遮挡效果
本段描述摘自 https://developers.google.cn/ar/develop/depth
遮挡是深度API的应用之一。
遮挡(即准确渲染虚拟物体在现实物体后面)对于沉浸式 AR 体验至关重要。
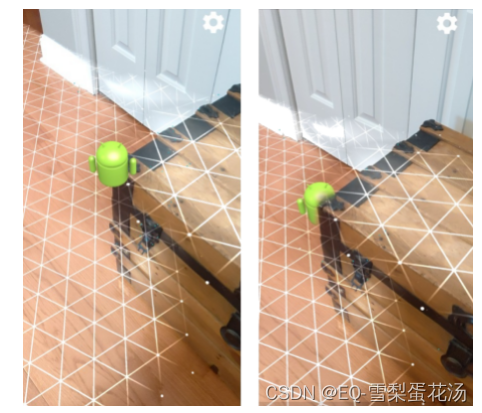
参考下图,假设场景中有一个Andy,用户可能需要放置在包含门边有后备箱的场景中。渲染时没有遮挡,Andy 会不切实际地与树干边缘重叠。如果您使用场景的深度来了解虚拟 Andy 相对于木箱等周围环境的距离,就可以准确地渲染 Andy 的遮挡效果,使其在周围环境中看起来更逼真。
图片源自 https://developers.google.cn/ar/develop/depth
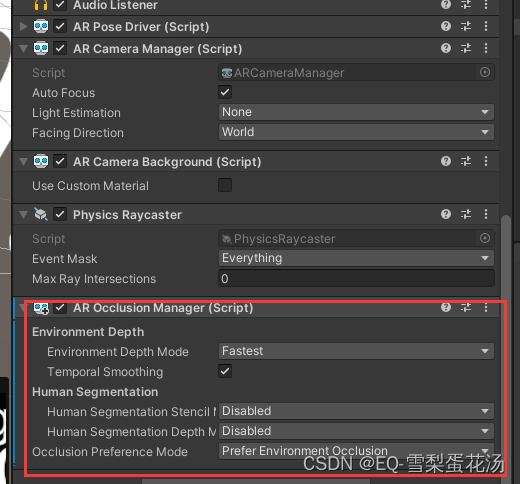
使用ARFoundation
ARFoundation中提供了AROcclusionManager脚本,在AR Session Origin的AR Camera对象上挂载该脚本即可。在场景启动后,会自动启用虚实遮挡(当然Depth Mode 不能选择的是disable)。
AROcclusionManager脚本内容如下:
using System;
using System.Collections.Generic;
using Unity.Collections;
using UnityEngine.Serialization;
using UnityEngine.XR.ARSubsystems;
using UnityEngine.Rendering;
namespace UnityEngine.XR.ARFoundation
{
/// <summary>
/// The manager for the occlusion subsystem.
/// </summary>
[DisallowMultipleComponent]
[DefaultExecutionOrder(ARUpdateOrder.k_OcclusionManager)]
[HelpURL(HelpUrls.ApiWithNamespace + nameof(AROcclusionManager) + ".html")]
public sealed class AROcclusionManager :
SubsystemLifecycleManager<XROcclusionSubsystem, XROcclusionSubsystemDescriptor, XROcclusionSubsystem.Provider>
{
/// <summary>
/// The list of occlusion texture infos.
/// </summary>
/// <value>
/// The list of occlusion texture infos.
/// </value>
readonly List<ARTextureInfo> m_TextureInfos = new List<ARTextureInfo>();
/// <summary>
/// The list of occlusion textures.
/// </summary>
/// <value>
/// The list of occlusion textures.
/// </value>
readonly List<Texture2D> m_Textures = new List<Texture2D>();
/// <summary>
/// The list of occlusion texture property IDs.
/// </summary>
/// <value>
/// The list of occlusion texture property IDs.
/// </value>
readonly List<int> m_TexturePropertyIds = new List<int>();
/// <summary>
/// The human stencil texture info.
