基于qemu9.0.0
简介
QEMU是一个开源的虚拟化软件,它能够模拟各种硬件设备,支持多种虚拟化技术,如TCG、Xen、KVM等
TCG 是 QEMU 中的一个组件,它可以将高级语言编写的代码(例如 C 代码)转换为可在虚拟机中执行的低级代码(例如 x86 机器指令)。TCG 生成的代码通常比直接使用 CPU 指令更简单、更小,但执行速度可能稍慢。同时,TCG不仅可以将高级语言代码转换为低级代码,还可以执行其他优化,例如常量折叠和死代码消除。
Xen 是一种开源虚拟化技术,它直接嵌入到 Linux 内核中。这意味着 Xen 可以直接访问硬件资源,从而提供高性能的虚拟化。然而,Xen 的配置和管理可能比较复杂。Xen 支持准虚拟化,这允许客户机操作系统直接访问某些硬件资源,从而提高性能。
KVM 是 QEMU 中最常使用的一种虚拟化技术,它利用 Linux 内核提供的虚拟化功能。KVM 的优势在于其因为它提供了良好的性能和广泛的操作系统支持。但是要注意一点的是:KVM 依赖于 Linux 内核提供的虚拟化功能,因此它仅适用于 Linux 主机操作系统在 QEMU 中,KVM 的初始化过程主要包括以下步骤:
**加载虚拟机监控器模块:**首先,需要加载 KVM 模块,以便在内核中启用虚拟化功能。这一步通常在系统启动时完成。
**创建虚拟机:**接下来,使用 QEMU 命令或 API 创建一个新的虚拟机实例。在创建过程中,需要指定虚拟机的配置参数,例如内存大小、CPU 数量等。
**分配资源:**在虚拟机创建后,需要为其分配所需的资源,包括 CPU、内存和设备。这些资源由物理硬件提供,并通过虚拟化技术映射到虚拟机上。
**启动虚拟机:**一旦资源分配完成,就可以启动虚拟机了。这时,KVM 将接管虚拟机的执行,并将其与物理硬件隔离。
**执行客户机操作系统:**客户机操作系统现在可以在虚拟机中执行,就好像它直接运行在物理硬件上一样。
相关功能的源码在
target/$(arch)/kvm.c(tcg/)
QEMU 可以模拟几百个设备:

QEMU 所有支持的机器类型QEMU 可以模拟的设备QEMU 在设备模拟上采取了前端和后端分离的设计模式:
前端:
QEMU 虚拟机管理器:负责管理虚拟机实例和提供用户界面。
ARM 虚拟化扩展 (VE):在 ARM 处理器上提供虚拟化支持。
后端:
ARM CPU 模型:模拟 ARM 处理器,包括指令集、寄存器和内存管理单元 (MMU)。
ARM 虚拟 I/O 设备模型:模拟 ARM 架构中的通用虚拟 I/O 设备,例如:virtio-blk:模 拟虚拟块设备
virtio-net:模拟虚拟网络接口
virtio-serial:模拟虚拟串行端口
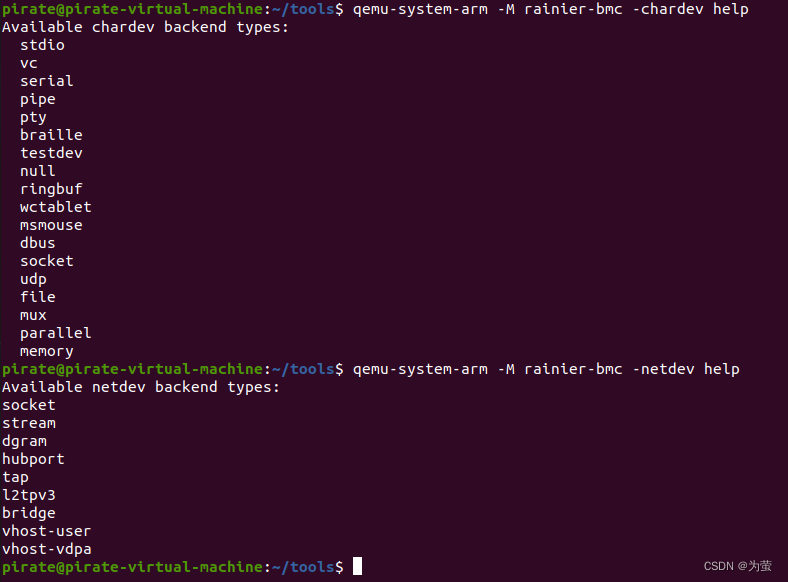
检查可以支持的后端的方法(字符和网络):
QEMU 初始化过程分析
select_machine函数(选择机器类型)
/system/vl.c
此函数用于选择要运行的机器类型。它从命令行选项或默认值中获取机器类型,然后返回所选机器的 MachineClass 结构。
static MachineClass *select_machine(QDict *qdict, Error **errp)
{
const char *machine_type = qdict_get_try_str(qdict, "type");
GSList *machines = object_class_get_list(TYPE_MACHINE, false);
MachineClass *machine_class;
Error *local_err = NULL;
if (machine_type) {
machine_class = find_machine(machine_type, machines);
qdict_del(qdict, "type");
if (!machine_class) {
error_setg(&local_err, "unsupported machine type");
}
} else {
machine_class = find_default_machine(machines);
if (!machine_class) {
error_setg(&local_err, "No machine specified, and there is no default");
}
}
g_slist_free(machines);
if (local_err) {
error_append_hint(&local_err, "Use -machine help to list supported machines\n");
error_propagate(errp, local_err);
}
return machine_class;
}cpu_exec_init_all(初始化所有 CPU 的执行引擎)
io_mem_init函数
此函数初始化 I/O 内存区域。,可见其调用了memory_region_init_io()函数
static void io_mem_init(void)
{
memory_region_init_io(&io_mem_unassigned, NULL, &unassigned_mem_ops, NULL,
NULL, UINT64_MAX);
}memory_region_init_io函数
- 调用
memory_region_init函数初始化内存区域的公共部分。 - 设置内存区域的操作集。如果未指定操作集,则使用
unassigned_mem_ops默认操作集。 - 设置内存区域的不透明数据指针。
- 将内存区域标记为终止区域。这意味着当内存区域被销毁时,它将自动从其父区域中删除。
/system/memory.c
void memory_region_init_io(MemoryRegion *mr,
Object *owner,
const MemoryRegionOps *ops,
void *opaque,
const char *name,
uint64_t size)
{
memory_region_init(mr, owner, name, size);
mr->ops = ops ? ops : &unassigned_mem_ops;
mr->opaque = opaque;
mr->terminates = true;
}memory_region_init 函数
用于初始化 MemoryRegion 结构,调用了object_initialize 函数和memory_region_do_init函数
object_initialize 函数用于初始化一个对象。它执行以下操作:
- 分配对象的内存。
- 设置对象的类型。
- 设置对象的父对象(如果存在)。
- 调用对象的
init函数(如果存在)。
/system/memory.c
void memory_region_init(MemoryRegion *mr,
Object *owner,
const char *name,
uint64_t size)
{
object_initialize(mr, sizeof(*mr), TYPE_MEMORY_REGION);
memory_region_do_init(mr, owner, name, size);
}memory_region_do_init函数
它执行以下操作:
- 设置内存区域的大小。如果大小为
UINT64_MAX,则将其设置为INT128_MAX。 - 设置内存区域的名称。
- 设置内存区域的所有者对象。
- 设置内存区域的设备状态对象(如果所有者对象是设备)。
- 设置内存区域的 RAM 块(如果存在)。
- 如果内存区域有名称,则将其添加到其所有者的子对象列表中。
static void memory_region_do_init(MemoryRegion *mr,
Object *owner,
const char *name,
uint64_t size)
{
mr->size = int128_make64(size);
if (size == UINT64_MAX) {
mr->size = int128_2_64();
}
mr->name = g_strdup(name);
mr->owner = owner;
mr->dev = (DeviceState *) object_dynamic_cast(mr->owner, TYPE_DEVICE);
mr->ram_block = NULL;
if (name) {
char *escaped_name = memory_region_escape_name(name);
char *name_array = g_strdup_printf("%s[*]", escaped_name);
if (!owner) {
owner = container_get(qdev_get_machine(), "/unattached");
}
object_property_add_child(owner, name_array, OBJECT(mr));
