,对于每张图像都会提供CAHVOR格式的相机参数,包括内部参数和外部参数。这些参数在训练NeRF网络时需要通过相机投影矩阵的形式进行表示:

其中
R
R
R 是3×3旋转矩阵,
I
I
I 是3×1单位矩阵,
t
t
t 是3×2平移向量,
K
K
K 是摄像机校准矩阵,定义如下:
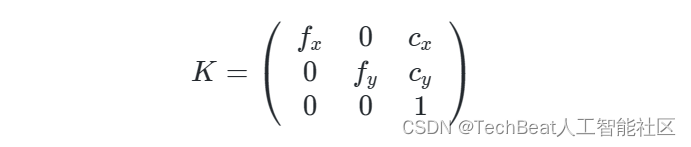
这里,
K
K
K 包含固有的相机参数,其中
f
x
f_{x}
fx 和
f
y
f_{y}
fy 是相机的焦距。
c
x
c_{x}
cx 和
c
y
c_{y}
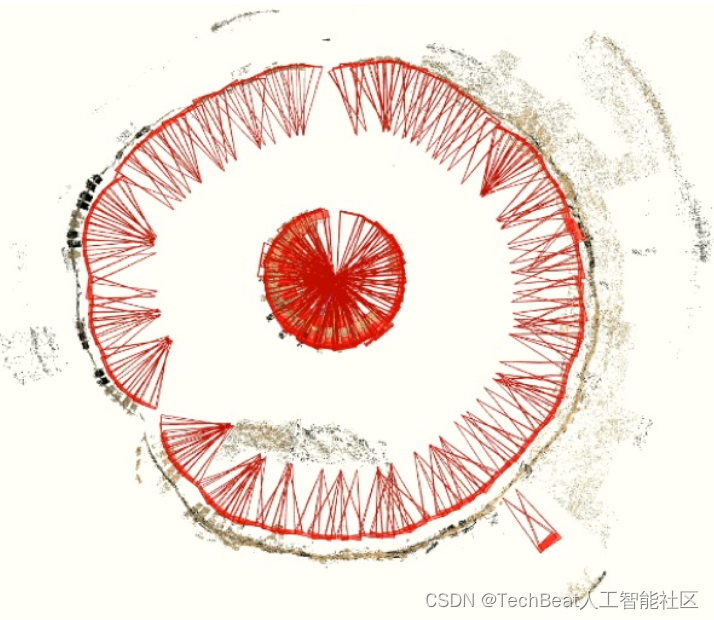
cy 是主点距图像左上角的偏移。尽管目前已有将CAHVOR参数转换为针孔相机参数的技术,但其需要一些其他特殊的参数,这对于PDS系统来说仍然有一定的难度,因此这里作者使用运动结构(SfM)算法来对图像进行校准,校准过程的结果如下图所示。
2.4 优化
对于MaRF网络的超参数,作者使用随机搜索的方式来确定。网络整体的优化目标通过定量测定一组图像
{
I
j
}
j
=
1
N
\left\{I_{j}\right\}_{j=1}^{N}
{Ij}j=1N 所描述的基础场景与一组渲染图像
{
I
^
j
}
j
=
1
N
\left\{\hat{I}_{j}\right\}_{j=1}^{N}
{I^j}j=1N 所组成的视图合成效果
S
^
\hat{\mathcal{S}}
S^ 之间的峰值信噪比来确定。具体来说,对于单个图像,其GT效果与合成效果之间的PSNR计算方式如下:
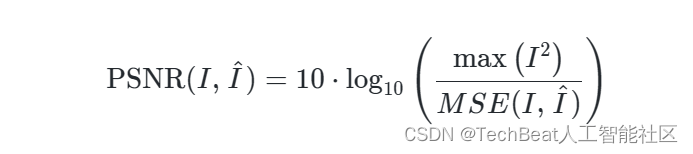
其中,
MSE
(
I
,
I
^
)
=
(
I
−
I
^
)
2
W
⋅
H
⋅
C
\text{MSE}(I, \hat{I})=\frac{(I-\hat{I})^{2}}{W \cdot H \cdot C}
MSE(I,I^)=W⋅H⋅C(I−I^)2 。然后,为了获得
S
S
S 和
S
^
\hat{\mathcal{S}}
S^ 之间的峰值信噪比,作者计算组成场景的图像的峰值信噪比的平均值。
2.5 视图合成
作者在本文中主要使用了三种不同来源的火星表面图像数据集进行实验评估,其中包括:
- 好奇号火星探测器的科学相机
- Ingenuity火星直升机的彩色摄像头
- 毅力号火星车的Mastcam-Z
作者对这三种数据源进行了实验对比,主要对比了MaRF在这三种数据集上训练10秒到15分钟后的RSNR值,对比结果如下表所示。
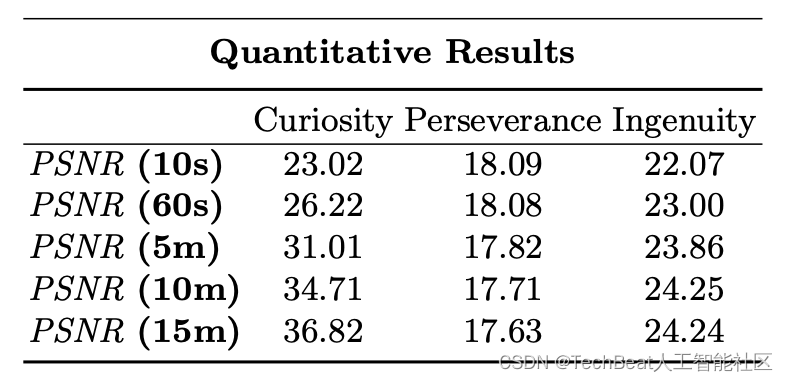
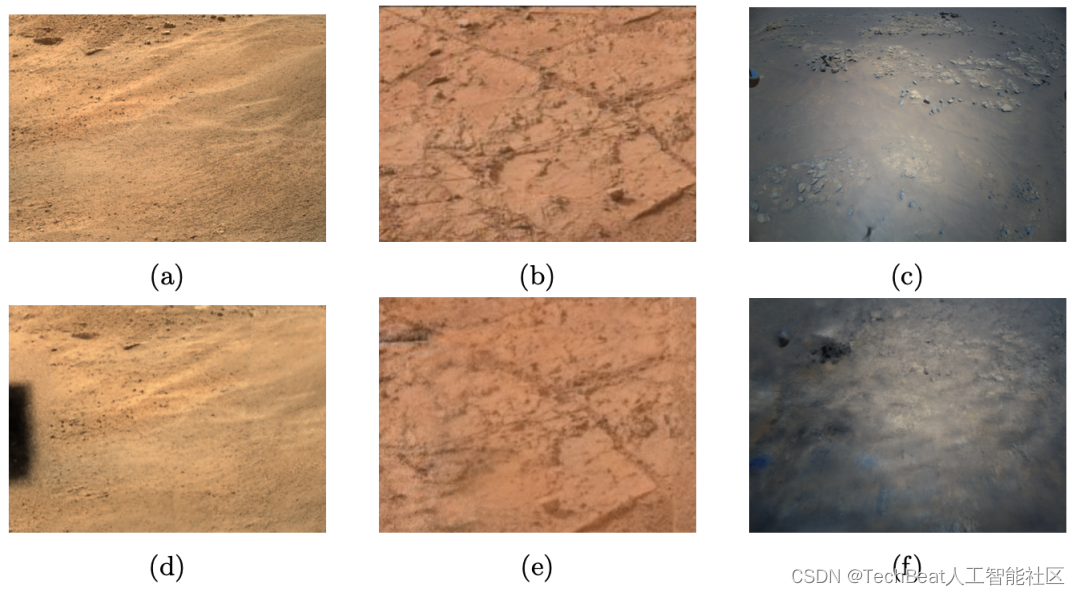
