文章会对本书第五章节及以后章节进行总结概括。每日更新一部分。一起读书吧。
第五章——基础点云处理
重点:点云的相邻关系是许多算法的基础
5.1 激光雷达传感器与点云的数学模型
5.1.1激光雷达传感器的数学模型
雷达有两种:机械旋转式激光雷达;固态激光雷达
单个激光探头可测量:某空间点离自身的距离,记作 r
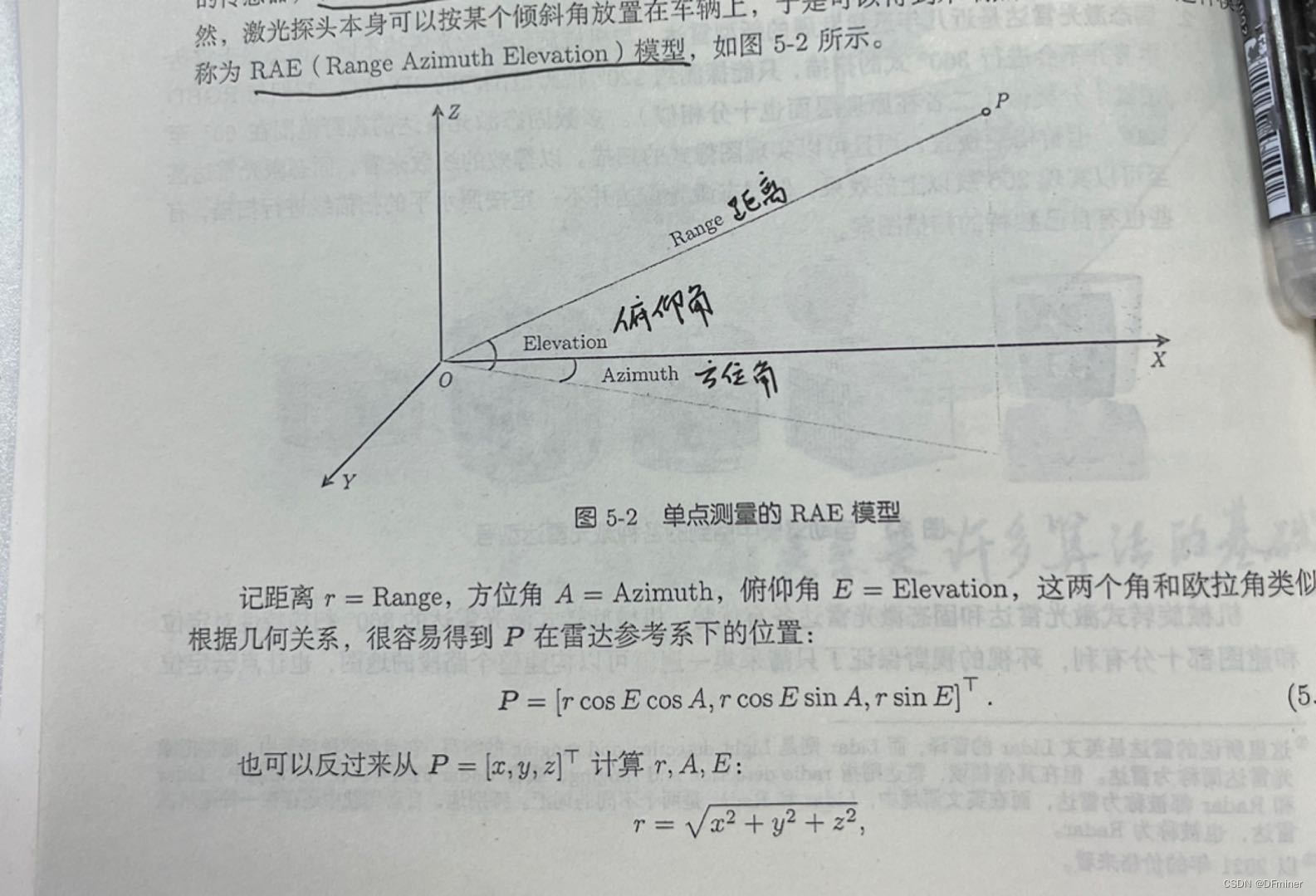
RAE模型—— 距离 r , 方位角 A (水平的航向角),俯仰角 E

5.1.2 点云的表达
(留个悬念:在很多算法里我们会问:离某个点最近的是哪个点?这个点和周边的点一起呈现了什么形状?为了实现这些功能,我们必须引入一些特殊的数据结构)
我们存储点云信息,最方便是定义点云结构体
可储存的信息除了点云的x,y,z坐标,还有反射率,所属线束,RGB颜色信息。
来自RGBD相机的点云,还可以储存每个点在图像中的行数和列数信息。
还有整个点云的位置和姿态等。
5.1.3 Packet的表达
雷达与计算机通过udp通讯,包里面有用的信息有两个:物体的探测距离与反射率。
不过对算法来说,我们还是更希望直接访问每个点的坐标,所以Packet通常作为压缩后的数据,在驱动程序,原始传感器数据包或者地图压缩等模块中使用。
5.1.4 俯视图和距离图

俯视图干什么用?
很多规划算法如A*,D*等,需要用栅格地图来规划,点云转栅格,得到的栅格地图就是俯视图,在转栅格之后,大部分的障碍物信息都可以的到有效的保留,但某些动态物体在地图中出现了拖影现象。第六章会介绍栅格地图的概率机制,可以有效抑制动态物体的影响。
距离图干什么用?
距离图,取图像的横坐标为激光雷达的方向角,纵坐标为俯仰角,这种投影为距离图。
我们可以从距离图中提取出垂直方向上的物体作为定位的特征。比如哪些是地面,哪些是杆子。
5.2最近邻问题
最紧邻问题的描述:
待续...每日更新