object_unref(OBJECT(mr));
g_free(name_array);
g_free(escaped_name);
}
}补充:
MemoryRegion 是 QEMU 中表示内存区域的抽象数据结构。它提供了一个统一的接口来访问和操作不同的类型的内存,例如物理内存、I/O 内存和设备内存。可以将 MemoryRegion 想象成一个计算机中的内存块。它有一个名称、大小和地址。你可以通过 MemoryRegion 的接口来读取和写入内存块中的数据,也可以设置回调函数来处理对内存块的访问。
/include/exec/memory.h
memory_map_init函数
-
分配内存:
分配内存用于系统内存和 I/O 空间。 -
初始化内存区域:
使用memory_region_init函数初始化系统内存区域。使用memory_region_init_io函数初始化 I/O 空间区域。 -
初始化地址空间:
使用address_space_init函数初始化用于访问系统内存和 I/O 空间的地址空间。
/system/physmem.c
static void memory_map_init(void)
{
system_memory = g_malloc(sizeof(*system_memory));
memory_region_init(system_memory, NULL, "system", UINT64_MAX);
address_space_init(&address_space_memory, system_memory, "memory");
system_io = g_malloc(sizeof(*system_io));
memory_region_init_io(system_io, NULL, &unassigned_io_ops, NULL, "io",
65536);
address_space_init(&address_space_io, system_io, "I/O");
} 通俗的讲:QEMU 是一个城市,而内存映射是城市的地图。memory_map_init 函数负责创建这个地图,它定义了城市中不同区域(内存和 I/O 空间)的位置和大小。system_memory 和 io_memory 是两个容器,分别代表城市中的住宅区(内存)和商业区(I/O 空间)。address_space_io 和 address_space_memory 是两张地图,分别显示如何到达住宅区和商业区。
page_size_init(初始化页大小)
configure_accelerator(配置加速器)
accel_init_machine函数
- 将加速器与虚拟机关联起来
- 调用加速器的
init_machine函数来进行特定于加速器的初始化 - 设置加速器的兼容性属性
/accl/accl-system.c
int accel_init_machine(AccelState *accel, MachineState *ms)
{
AccelClass *acc = ACCEL_GET_CLASS(accel);
int ret;
ms->accelerator = accel;
*(acc->allowed) = true;
ret = acc->init_machine(ms);
if (ret < 0) {
ms->accelerator = NULL;
*(acc->allowed) = false;
object_unref(OBJECT(accel));
} else {
object_set_accelerator_compat_props(acc->compat_props);
}
return ret;
}machine_run_board_init函数(初始化机器)
machine_run_board_init 函数负责初始化虚拟机的硬件平台。
- 检查虚拟机的内存大小是否有效
- 创建默认的内存后端(如果需要)
- 完成 NUMA 配置
- 创建虚拟机的 RAM
- 检查 CPU 类型是否受支持
- 初始化加速器接口
- 调用虚拟机类的
init函数 - 推进虚拟机生命周期到
PHASE_MACHINE_INITIALIZED阶段
/hw/core/machine.c
void machine_run_board_init(MachineState *machine, const char *mem_path, Error **errp)
{
ERRP_GUARD();
MachineClass *machine_class = MACHINE_GET_CLASS(machine);
/* This checkpoint is required by replay to separate prior clock
reading from the other reads, because timer polling functions query
clock values from the log. */
replay_checkpoint(CHECKPOINT_INIT);
if (!xen_enabled()) {
/* On 32-bit hosts, QEMU is limited by virtual address space */
if (machine->ram_size > (2047 << 20) && HOST_LONG_BITS == 32) {
error_setg(errp, "at most 2047 MB RAM can be simulated");
return;
}
}
if (machine->memdev) {
ram_addr_t backend_size = object_property_get_uint(OBJECT(machine->memdev),
"size", &error_abort);
if (backend_size != machine->ram_size) {
error_setg(errp, "Machine memory size does not match the size of the memory backend");
return;
}
} else if (machine_class->default_ram_id && machine->ram_size &&
numa_uses_legacy_mem()) {
if (object_property_find(object_get_objects_root(),
machine_class->default_ram_id)) {
error_setg(errp, "object's id '%s' is reserved for the default"
" RAM backend, it can't be used for any other purposes",
machine_class->default_ram_id);
error_append_hint(errp,
"Change the object's 'id' to something else or disable"
" automatic creation of the default RAM backend by setting"
" 'memory-backend=%s' with '-machine'.\n",
machine_class->default_ram_id);
return;
}
if (!create_default_memdev(current_machine, mem_path, errp)) {
return;
}
}
if (machine->numa_state) {
numa_complete_configuration(machine);
if (machine->numa_state->num_nodes) {
machine_numa_finish_cpu_init(machine);
if (machine_class->cpu_cluster_has_numa_boundary) {
validate_cpu_cluster_to_numa_boundary(machine);
}
}
}
if (!machine->ram && machine->memdev) {
machine->ram = machine_consume_memdev(machine, machine->memdev);
}
/* Check if the CPU type is supported */
if (machine->cpu_type && !is_cpu_type_supported(machine, errp)) {
return;
}
if (machine->cgs) {
/*
* With confidential guests, the host can't see the real
* contents of RAM, so there's no point in it trying to merge
* areas.
