目录
一、 模块介绍
1.1 简介
1.2 协议
二、 驱动代码
三、 应用代码
四、 实验
五、 程序优化
一、 模块介绍
1.1 简介
红外遥控被广泛应用于家用电器、工业控制和智能仪器系统中,像我们熟知的有电视机盒子遥控器、空调遥控器。红外遥控器系统分为发送端和接收端,如图下图所示。

发送端就是红外遥控器,上面有许多按键,当我们按下遥控器按键时,遥控器内部电路会进行编码和调制,再通过红外发射头,将信号以肉眼不可见的红外线发射出去。红外线线虽然肉眼不可见,但可以通过手机摄像头看到,常用该方法检查遥控器是否正常工作。接收端是一个红外接收头,收到红外信号后,内部电路会进行信号放大和解调,再将数据传给板子上的 GPIO,板子收到数据后再解码才能确定是哪个按键被按下。


1.2 协议
我们按下遥控器按键的时候,遥控器自动发送某个红外信号,接收头接收到红外信号,然后把红外信号转换成电平信号,通过 IRD 这根线,传给 SOC。整个传输,只涉及单向传输,由 HS0038 向主芯片传送。因此,我们只需要编写程序,从 IRD 上获取数据即可,在这之前,我们需要先了解下数据是怎么表示的,也就是传输的红外数据的格式。
红外协议有: NEC、 SONY、 RC5、 RC6 等,常用的就是 NEC 格式,因此我们主要对 NEC 进行讲解。在分析文章中的波形之前,我们先想象一下怎么在一条数据线上传输信号。开始传输数据之前,一般都会发出一个 start 起始信号,通知对方我开始传输数据了,后面就是每一位每一位的数据。NEC 协议的开始是一段引导码

这个引导码由一个 9ms 的低脉冲加上一个 4.5ms 的高脉冲组成,它用来通知接收方我要开始传输数据了。

然后接着的是数据,数据由 4 字节组成:地址、地址(取反)、数据、数据(取反),取反是用来校验用的。地址是指遥控器的 ID,每一类遥控器的 ID 都不一样,这样就可以防止操控电视的遥控器影响空调。数据就是遥控器上的不同按键值。从前面的图可以知道, NEC 每次要发 32 位(地址、地址取反、数据、数据取反,每个 8 位)的数据。数据的 1 和 0,开始都是 0.56ms 的低脉冲,对于数据 1,后面的高脉冲比较长,对于数据 0,后面的高脉冲比较短。

第一次按下按键时,它会发出引导码,地址,地址取反,数据,数据取反。
如果这时还没松开按键,这就是“长按”,怎么表示“长按”?遥控器会发送一个不一样的引导码,这个引导码由 9ms 的低脉冲, 2.25ms 的高脉冲组成,表示现在按的还是上次一样的按键,也叫连发码,它会一直发送,直到松开