/// </summary>
/// <value>
/// The human stencil texture info.
/// </value>
ARTextureInfo m_HumanStencilTextureInfo;
/// <summary>
/// The human depth texture info.
/// </summary>
/// <value>
/// The human depth texture info.
/// </value>
ARTextureInfo m_HumanDepthTextureInfo;
/// <summary>
/// The environment depth texture info.
/// </summary>
/// <value>
/// The environment depth texture info.
/// </value>
ARTextureInfo m_EnvironmentDepthTextureInfo;
/// <summary>
/// The environment depth confidence texture info.
/// </summary>
/// <value>
/// The environment depth confidence texture info.
/// </value>
ARTextureInfo m_EnvironmentDepthConfidenceTextureInfo;
/// <summary>
/// An event which fires each time an occlusion camera frame is received.
/// </summary>
public event Action<AROcclusionFrameEventArgs> frameReceived;
/// <summary>
/// The mode for generating the human segmentation stencil texture.
/// This method is obsolete.
/// Use <see cref="requestedHumanStencilMode"/>
/// or <see cref="currentHumanStencilMode"/> instead.
/// </summary>
[Obsolete("Use requestedSegmentationStencilMode or currentSegmentationStencilMode instead. (2020-01-14)")]
public HumanSegmentationStencilMode humanSegmentationStencilMode
{
get => m_HumanSegmentationStencilMode;
set => requestedHumanStencilMode = value;
}
/// <summary>
/// The requested mode for generating the human segmentation stencil texture.
/// </summary>
public HumanSegmentationStencilMode requestedHumanStencilMode
{
get => subsystem?.requestedHumanStencilMode ?? m_HumanSegmentationStencilMode;
set
{
m_HumanSegmentationStencilMode = value;
if (enabled && descriptor?.humanSegmentationStencilImageSupported == Supported.Supported)
{
subsystem.requestedHumanStencilMode = value;
}
}
}
/// <summary>
/// Get the current mode in use for generating the human segmentation stencil mode.
/// </summary>
public HumanSegmentationStencilMode currentHumanStencilMode => subsystem?.currentHumanStencilMode ?? HumanSegmentationStencilMode.Disabled;
[SerializeField]
[Tooltip("The mode for generating human segmentation stencil texture.\n\n"
+ "Disabled -- No human stencil texture produced.\n"
+ "Fastest -- Minimal rendering quality. Minimal frame computation.\n"
+ "Medium -- Medium rendering quality. Medium frame computation.\n"
+ "Best -- Best rendering quality. Increased frame computation.")]
HumanSegmentationStencilMode m_HumanSegmentationStencilMode = HumanSegmentationStencilMode.Disabled;
/// <summary>
/// The mode for generating the human segmentation depth texture.
/// This method is obsolete.
/// Use <see cref="requestedHumanDepthMode"/>
/// or <see cref="currentHumanDepthMode"/> instead.
/// </summary>
[Obsolete("Use requestedSegmentationDepthMode or currentSegmentationDepthMode instead. (2020-01-15)")]
public HumanSegmentationDepthMode humanSegmentationDepthMode
{
get => m_HumanSegmentationDepthMode;
set => requestedHumanDepthMode = value;
}
/// <summary>
/// Get or set the requested human segmentation depth mode.
/// </summary>
public HumanSegmentationDepthMode requestedHumanDepthMode
{
get => subsystem?.requestedHumanDepthMode ?? m_HumanSegmentationDepthMode;
set
{
m_HumanSegmentationDepthMode = value;
if (enabled && descriptor?.humanSegmentationDepthImageSupported == Supported.Supported)
{
subsystem.requestedHumanDepthMode = value;
}
}
}
/// <summary>
/// Get the current human segmentation depth mode in use by the subsystem.