*/
machine_set_mem_merge(OBJECT(machine), false, &error_abort);
/*
* Virtio devices can't count on directly accessing guest
* memory, so they need iommu_platform=on to use normal DMA
* mechanisms. That requires also disabling legacy virtio
* support for those virtio pci devices which allow it.
*/
object_register_sugar_prop(TYPE_VIRTIO_PCI, "disable-legacy",
"on", true);
object_register_sugar_prop(TYPE_VIRTIO_DEVICE, "iommu_platform",
"on", false);
}
accel_init_interfaces(ACCEL_GET_CLASS(machine->accelerator));
machine_class->init(machine);
phase_advance(PHASE_MACHINE_INITIALIZED);
}pc_init1函数
该函数初始化 PC 特定的设置,包括创建 CPU 和内存。
-
内存分配和 ROM/BIOS 加载
- 为 RAM 分配内存并从 ROM/BIOS 加载固件。
- 如果启用了 Xen,则使用 Xen 特定的内存设置。
-
PCI 总线初始化(如果启用)
- 创建 PCI 主桥设备并将其连接到系统内存、I/O 和 PCI 内存。
- 设置 PCI 总线大小和 PCI 孔位 64 位地址空间大小。
- 将 PCI 设备映射到中断请求 (IRQ)。
-
ISA 总线初始化(如果 PCI 未启用)
- 创建 ISA 总线并将其连接到系统内存和 I/O。
- 注册 ISA 总线输入 IRQ。
-
基本设备初始化
- 初始化基本 PC 硬件,包括:
- 实时时钟 (RTC)
- 可编程中断控制器 (PIC)
- 串口和并口
- 超级 I/O 设备
- 初始化基本 PC 硬件,包括:
-
网络设备初始化
- 根据机器类型初始化网络设备。
-
IDE 设备初始化(如果 ISA 总线启用)
- 初始化 IDE 控制器和设备。
-
ACPI 初始化(如果启用)
- 创建 ACPI 设备并将其连接到 SMBus 和 SMI 中断。
-
NV DIMM 初始化(如果启用)
- 初始化 NV DIMM ACPI 状态,使其与系统 I/O 和固件配置表 (FW_CFG) 交互。
-
其他设备初始化
- 初始化 VGA 控制器。
- 根据配置设置虚拟机端口 (VMP)。
/hw/i386/pc_piix.c
/* PC hardware initialisation */
static void pc_init1(MachineState *machine, const char *pci_type)
{
PCMachineState *pcms = PC_MACHINE(machine);
PCMachineClass *pcmc = PC_MACHINE_GET_CLASS(pcms);
X86MachineState *x86ms = X86_MACHINE(machine);
MemoryRegion *system_memory = get_system_memory();
MemoryRegion *system_io = get_system_io();
Object *phb = NULL;
ISABus *isa_bus;
Object *piix4_pm = NULL;
qemu_irq smi_irq;
GSIState *gsi_state;
MemoryRegion *ram_memory;
MemoryRegion *pci_memory = NULL;
MemoryRegion *rom_memory = system_memory;
ram_addr_t lowmem;
uint64_t hole64_size = 0;
/*
* Calculate ram split, for memory below and above 4G. It's a bit
* complicated for backward compatibility reasons ...
*
* - Traditional split is 3.5G (lowmem = 0xe0000000). This is the
* default value for max_ram_below_4g now.
*
* - Then, to gigabyte align the memory, we move the split to 3G
* (lowmem = 0xc0000000). But only in case we have to split in
* the first place, i.e. ram_size is larger than (traditional)
* lowmem. And for new machine types (gigabyte_align = true)
* only, for live migration compatibility reasons.
*
* - Next the max-ram-below-4g option was added, which allowed to
* reduce lowmem to a smaller value, to allow a larger PCI I/O
* window below 4G. qemu doesn't enforce gigabyte alignment here,
* but prints a warning.
*
* - Finally max-ram-below-4g got updated to also allow raising lowmem,
* so legacy non-PAE guests can get as much memory as possible in
* the 32bit address space below 4G.
*
* - Note that Xen has its own ram setup code in xen_ram_init(),
* called via xen_hvm_init_pc().