二、 驱动代码
#include "asm-generic/errno-base.h"
#include "linux/jiffies.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_desc{
int gpio;
int irq;
char *name;
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc gpios[] = {
{115, 0, "irda", },
};
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static unsigned char g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
static u64 g_irda_irq_times[68];
static int g_irda_irq_cnt = 0;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void)
{
return (r == w);
}
static int is_key_buf_full(void)
{
return (r == NEXT_POS(w));
}
static void put_key(unsigned char key)
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static unsigned char get_key(void)
{
unsigned char key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{
/* 超时 */
g_irda_irq_cnt = 0;
put_key(-1);
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t irda_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
unsigned char kern_buf[2] ;
int err;
if (size != 2)
return -EINVAL;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty());
kern_buf[0] = get_key(); /* device */
kern_buf[1] = get_key(); /* data */
if (kern_buf[0] == (unsigned char)-1 && kern_buf[1] == (unsigned char)-1)
return -EIO;
err = copy_to_user(buf, kern_buf, 2);
return 2;
}
static unsigned int irda_poll(struct file *fp, poll_table * wait)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
poll_wait(fp, &gpio_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int irda_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = irda_read,
.poll = irda_poll,
.fasync = irda_fasync,
};
static void parse_irda_datas(void)
{
u64 time;
int i;
int m, n;
unsigned char datas[4];
unsigned char data = 0;
int bits = 0;
int byte = 0;
/* 1. 判断前导码 : 9ms的低脉冲, 4.5ms高脉冲 */
time = g_irda_irq_times[1] - g_irda_irq_times[0];
if (time < 8000000 || time > 10000000)
{
goto err;
}
time = g_irda_irq_times[2] - g_irda_irq_times[1];
if (time < 3500000 || time > 55000000)
{
goto err;
}
/* 2. 解析数据 */
for (i = 0; i < 32; i++)
{
m = 3 + i*2;
n = m+1;
time = g_irda_irq_times[n] - g_irda_irq_times[m];
data <<= 1;
bits++;
if (time > 1000000)
{
/* 得到了数据1 */
data |= 1;
}
if (bits == 8)
{
datas[byte] = data;
byte++;
data = 0;
bits = 0;
}
}
/* 判断数据正误 */
datas[1] = ~datas[1];
datas[3] = ~datas[3];
if ((datas[0] != datas[1]) || (datas[2] != datas[3]))
{
printk("data verify err: %02x %02x %02x %02x\n", datas[0], datas[1], datas[2], datas[3]);
goto err;
}
put_key(datas[0]);
put_key(datas[2]);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
return;
err:
g_irda_irq_cnt = 0;
put_key(-1);
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
u64 time;
/* 1. 记录中断发生的时刻 */
time = ktime_get_ns();
g_irda_irq_times[g_irda_irq_cnt] = time;
/* 2. 累计中断次数 */
g_irda_irq_cnt++;
/* 3. 次数达标后, 删除定时器, 解析数据, 放入buffer, 唤醒APP */
if (g_irda_irq_cnt == 68)
{
parse_irda_datas();
del_timer(&gpio_desc->key_timer);
g_irda_irq_cnt = 0;
}
/* 4. 启动定时器 */
mod_timer(&gpio_desc->key_timer, jiffies + msecs_to_jiffies(100));
return IRQ_HANDLED;
}
/* 在入口函数 */
static int __init irda_init(void)
{
int err;
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
for (i = 0; i < count; i++)
{
gpios[i].irq = gpio_to_irq(gpios[i].gpio);
setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);
//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);
err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);
}
/* 注册file_operations */
major = register_chrdev(0, "100ask_irda", &gpio_key_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "100ask_irda_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "irda"); /* /dev/irda */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit irda_exit(void)
{
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "100ask_irda");
for (i = 0; i < count; i++)
{
free_irq(gpios[i].irq, &gpios[i]);
del_timer(&gpios[i].key_timer);
}
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(irda_init);
module_exit(irda_exit);
MODULE_LICENSE("GPL");
三、 应用代码
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <unistd.h>
#include <stdio.h>
#include <string.h>
#include <poll.h>
#include <signal.h>
static int fd;
/*
* ./button_test /dev/irda
*
*/
int main(int argc, char **argv)
{
unsigned char buf[2];
/* 1. 判断参数 */
if (argc != 2)
{
printf("Usage: %s <dev>\n", argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
while (1)
{
if (read(fd, buf, 2) == 2)
printf("get irda: deivce 0x%02x, data 0x%02x\n", buf[0], buf[1]);
else
printf("get irda: -1\n");
}
close(fd);
return 0;
}
四、 实验
因为ip默认是dhcp分配的所以,我ifconfig后dhcp会给我覆盖掉烦死啦,所以配置一下永久生效的好了
![]()