下图同步展示了MaRF对这三种数据源的视图合成效果,从上表中我们可以观察到,对于毅力号火星车Mastcam-Z数据集,MaRF的RSNR值会随着训练时间的延长而降低,作者解释说导致这一现象的原因是因为其中涉及到的相机模型发生了轻微错位导致视图合成时出现了一些噪声黑点,如下图(d)中所示,但是这不会影响整体的重建质量。
三、总结
本文算得上是一项3D视觉技术的跨界之作,作者针对火星勘探任务提出了一个端到端的NeRF神经渲染框架MaRF,MaRF能够利用神经辐射场直接将行星数据系统(PDS)上的航天器图像渲染成为火星表面的合成视图。整体的渲染过程包括对数据的获取、过滤、矫正、优化和视图合成,工作流较为成熟。此外,作者已经在三个不同的真实航天器数据集上对MaRF技术进行了评估,均达到了非常好的效果。作者认为,MaRF是一项真正实现了混合现实与人工智能交叉融合的新兴技术,如果能够将MaRF及其一系列3D视觉工具应用在未来的太空勘探任务中,科学家们会在太空协作探索、行星地质勘察以及更好的感知人类尚未接触过的遥远星系等方面获得更大的科研成果。
参考
[1] Abercrombie, S.P., Menzies, A., Winter, A., Clausen, M., Duran, B., Jorritsma, M., Goddard, C., Lidawer, A.: Onsight: Multi-platform visualization of the surface of mars. In: AGU Fall Meeting Abstracts. vol. 2017, pp. ED11C–0134 (2017)
[2] Beaton, K.H., Chappell, S.P., Menzies, A., Luo, V., Kim-Castet, S.Y., Newman, D., Hoffman, J., Norheim, J., Anandapadmanaban, E., Abercrombie, S.P., et al.: Mission enhancing capabilities for science-driven exploration extravehicular activ- ity derived from the nasa basalt research program. Planetary and Space Science 193, 105003 (2020)
Illustration by Pixel True from IconScout
-The End-
关于我“门”
▼
将门是一家以专注于发掘、加速及投资技术驱动型创业公司的新型创投机构,旗下涵盖将门创新服务、将门-TechBeat技术社区以及将门创投基金。
将门成立于2015年底,创始团队由微软创投在中国的创始团队原班人马构建而成,曾为微软优选和深度孵化了126家创新的技术型创业公司。
如果您是技术领域的初创企业,不仅想获得投资,还希望获得一系列持续性、有价值的投后服务,欢迎发送或者推荐项目给我“门”:
bp@thejiangmen.com