*
* Examples:
* qemu -M pc-1.7 -m 4G (old default) -> 3584M low, 512M high
* qemu -M pc -m 4G (new default) -> 3072M low, 1024M high
* qemu -M pc,max-ram-below-4g=2G -m 4G -> 2048M low, 2048M high
* qemu -M pc,max-ram-below-4g=4G -m 3968M -> 3968M low (=4G-128M)
*/
if (xen_enabled()) {
xen_hvm_init_pc(pcms, &ram_memory);
} else {
ram_memory = machine->ram;
if (!pcms->max_ram_below_4g) {
pcms->max_ram_below_4g = 0xe0000000; /* default: 3.5G */
}
lowmem = pcms->max_ram_below_4g;
if (machine->ram_size >= pcms->max_ram_below_4g) {
if (pcmc->gigabyte_align) {
if (lowmem > 0xc0000000) {
lowmem = 0xc0000000;
}
if (lowmem & (1 * GiB - 1)) {
warn_report("Large machine and max_ram_below_4g "
"(%" PRIu64 ") not a multiple of 1G; "
"possible bad performance.",
pcms->max_ram_below_4g);
}
}
}
if (machine->ram_size >= lowmem) {
x86ms->above_4g_mem_size = machine->ram_size - lowmem;
x86ms->below_4g_mem_size = lowmem;
} else {
x86ms->above_4g_mem_size = 0;
x86ms->below_4g_mem_size = machine->ram_size;
}
}
pc_machine_init_sgx_epc(pcms);
x86_cpus_init(x86ms, pcmc->default_cpu_version);
if (kvm_enabled()) {
kvmclock_create(pcmc->kvmclock_create_always);
}
if (pcmc->pci_enabled) {
pci_memory = g_new(MemoryRegion, 1);
memory_region_init(pci_memory, NULL, "pci", UINT64_MAX);
rom_memory = pci_memory;
phb = OBJECT(qdev_new(TYPE_I440FX_PCI_HOST_BRIDGE));
object_property_add_child(OBJECT(machine), "i440fx", phb);
object_property_set_link(phb, PCI_HOST_PROP_RAM_MEM,
OBJECT(ram_memory), &error_fatal);
object_property_set_link(phb, PCI_HOST_PROP_PCI_MEM,
OBJECT(pci_memory), &error_fatal);
object_property_set_link(phb, PCI_HOST_PROP_SYSTEM_MEM,
OBJECT(system_memory), &error_fatal);
object_property_set_link(phb, PCI_HOST_PROP_IO_MEM,
OBJECT(system_io), &error_fatal);
object_property_set_uint(phb, PCI_HOST_BELOW_4G_MEM_SIZE,
x86ms->below_4g_mem_size, &error_fatal);
object_property_set_uint(phb, PCI_HOST_ABOVE_4G_MEM_SIZE,
x86ms->above_4g_mem_size, &error_fatal);
object_property_set_str(phb, I440FX_HOST_PROP_PCI_TYPE, pci_type,
&error_fatal);
sysbus_realize_and_unref(SYS_BUS_DEVICE(phb), &error_fatal);
pcms->pcibus = PCI_BUS(qdev_get_child_bus(DEVICE(phb), "pci.0"));
pci_bus_map_irqs(pcms->pcibus,
xen_enabled() ? xen_pci_slot_get_pirq
: pc_pci_slot_get_pirq);
hole64_size = object_property_get_uint(phb,
PCI_HOST_PROP_PCI_HOLE64_SIZE,
&error_abort);
}
/* allocate ram and load rom/bios */
if (!xen_enabled()) {
pc_memory_init(pcms, system_memory, rom_memory, hole64_size);
} else {
assert(machine->ram_size == x86ms->below_4g_mem_size +
x86ms->above_4g_mem_size);
pc_system_flash_cleanup_unused(pcms);
if (machine->kernel_filename != NULL) {
/* For xen HVM direct kernel boot, load linux here */
xen_load_linux(pcms);
}
}
gsi_state = pc_gsi_create(&x86ms->gsi, pcmc->pci_enabled);
if (pcmc->pci_enabled) {
PCIDevice *pci_dev;
DeviceState *dev;
size_t i;
pci_dev = pci_new_multifunction(-1, pcms->south_bridge);
object_property_set_bool(OBJECT(pci_dev), "has-usb",
machine_usb(machine), &error_abort);
object_property_set_bool(OBJECT(pci_dev), "has-acpi",
x86_machine_is_acpi_enabled(x86ms),
&error_abort);
object_property_set_bool(OBJECT(pci_dev), "has-pic", false,
&error_abort);
object_property_set_bool(OBJECT(pci_dev), "has-pit", false,
&error_abort);
qdev_prop_set_uint32(DEVICE(pci_dev), "smb_io_base", 0xb100);
object_property_set_bool(OBJECT(pci_dev), "smm-enabled",
x86_machine_is_smm_enabled(x86ms),
&error_abort);
dev = DEVICE(pci_dev);
for (i = 0; i < ISA_NUM_IRQS; i++) {
qdev_connect_gpio_out_named(dev, "isa-irqs", i, x86ms->gsi[i]);
}
pci_realize_and_unref(pci_dev, pcms->pcibus, &error_fatal);
if (xen_enabled()) {
pci_device_set_intx_routing_notifier(
pci_dev, piix_intx_routing_notifier_xen);
/*
* Xen supports additional interrupt routes from the PCI devices to
* the IOAPIC: the four pins of each PCI device on the bus are also
* connected to the IOAPIC directly.
* These additional routes can be discovered through ACPI.