/// </summary>
public HumanSegmentationDepthMode currentHumanDepthMode => subsystem?.currentHumanDepthMode ?? HumanSegmentationDepthMode.Disabled;
[SerializeField]
[Tooltip("The mode for generating human segmentation depth texture.\n\n"
+ "Disabled -- No human depth texture produced.\n"
+ "Fastest -- Minimal rendering quality. Minimal frame computation.\n"
+ "Best -- Best rendering quality. Increased frame computation.")]
HumanSegmentationDepthMode m_HumanSegmentationDepthMode = HumanSegmentationDepthMode.Disabled;
/// <summary>
/// Get or set the requested environment depth mode.
/// </summary>
public EnvironmentDepthMode requestedEnvironmentDepthMode
{
get => subsystem?.requestedEnvironmentDepthMode ?? m_EnvironmentDepthMode;
set
{
m_EnvironmentDepthMode = value;
if (enabled && descriptor?.environmentDepthImageSupported == Supported.Supported)
{
subsystem.requestedEnvironmentDepthMode = value;
}
}
}
/// <summary>
/// Get the current environment depth mode in use by the subsystem.
/// </summary>
public EnvironmentDepthMode currentEnvironmentDepthMode => subsystem?.currentEnvironmentDepthMode ?? EnvironmentDepthMode.Disabled;
[SerializeField]
[Tooltip("The mode for generating the environment depth texture.\n\n"
+ "Disabled -- No environment depth texture produced.\n"
+ "Fastest -- Minimal rendering quality. Minimal frame computation.\n"
+ "Medium -- Medium rendering quality. Medium frame computation.\n"
+ "Best -- Best rendering quality. Increased frame computation.")]
EnvironmentDepthMode m_EnvironmentDepthMode = EnvironmentDepthMode.Fastest;
[SerializeField]
bool m_EnvironmentDepthTemporalSmoothing = true;
/// <summary>
/// Whether temporal smoothing should be applied to the environment depth image. Query for support with
/// [environmentDepthTemporalSmoothingSupported](xref:UnityEngine.XR.ARSubsystems.XROcclusionSubsystemDescriptor.environmentDepthTemporalSmoothingSupported).
/// </summary>
/// <value>When `true`, temporal smoothing is applied to the environment depth image. Otherwise, no temporal smoothing is applied.</value>
public bool environmentDepthTemporalSmoothingRequested
{
get => subsystem?.environmentDepthTemporalSmoothingRequested ?? m_EnvironmentDepthTemporalSmoothing;
set
{
m_EnvironmentDepthTemporalSmoothing = value;
if (enabled && descriptor?.environmentDepthTemporalSmoothingSupported == Supported.Supported)
{
subsystem.environmentDepthTemporalSmoothingRequested = value;
}
}
}
/// <summary>
/// Whether temporal smoothing is applied to the environment depth image. Query for support with
/// [environmentDepthTemporalSmoothingSupported](xref:UnityEngine.XR.ARSubsystems.XROcclusionSubsystemDescriptor.environmentDepthTemporalSmoothingSupported).
/// </summary>
/// <value>Read Only.</value>
public bool environmentDepthTemporalSmoothingEnabled => subsystem?.environmentDepthTemporalSmoothingEnabled ?? false;
/// <summary>
/// Get or set the requested occlusion preference mode.
/// </summary>
public OcclusionPreferenceMode requestedOcclusionPreferenceMode
{
get => subsystem?.requestedOcclusionPreferenceMode ?? m_OcclusionPreferenceMode;
set
{
m_OcclusionPreferenceMode = value;
if (enabled && subsystem != null)
{
subsystem.requestedOcclusionPreferenceMode = value;
}
}
}
/// <summary>
/// Get the current occlusion preference mode in use by the subsystem.
/// </summary>
public OcclusionPreferenceMode currentOcclusionPreferenceMode => subsystem?.currentOcclusionPreferenceMode ?? OcclusionPreferenceMode.PreferEnvironmentOcclusion;
[SerializeField]
[Tooltip("If both environment texture and human stencil & depth textures are available, this mode specifies which should be used for occlusion.")]