auto lo
iface lo inet loopback
auto eth0
iface eth0 inet static
address 192.168.5.110
netmask 255.255.255.0
gareway 192.168.5.1
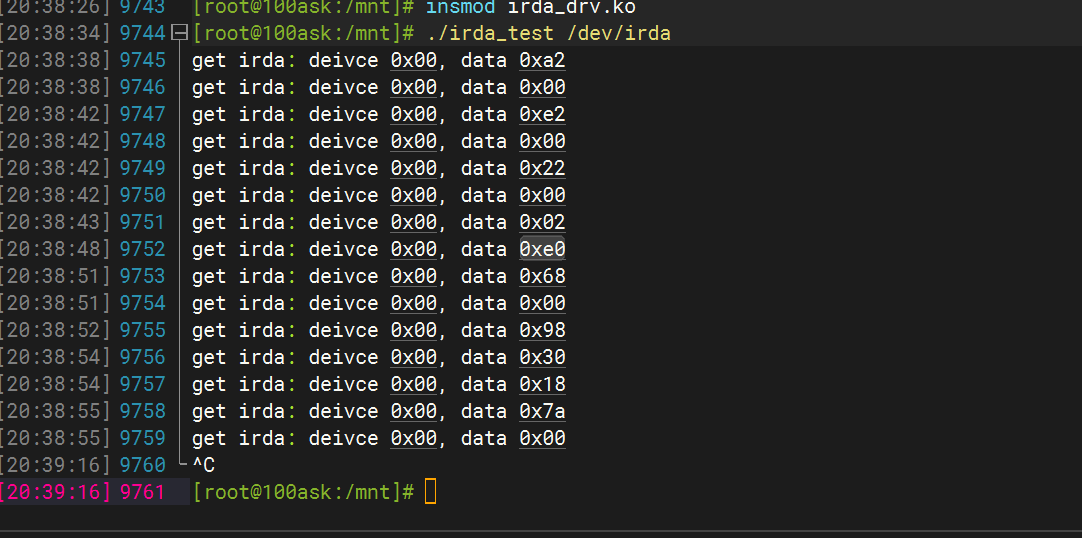
不是所有的按键都好使不知道为什么
五、 程序优化
#include "asm-generic/errno-base.h"
#include "linux/jiffies.h"
#include <linux/module.h>
#include <linux/poll.h>
#include <linux/fs.h>
#include <linux/errno.h>
#include <linux/miscdevice.h>
#include <linux/kernel.h>
#include <linux/major.h>
#include <linux/mutex.h>
#include <linux/proc_fs.h>
#include <linux/seq_file.h>
#include <linux/stat.h>
#include <linux/init.h>
#include <linux/device.h>
#include <linux/tty.h>
#include <linux/kmod.h>
#include <linux/gfp.h>
#include <linux/gpio/consumer.h>
#include <linux/platform_device.h>
#include <linux/of_gpio.h>
#include <linux/of_irq.h>
#include <linux/interrupt.h>
#include <linux/irq.h>
#include <linux/slab.h>
#include <linux/fcntl.h>
#include <linux/timer.h>
struct gpio_desc{
int gpio;
int irq;
char *name;
int key;
struct timer_list key_timer;
} ;
static struct gpio_desc gpios[] = {
{115, 0, "irda", },
};
/* 主设备号 */
static int major = 0;
static struct class *gpio_class;
/* 环形缓冲区 */
#define BUF_LEN 128
static unsigned char g_keys[BUF_LEN];
static int r, w;
struct fasync_struct *button_fasync;
static u64 g_irda_irq_times[68];
static int g_irda_irq_cnt = 0;
#define NEXT_POS(x) ((x+1) % BUF_LEN)
static int is_key_buf_empty(void)
{
return (r == w);
}
static int is_key_buf_full(void)
{
return (r == NEXT_POS(w));
}
static void put_key(unsigned char key)
{
if (!is_key_buf_full())
{
g_keys[w] = key;
w = NEXT_POS(w);
}
}
static unsigned char get_key(void)
{
unsigned char key = 0;
if (!is_key_buf_empty())
{
key = g_keys[r];
r = NEXT_POS(r);
}
return key;
}
static DECLARE_WAIT_QUEUE_HEAD(gpio_wait);
// static void key_timer_expire(struct timer_list *t)
static void key_timer_expire(unsigned long data)
{
/* 超时 */
g_irda_irq_cnt = 0;
put_key(-1);
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
/* 实现对应的open/read/write等函数,填入file_operations结构体 */
static ssize_t irda_read (struct file *file, char __user *buf, size_t size, loff_t *offset)
{
unsigned char kern_buf[2] ;
int err;
if (size != 2)
return -EINVAL;
if (is_key_buf_empty() && (file->f_flags & O_NONBLOCK))
return -EAGAIN;
wait_event_interruptible(gpio_wait, !is_key_buf_empty());
kern_buf[0] = get_key(); /* device */
kern_buf[1] = get_key(); /* data */
if (kern_buf[0] == (unsigned char)-1 && kern_buf[1] == (unsigned char)-1)
return -EIO;
err = copy_to_user(buf, kern_buf, 2);
return 2;
}
static unsigned int irda_poll(struct file *fp, poll_table * wait)
{
//printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
poll_wait(fp, &gpio_wait, wait);
return is_key_buf_empty() ? 0 : POLLIN | POLLRDNORM;
}
static int irda_fasync(int fd, struct file *file, int on)
{
if (fasync_helper(fd, file, on, &button_fasync) >= 0)
return 0;
else
return -EIO;
}
/* 定义自己的file_operations结构体 */
static struct file_operations gpio_key_drv = {
.owner = THIS_MODULE,
.read = irda_read,
.poll = irda_poll,
.fasync = irda_fasync,
};
static void parse_irda_datas(void)
{
u64 time;
int i;
int m, n;
unsigned char datas[4];
unsigned char data = 0;
int bits = 0;
int byte = 0;
/* 1. 判断前导码 : 9ms的低脉冲, 4.5ms高脉冲 */
time = g_irda_irq_times[1] - g_irda_irq_times[0];