*/
pci_bus_irqs(pcms->pcibus, xen_intx_set_irq, pci_dev,
XEN_IOAPIC_NUM_PIRQS);
}
isa_bus = ISA_BUS(qdev_get_child_bus(DEVICE(pci_dev), "isa.0"));
x86ms->rtc = ISA_DEVICE(object_resolve_path_component(OBJECT(pci_dev),
"rtc"));
piix4_pm = object_resolve_path_component(OBJECT(pci_dev), "pm");
dev = DEVICE(object_resolve_path_component(OBJECT(pci_dev), "ide"));
pci_ide_create_devs(PCI_DEVICE(dev));
pcms->idebus[0] = qdev_get_child_bus(dev, "ide.0");
pcms->idebus[1] = qdev_get_child_bus(dev, "ide.1");
} else {
isa_bus = isa_bus_new(NULL, system_memory, system_io,
&error_abort);
isa_bus_register_input_irqs(isa_bus, x86ms->gsi);
x86ms->rtc = isa_new(TYPE_MC146818_RTC);
qdev_prop_set_int32(DEVICE(x86ms->rtc), "base_year", 2000);
isa_realize_and_unref(x86ms->rtc, isa_bus, &error_fatal);
i8257_dma_init(OBJECT(machine), isa_bus, 0);
pcms->hpet_enabled = false;
}
if (x86ms->pic == ON_OFF_AUTO_ON || x86ms->pic == ON_OFF_AUTO_AUTO) {
pc_i8259_create(isa_bus, gsi_state->i8259_irq);
}
if (phb) {
ioapic_init_gsi(gsi_state, phb);
}
if (tcg_enabled()) {
x86_register_ferr_irq(x86ms->gsi[13]);
}
pc_vga_init(isa_bus, pcmc->pci_enabled ? pcms->pcibus : NULL);
assert(pcms->vmport != ON_OFF_AUTO__MAX);
if (pcms->vmport == ON_OFF_AUTO_AUTO) {
pcms->vmport = xen_enabled() ? ON_OFF_AUTO_OFF : ON_OFF_AUTO_ON;
}
/* init basic PC hardware */
pc_basic_device_init(pcms, isa_bus, x86ms->gsi, x86ms->rtc, true,
0x4);
pc_nic_init(pcmc, isa_bus, pcms->pcibus);
#ifdef CONFIG_IDE_ISA
if (!pcmc->pci_enabled) {
DriveInfo *hd[MAX_IDE_BUS * MAX_IDE_DEVS];
int i;
ide_drive_get(hd, ARRAY_SIZE(hd));
for (i = 0; i < MAX_IDE_BUS; i++) {
ISADevice *dev;
char busname[] = "ide.0";
dev = isa_ide_init(isa_bus, ide_iobase[i], ide_iobase2[i],
ide_irq[i],
hd[MAX_IDE_DEVS * i], hd[MAX_IDE_DEVS * i + 1]);
/*
* The ide bus name is ide.0 for the first bus and ide.1 for the
* second one.
*/
busname[4] = '0' + i;
pcms->idebus[i] = qdev_get_child_bus(DEVICE(dev), busname);
}
}
#endif
if (piix4_pm) {
smi_irq = qemu_allocate_irq(pc_acpi_smi_interrupt, first_cpu, 0);
qdev_connect_gpio_out_named(DEVICE(piix4_pm), "smi-irq", 0, smi_irq);
pcms->smbus = I2C_BUS(qdev_get_child_bus(DEVICE(piix4_pm), "i2c"));
/* TODO: Populate SPD eeprom data. */
smbus_eeprom_init(pcms->smbus, 8, NULL, 0);
object_property_add_link(OBJECT(machine), PC_MACHINE_ACPI_DEVICE_PROP,
TYPE_HOTPLUG_HANDLER,
(Object **)&x86ms->acpi_dev,
object_property_allow_set_link,
OBJ_PROP_LINK_STRONG);
object_property_set_link(OBJECT(machine), PC_MACHINE_ACPI_DEVICE_PROP,
piix4_pm, &error_abort);
}
if (machine->nvdimms_state->is_enabled) {
nvdimm_init_acpi_state(machine->nvdimms_state, system_io,
x86_nvdimm_acpi_dsmio,
x86ms->fw_cfg, OBJECT(pcms));
}
}创建和初始化CPU
pc_init1:初始化 PC 特定的设置,包括创建 CPU 和内存。x86_cpus_init:根据配置创建和初始化多个 CPU。x86_cpu_new:创建一个新的 X86CPU 设备。qdev_realize:经过 QOM 的object_property机制,最后调用到device_set_realized。device_set_realized:标记设备已实现,并调用设备的realize函数。x86_cpu_realizefn:X86CPU 设备的realize函数,负责初始化 CPU 的寄存器、内存映射和中断。
x86_cpus_init函数
-
设置默认 CPU 版
-
计算 CPU APIC ID 限制(计算 CPU APIC ID 的最大值,以确保所有 CPU APIC ID 都小于此限制)
-
检查 APIC ID 255 或更高(如果启用了 KVM 并且 APIC ID 限制大于 255,则检查是否启用了内核中的 lapic 和 X2APIC 用户空间 API)
-
设置 KVM 最大 APIC ID(如果启用了 KVM,则设置 KVM 的最大 APIC ID)
-
设置 APIC 最大 APIC ID(如果内核中没有 irqchip,则设置 APIC 的最大 APIC ID)
-
获取可能的 CPU 架构 ID 列表(获取机器类支持的可能 CPU 架构 ID 列表)
-
创建 CPU(对于每个 CPU,创建并初始化一个新的 CPU)
/hw/i386/x86.c
void x86_cpus_init(X86MachineState *x86ms, int default_cpu_version)
{
int i;
const CPUArchIdList *possible_cpus;
MachineState *ms = MACHINE(x86ms);
MachineClass *mc = MACHINE_GET_CLASS(x86ms);
x86_cpu_set_default_version(default_cpu_version);
/*
* Calculates the limit to CPU APIC ID values
*
* Limit for the APIC ID value, so that all
* CPU APIC IDs are < x86ms->apic_id_limit.
*
* This is used for FW_CFG_MAX_CPUS. See comments on fw_cfg_arch_create().
*/
x86ms->apic_id_limit = x86_cpu_apic_id_from_index(x86ms,
ms->smp.max_cpus - 1) + 1;
/*
* Can we support APIC ID 255 or higher? With KVM, that requires
* both in-kernel lapic and X2APIC userspace API.