OcclusionPreferenceMode m_OcclusionPreferenceMode = OcclusionPreferenceMode.PreferEnvironmentOcclusion;
/// <summary>
/// The human segmentation stencil texture.
/// </summary>
/// <value>
/// The human segmentation stencil texture, if any. Otherwise, <c>null</c>.
/// </value>
public Texture2D humanStencilTexture
{
get
{
if (descriptor?.humanSegmentationStencilImageSupported == Supported.Supported &&
subsystem.TryGetHumanStencil(out var humanStencilDescriptor))
{
m_HumanStencilTextureInfo = ARTextureInfo.GetUpdatedTextureInfo(m_HumanStencilTextureInfo,
humanStencilDescriptor);
DebugAssert.That(((m_HumanStencilTextureInfo.descriptor.dimension == TextureDimension.Tex2D)
|| (m_HumanStencilTextureInfo.descriptor.dimension == TextureDimension.None)))?.
WithMessage("Human Stencil Texture needs to be a Texture 2D, but instead is "
+ $"{m_HumanStencilTextureInfo.descriptor.dimension.ToString()}.");
return m_HumanStencilTextureInfo.texture as Texture2D;
}
return null;
}
}
/// <summary>
/// Attempt to get the latest human stencil CPU image. This provides directly access to the raw pixel data.
/// </summary>
/// <remarks>
/// The `XRCpuImage` must be disposed to avoid resource leaks.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireHumanStencilCpuImage(out XRCpuImage cpuImage)
{
if (descriptor?.humanSegmentationStencilImageSupported == Supported.Supported)
{
return subsystem.TryAcquireHumanStencilCpuImage(out cpuImage);
}
cpuImage = default;
return false;
}
/// <summary>
/// The human segmentation depth texture.
/// </summary>
/// <value>
/// The human segmentation depth texture, if any. Otherwise, <c>null</c>.
/// </value>
public Texture2D humanDepthTexture
{
get
{
if (descriptor?.humanSegmentationDepthImageSupported == Supported.Supported &&
subsystem.TryGetHumanDepth(out var humanDepthDescriptor))
{
m_HumanDepthTextureInfo = ARTextureInfo.GetUpdatedTextureInfo(m_HumanDepthTextureInfo,
humanDepthDescriptor);
DebugAssert.That(m_HumanDepthTextureInfo.descriptor.dimension == TextureDimension.Tex2D
|| m_HumanDepthTextureInfo.descriptor.dimension == TextureDimension.None)?.
WithMessage("Human Depth Texture needs to be a Texture 2D, but instead is "
+ $"{m_HumanDepthTextureInfo.descriptor.dimension.ToString()}.");
return m_HumanDepthTextureInfo.texture as Texture2D;
}
return null;
}
}
/// <summary>
/// Attempt to get the latest environment depth confidence CPU image. This provides direct access to the
/// raw pixel data.
/// </summary>
/// <remarks>
/// The `XRCpuImage` must be disposed to avoid resource leaks.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireEnvironmentDepthConfidenceCpuImage(out XRCpuImage cpuImage)
{
if (descriptor?.environmentDepthConfidenceImageSupported == Supported.Supported)
{
return subsystem.TryAcquireEnvironmentDepthConfidenceCpuImage(out cpuImage);
}
cpuImage = default;
return false;
}
/// <summary>
/// The environment depth confidence texture.
/// </summary>
/// <value>
/// The environment depth confidence texture, if any. Otherwise, <c>null</c>.
/// </value>
public Texture2D environmentDepthConfidenceTexture
{
get
{
if (descriptor?.environmentDepthConfidenceImageSupported == Supported.Supported
&& subsystem.TryGetEnvironmentDepthConfidence(out var environmentDepthConfidenceDescriptor))
{
m_EnvironmentDepthConfidenceTextureInfo = ARTextureInfo.GetUpdatedTextureInfo(m_EnvironmentDepthConfidenceTextureInfo,
environmentDepthConfidenceDescriptor);
DebugAssert.That(m_EnvironmentDepthConfidenceTextureInfo.descriptor.dimension == TextureDimension.Tex2D
|| m_EnvironmentDepthConfidenceTextureInfo.descriptor.dimension == TextureDimension.None)?.