if (time < 8000000 || time > 10000000)
{
goto err;
}
time = g_irda_irq_times[2] - g_irda_irq_times[1];
if (time < 3500000 || time > 55000000)
{
goto err;
}
/* 2. 解析数据 */
for (i = 0; i < 32; i++)
{
m = 3 + i*2;
n = m+1;
time = g_irda_irq_times[n] - g_irda_irq_times[m];
data <<= 1;
bits++;
if (time > 1000000)
{
/* 得到了数据1 */
data |= 1;
}
if (bits == 8)
{
datas[byte] = data;
byte++;
data = 0;
bits = 0;
}
}
/* 判断数据正误 */
datas[1] = ~datas[1];
datas[3] = ~datas[3];
if ((datas[0] != datas[1]) || (datas[2] != datas[3]))
{
printk("data verify err: %02x %02x %02x %02x\n", datas[0], datas[1], datas[2], datas[3]);
goto err;
}
put_key(datas[0]);
put_key(datas[2]);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
return;
err:
g_irda_irq_cnt = 0;
put_key(-1);
put_key(-1);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
}
static int get_irda_repeat_datas(void)
{
u64 time;
/* 1. 判断重复码 : 9ms的低脉冲, 2.25ms高脉冲 */
time = g_irda_irq_times[1] - g_irda_irq_times[0];
if (time < 8000000 || time > 10000000)
{
return -1;
}
time = g_irda_irq_times[2] - g_irda_irq_times[1];
if (time < 2000000 || time > 2500000)
{
return -1;
}
return 0;
}
static irqreturn_t gpio_key_isr(int irq, void *dev_id)
{
struct gpio_desc *gpio_desc = dev_id;
u64 time;
/* 1. 记录中断发生的时刻 */
time = ktime_get_ns();
g_irda_irq_times[g_irda_irq_cnt] = time;
/* 2. 累计中断次数 */
g_irda_irq_cnt++;
/* 3. 次数达标后, 删除定时器, 解析数据, 放入buffer, 唤醒APP */
if (g_irda_irq_cnt == 4)
{
/* 是否重复码 */
if (0 == get_irda_repeat_datas())
{
/* device: 0, val: 0, 表示重复码 */
put_key(0);
put_key(0);
wake_up_interruptible(&gpio_wait);
kill_fasync(&button_fasync, SIGIO, POLL_IN);
del_timer(&gpio_desc->key_timer);
g_irda_irq_cnt = 0;
return IRQ_HANDLED;
}
}
if (g_irda_irq_cnt == 68)
{
parse_irda_datas();
del_timer(&gpio_desc->key_timer);
g_irda_irq_cnt = 0;
return IRQ_HANDLED;
}
/* 4. 启动定时器 */
mod_timer(&gpio_desc->key_timer, jiffies + msecs_to_jiffies(100));
return IRQ_HANDLED;
}
/* 在入口函数 */
static int __init irda_init(void)
{
int err;
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
for (i = 0; i < count; i++)
{
gpios[i].irq = gpio_to_irq(gpios[i].gpio);
setup_timer(&gpios[i].key_timer, key_timer_expire, (unsigned long)&gpios[i]);
//timer_setup(&gpios[i].key_timer, key_timer_expire, 0);
err = request_irq(gpios[i].irq, gpio_key_isr, IRQF_TRIGGER_RISING | IRQF_TRIGGER_FALLING, gpios[i].name, &gpios[i]);
}
/* 注册file_operations */
major = register_chrdev(0, "100ask_irda", &gpio_key_drv); /* /dev/gpio_desc */
gpio_class = class_create(THIS_MODULE, "100ask_irda_class");
if (IS_ERR(gpio_class)) {
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
unregister_chrdev(major, "100ask_gpio_key");
return PTR_ERR(gpio_class);
}
device_create(gpio_class, NULL, MKDEV(major, 0), NULL, "irda"); /* /dev/irda */
return err;
}
/* 有入口函数就应该有出口函数:卸载驱动程序时,就会去调用这个出口函数
*/
static void __exit irda_exit(void)
{
int i;
int count = sizeof(gpios)/sizeof(gpios[0]);
printk("%s %s line %d\n", __FILE__, __FUNCTION__, __LINE__);
device_destroy(gpio_class, MKDEV(major, 0));
class_destroy(gpio_class);
unregister_chrdev(major, "100ask_irda");
for (i = 0; i < count; i++)
{
free_irq(gpios[i].irq, &gpios[i]);
del_timer(&gpios[i].key_timer);
}
}
/* 7. 其他完善:提供设备信息,自动创建设备节点 */
module_init(irda_init);
module_exit(irda_exit);
MODULE_LICENSE("GPL");
这次没有那个-1了,按下和弹起时都会有数据被拿到