*
* kvm_enabled() must go first to ensure that kvm_* references are
* not emitted for the linker to consume (kvm_enabled() is
* a literal `0` in configurations where kvm_* aren't defined)
*/
if (kvm_enabled() && x86ms->apic_id_limit > 255 &&
kvm_irqchip_in_kernel() && !kvm_enable_x2apic()) {
error_report("current -smp configuration requires kernel "
"irqchip and X2APIC API support.");
exit(EXIT_FAILURE);
}
if (kvm_enabled()) {
kvm_set_max_apic_id(x86ms->apic_id_limit);
}
if (!kvm_irqchip_in_kernel()) {
apic_set_max_apic_id(x86ms->apic_id_limit);
}
possible_cpus = mc->possible_cpu_arch_ids(ms);
for (i = 0; i < ms->smp.cpus; i++) {
x86_cpu_new(x86ms, possible_cpus->cpus[i].arch_id, &error_fatal);
}
}x86_cpu_new函数
-
创建 CPU 对象
-
设置 APIC ID
-
实现 CPU
-
清理(取消引用 CPU 对象)
/hw/i386/x86.c
void x86_cpu_new(X86MachineState *x86ms, int64_t apic_id, Error **errp)
{
Object *cpu = object_new(MACHINE(x86ms)->cpu_type);
if (!object_property_set_uint(cpu, "apic-id", apic_id, errp)) {
goto out;
}
qdev_realize(DEVICE(cpu), NULL, errp);
out:
object_unref(cpu);
}qdev_realize函数
该函数负责实现设备
/hw/i386/x86.c
bool qdev_realize(DeviceState *dev, BusState *bus, Error **errp)
{
assert(!dev->realized && !dev->parent_bus);
if (bus) {
if (!qdev_set_parent_bus(dev, bus, errp)) {
return false;
}
} else {
assert(!DEVICE_GET_CLASS(dev)->bus_type);
}
return object_property_set_bool(OBJECT(dev), "realized", true, errp);
}device_set_realized函数
- 设置设备的已实现标志
- 调用设备类的
realize函数(如果存在) - 调用设备监听器的
realize函数 - 设置设备的规范路径
- 注册设备的 VM 状态(如果存在)
- 实现设备的子总线
- 如果设备是热插拔的,则复位设备并将其插入父总线
- 设置设备的挂起已删除事件标志
- 调用设备的热插拔处理程序(如果存在)
- 释放与设备关联的内存
- 取消实现设备的子总线
- 取消注册设备的 VM 状态(如果存在)
- 设置设备的规范路径为 NULL
- 调用设备类的
unrealize函数(如果存在) - 调用设备监听器的
unrealize函数 - 设置设备的已实现标志为 false
/hw/core/qdev.c
static void device_set_realized(Object *obj, bool value, Error **errp)
{
DeviceState *dev = DEVICE(obj);
DeviceClass *dc = DEVICE_GET_CLASS(dev);
HotplugHandler *hotplug_ctrl;
BusState *bus;
NamedClockList *ncl;
Error *local_err = NULL;
bool unattached_parent = false;
static int unattached_count;
if (dev->hotplugged && !dc->hotpluggable) {
error_setg(errp, QERR_DEVICE_NO_HOTPLUG, object_get_typename(obj));
return;
}
if (value && !dev->realized) {
if (!check_only_migratable(obj, errp)) {
goto fail;
}
if (!obj->parent) {
gchar *name = g_strdup_printf("device[%d]", unattached_count++);
object_property_add_child(container_get(qdev_get_machine(),
"/unattached"),
name, obj);
unattached_parent = true;
g_free(name);
}
hotplug_ctrl = qdev_get_hotplug_handler(dev);
if (hotplug_ctrl) {
hotplug_handler_pre_plug(hotplug_ctrl, dev, &local_err);
if (local_err != NULL) {
goto fail;
}
}
if (dc->realize) {
dc->realize(dev, &local_err);
if (local_err != NULL) {
goto fail;
}
}
DEVICE_LISTENER_CALL(realize, Forward, dev);
/*
* always free/re-initialize here since the value cannot be cleaned up
* in device_unrealize due to its usage later on in the unplug path
*/
g_free(dev->canonical_path);
dev->canonical_path = object_get_canonical_path(OBJECT(dev));
QLIST_FOREACH(ncl, &dev->clocks, node) {
if (ncl->alias) {
continue;
} else {
clock_setup_canonical_path(ncl->clock);
}
}
if (qdev_get_vmsd(dev)) {
if (vmstate_register_with_alias_id(VMSTATE_IF(dev),
VMSTATE_INSTANCE_ID_ANY,
qdev_get_vmsd(dev), dev,
dev->instance_id_alias,
dev->alias_required_for_version,
&local_err) < 0) {
goto post_realize_fail;
}
}
/*
* Clear the reset state, in case the object was previously unrealized
* with a dirty state.
*/
resettable_state_clear(&dev->reset);
QLIST_FOREACH(bus, &dev->child_bus, sibling) {
if (!qbus_realize(bus, errp)) {
goto child_realize_fail;
}
}
if (dev->hotplugged) {
/*
* Reset the device, as well as its subtree which, at this point,
* should be realized too.
*/
resettable_assert_reset(OBJECT(dev), RESET_TYPE_COLD);
resettable_change_parent(OBJECT(dev), OBJECT(dev->parent_bus),
NULL);
resettable_release_reset(OBJECT(dev), RESET_TYPE_COLD);
}
dev->pending_deleted_event = false;
if (hotplug_ctrl) {
hotplug_handler_plug(hotplug_ctrl, dev, &local_err);
if (local_err != NULL) {
goto child_realize_fail;
}
}
qatomic_store_release(&dev->realized, value);
} else if (!value && dev->realized) {
/*
* Change the value so that any concurrent users are aware
* that the device is going to be unrealized
*
* TODO: change .realized property to enum that states
* each phase of the device realization/unrealization
*/
qatomic_set(&dev->realized, value);
/*
* Ensure that concurrent users see this update prior to
* any other changes done by unrealize.
*/
smp_wmb();
QLIST_FOREACH(bus, &dev->child_bus, sibling) {
qbus_unrealize(bus);
}
if (qdev_get_vmsd(dev)) {
vmstate_unregister(VMSTATE_IF(dev), qdev_get_vmsd(dev), dev);
}
if (dc->unrealize) {
dc->unrealize(dev);
}
dev->pending_deleted_event = true;
DEVICE_LISTENER_CALL(unrealize, Reverse, dev);
}
assert(local_err == NULL);
return;
child_realize_fail:
QLIST_FOREACH(bus, &dev->child_bus, sibling) {
qbus_unrealize(bus);
}
if (qdev_get_vmsd(dev)) {
vmstate_unregister(VMSTATE_IF(dev), qdev_get_vmsd(dev), dev);
}
post_realize_fail:
g_free(dev->canonical_path);
dev->canonical_path = NULL;
if (dc->unrealize) {
dc->unrealize(dev);
}
fail:
error_propagate(errp, local_err);
if (unattached_parent) {
/*
* Beware, this doesn't just revert
* object_property_add_child(), it also runs bus_remove()!
*/
object_unparent(OBJECT(dev));
unattached_count--;
}
}x86_cpu_realizefn函数
该函数负责实现 x86 CPU。其主要功能包括:
* 初始化 CPU 状态,包括 APIC ID、Hyper-V 增强功能、CPU 特性等。
* 调用框架实现函数,执行 CPU 特定的初始化。
* 检查主机 CPUID 要求,确保加速器支持请求的特性。
* 设置微码版本、MWAIT 扩展信息、物理位数等 CPU 参数。
* 初始化缓存信息。
* 创建 APIC(仅限 KVM)。
* 初始化机器检查异常 (MCE)。
* 初始化 VCPU。
* 警告超线程问题(如果存在)。
* 实现 APIC(仅限 KVM)。
* 重置 CPU。
* 调用 CPU 类父类的实现函数。
* 释放与 CPU 关联的内存。
/target/i386/cpu.c
static void x86_cpu_realizefn(DeviceState *dev, Error **errp)
{
CPUState *cs = CPU(dev);
X86CPU *cpu = X86_CPU(dev);
X86CPUClass *xcc = X86_CPU_GET_CLASS(dev);
CPUX86State *env = &cpu->env;
Error *local_err = NULL;
static bool ht_warned;
unsigned requested_lbr_fmt;
#if defined(CONFIG_TCG) && !defined(CONFIG_USER_ONLY)
/* Use pc-relative instructions in system-mode */
cs->tcg_cflags |= CF_PCREL;
#endif
if (cpu->apic_id == UNASSIGNED_APIC_ID) {
error_setg(errp, "apic-id property was not initialized properly");
return;
}
/*
* Process Hyper-V enlightenments.
* Note: this currently has to happen before the expansion of CPU features.
*/
x86_cpu_hyperv_realize(cpu);
x86_cpu_expand_features(cpu, &local_err);
if (local_err) {
goto out;
}
/*
* Override env->features[FEAT_PERF_CAPABILITIES].LBR_FMT
* with user-provided setting.
*/
if (cpu->lbr_fmt != ~PERF_CAP_LBR_FMT) {
if ((cpu->lbr_fmt & PERF_CAP_LBR_FMT) != cpu->lbr_fmt) {
error_setg(errp, "invalid lbr-fmt");
return;
}
env->features[FEAT_PERF_CAPABILITIES] &= ~PERF_CAP_LBR_FMT;
env->features[FEAT_PERF_CAPABILITIES] |= cpu->lbr_fmt;
}
/*
* vPMU LBR is supported when 1) KVM is enabled 2) Option pmu=on and
* 3)vPMU LBR format matches that of host setting.
*/
requested_lbr_fmt =
env->features[FEAT_PERF_CAPABILITIES] & PERF_CAP_LBR_FMT;
if (requested_lbr_fmt && kvm_enabled()) {
uint64_t host_perf_cap =
x86_cpu_get_supported_feature_word(FEAT_PERF_CAPABILITIES, false);
unsigned host_lbr_fmt = host_perf_cap & PERF_CAP_LBR_FMT;
if (!cpu->enable_pmu) {
error_setg(errp, "vPMU: LBR is unsupported without pmu=on");
return;
}
if (requested_lbr_fmt != host_lbr_fmt) {
error_setg(errp, "vPMU: the lbr-fmt value (0x%x) does not match "
"the host value (0x%x).",
requested_lbr_fmt, host_lbr_fmt);
return;
}
}
x86_cpu_filter_features(cpu, cpu->check_cpuid || cpu->enforce_cpuid);
if (cpu->enforce_cpuid && x86_cpu_have_filtered_features(cpu)) {
error_setg(&local_err,
accel_uses_host_cpuid() ?
"Host doesn't support requested features" :
"TCG doesn't support requested features");
goto out;
}
/* On AMD CPUs, some CPUID[8000_0001].EDX bits must match the bits on
* CPUID[1].EDX.
*/
if (IS_AMD_CPU(env)) {
env->features[FEAT_8000_0001_EDX] &= ~CPUID_EXT2_AMD_ALIASES;
env->features[FEAT_8000_0001_EDX] |= (env->features[FEAT_1_EDX]
& CPUID_EXT2_AMD_ALIASES);
}
x86_cpu_set_sgxlepubkeyhash(env);
/*
* note: the call to the framework needs to happen after feature expansion,
* but before the checks/modifications to ucode_rev, mwait, phys_bits.
* These may be set by the accel-specific code,
* and the results are subsequently checked / assumed in this function.
*/
cpu_exec_realizefn(cs, &local_err);
if (local_err != NULL) {
error_propagate(errp, local_err);
return;
}
if (xcc->host_cpuid_required && !accel_uses_host_cpuid()) {
g_autofree char *name = x86_cpu_class_get_model_name(xcc);
error_setg(&local_err, "CPU model '%s' requires KVM or HVF", name);
goto out;
}
if (cpu->ucode_rev == 0) {
/*
* The default is the same as KVM's. Note that this check
* needs to happen after the evenual setting of ucode_rev in
* accel-specific code in cpu_exec_realizefn.
*/
if (IS_AMD_CPU(env)) {
cpu->ucode_rev = 0x01000065;
} else {
cpu->ucode_rev = 0x100000000ULL;
}
}
/*
* mwait extended info: needed for Core compatibility
* We always wake on interrupt even if host does not have the capability.
*
* requires the accel-specific code in cpu_exec_realizefn to
* have already acquired the CPUID data into cpu->mwait.
*/
cpu->mwait.ecx |= CPUID_MWAIT_EMX | CPUID_MWAIT_IBE;
/* For 64bit systems think about the number of physical bits to present.
* ideally this should be the same as the host; anything other than matching
* the host can cause incorrect guest behaviour.
* QEMU used to pick the magic value of 40 bits that corresponds to
* consumer AMD devices but nothing else.
*
* Note that this code assumes features expansion has already been done
* (as it checks for CPUID_EXT2_LM), and also assumes that potential
* phys_bits adjustments to match the host have been already done in
* accel-specific code in cpu_exec_realizefn.
*/
if (env->features[FEAT_8000_0001_EDX] & CPUID_EXT2_LM) {
if (cpu->phys_bits &&
(cpu->phys_bits > TARGET_PHYS_ADDR_SPACE_BITS ||
cpu->phys_bits < 32)) {
error_setg(errp, "phys-bits should be between 32 and %u "
" (but is %u)",
TARGET_PHYS_ADDR_SPACE_BITS, cpu->phys_bits);
return;
}
/*
* 0 means it was not explicitly set by the user (or by machine
* compat_props or by the host code in host-cpu.c).
* In this case, the default is the value used by TCG (40).
*/
if (cpu->phys_bits == 0) {
cpu->phys_bits = TCG_PHYS_ADDR_BITS;
}
} else {
/* For 32 bit systems don't use the user set value, but keep
* phys_bits consistent with what we tell the guest.
*/
if (cpu->phys_bits != 0) {
error_setg(errp, "phys-bits is not user-configurable in 32 bit");
return;
}
if (env->features[FEAT_1_EDX] & (CPUID_PSE36 | CPUID_PAE)) {
cpu->phys_bits = 36;
} else {
cpu->phys_bits = 32;
}
}
/* Cache information initialization */
if (!cpu->legacy_cache) {
const CPUCaches *cache_info =
x86_cpu_get_versioned_cache_info(cpu, xcc->model);
if (!xcc->model || !cache_info) {
g_autofree char *name = x86_cpu_class_get_model_name(xcc);
error_setg(errp,
"CPU model '%s' doesn't support legacy-cache=off", name);
return;
}
env->cache_info_cpuid2 = env->cache_info_cpuid4 = env->cache_info_amd =
*cache_info;
} else {
/* Build legacy cache information */
env->cache_info_cpuid2.l1d_cache = &legacy_l1d_cache;
env->cache_info_cpuid2.l1i_cache = &legacy_l1i_cache;
env->cache_info_cpuid2.l2_cache = &legacy_l2_cache_cpuid2;
env->cache_info_cpuid2.l3_cache = &legacy_l3_cache;
env->cache_info_cpuid4.l1d_cache = &legacy_l1d_cache;
env->cache_info_cpuid4.l1i_cache = &legacy_l1i_cache;
env->cache_info_cpuid4.l2_cache = &legacy_l2_cache;
env->cache_info_cpuid4.l3_cache = &legacy_l3_cache;
env->cache_info_amd.l1d_cache = &legacy_l1d_cache_amd;
env->cache_info_amd.l1i_cache = &legacy_l1i_cache_amd;
env->cache_info_amd.l2_cache = &legacy_l2_cache_amd;
env->cache_info_amd.l3_cache = &legacy_l3_cache;
}
#ifndef CONFIG_USER_ONLY
MachineState *ms = MACHINE(qdev_get_machine());
qemu_register_reset(x86_cpu_machine_reset_cb, cpu);
if (cpu->env.features[FEAT_1_EDX] & CPUID_APIC || ms->smp.cpus > 1) {
x86_cpu_apic_create(cpu, &local_err);
if (local_err != NULL) {
goto out;
}
}
#endif
mce_init(cpu);
qemu_init_vcpu(cs);
/*
* Most Intel and certain AMD CPUs support hyperthreading. Even though QEMU
* fixes this issue by adjusting CPUID_0000_0001_EBX and CPUID_8000_0008_ECX
* based on inputs (sockets,cores,threads), it is still better to give
* users a warning.
*
* NOTE: the following code has to follow qemu_init_vcpu(). Otherwise
* cs->nr_threads hasn't be populated yet and the checking is incorrect.
*/
if (IS_AMD_CPU(env) &&
!(env->features[FEAT_8000_0001_ECX] & CPUID_EXT3_TOPOEXT) &&
cs->nr_threads > 1 && !ht_warned) {
warn_report("This family of AMD CPU doesn't support "
"hyperthreading(%d)",
cs->nr_threads);
error_printf("Please configure -smp options properly"
" or try enabling topoext feature.\n");
ht_warned = true;
}
#ifndef CONFIG_USER_ONLY
x86_cpu_apic_realize(cpu, &local_err);
if (local_err != NULL) {
goto out;
}
#endif /* !CONFIG_USER_ONLY */
cpu_reset(cs);
xcc->parent_realize(dev, &local_err);
out:
if (local_err != NULL) {
error_propagate(errp, local_err);
return;
}
}初始化 PC 的内存和固件
- 初始化内存并将其添加到系统中。
- 加载 BIOS 映像。
- 将 BIOS 映像添加到 ROM 列表中。
- 将 ROM 列表插入到系统中。
- 将 BIOS 的最后 128KB 映射到 ISA 空间。
- 将所有 BIOS 映射到内存顶部。
- 创建可选 ROM 区域。
- 创建 FWCfgState 并初始化参数。
- 使用 FWCfgState 初始化全局 fw_cfg。
- 如果指定了内核,则加载内核。
- 添加 ROM 镜像。