WithMessage("Environment depth confidence texture needs to be a Texture 2D, but instead is "
+ $"{m_EnvironmentDepthConfidenceTextureInfo.descriptor.dimension.ToString()}.");
return m_EnvironmentDepthConfidenceTextureInfo.texture as Texture2D;
}
return null;
}
}
/// <summary>
/// Attempt to get the latest human depth CPU image. This provides direct access to the raw pixel data.
/// </summary>
/// <remarks>
/// The `XRCpuImage` must be disposed to avoid resource leaks.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireHumanDepthCpuImage(out XRCpuImage cpuImage)
{
if (descriptor?.humanSegmentationDepthImageSupported == Supported.Supported)
{
return subsystem.TryAcquireHumanDepthCpuImage(out cpuImage);
}
cpuImage = default;
return false;
}
/// <summary>
/// The environment depth texture.
/// </summary>
/// <value>
/// The environment depth texture, if any. Otherwise, <c>null</c>.
/// </value>
public Texture2D environmentDepthTexture
{
get
{
if (descriptor?.environmentDepthImageSupported == Supported.Supported
&& subsystem.TryGetEnvironmentDepth(out var environmentDepthDescriptor))
{
m_EnvironmentDepthTextureInfo = ARTextureInfo.GetUpdatedTextureInfo(m_EnvironmentDepthTextureInfo,
environmentDepthDescriptor);
DebugAssert.That(m_EnvironmentDepthTextureInfo.descriptor.dimension == TextureDimension.Tex2D
|| m_EnvironmentDepthTextureInfo.descriptor.dimension == TextureDimension.None)?.
WithMessage("Environment depth texture needs to be a Texture 2D, but instead is "
+ $"{m_EnvironmentDepthTextureInfo.descriptor.dimension.ToString()}.");
return m_EnvironmentDepthTextureInfo.texture as Texture2D;
}
return null;
}
}
/// <summary>
/// Attempt to get the latest environment depth CPU image. This provides direct access to the raw pixel data.
/// </summary>
/// <remarks>
/// The `XRCpuImage` must be disposed to avoid resource leaks.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireEnvironmentDepthCpuImage(out XRCpuImage cpuImage)
{
if (descriptor?.environmentDepthImageSupported == Supported.Supported)
{
return subsystem.TryAcquireEnvironmentDepthCpuImage(out cpuImage);
}
cpuImage = default;
return false;
}
/// <summary>
/// Attempt to get the latest raw environment depth CPU image. This provides direct access to the raw pixel data.
/// </summary>
/// <remarks>
/// > [!NOTE]
/// > The `XRCpuImage` must be disposed to avoid resource leaks.
/// This differs from <see cref="TryAcquireEnvironmentDepthCpuImage"/> in that it always tries to acquire the
/// raw environment depth image, whereas <see cref="TryAcquireEnvironmentDepthCpuImage"/> depends on the value
/// of <see cref="environmentDepthTemporalSmoothingEnabled"/>.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireRawEnvironmentDepthCpuImage(out XRCpuImage cpuImage)
{
if (subsystem == null)
{
cpuImage = default;
return false;
}
return subsystem.TryAcquireRawEnvironmentDepthCpuImage(out cpuImage);
}
/// <summary>
/// Attempt to get the latest smoothed environment depth CPU image. This provides direct access to
/// the raw pixel data.
/// </summary>
/// <remarks>
/// > [!NOTE]
/// > The `XRCpuImage` must be disposed to avoid resource leaks.
/// This differs from <see cref="TryAcquireEnvironmentDepthCpuImage"/> in that it always tries to acquire the
/// smoothed environment depth image, whereas <see cref="TryAcquireEnvironmentDepthCpuImage"/>
/// depends on the value of <see cref="environmentDepthTemporalSmoothingEnabled"/>.
/// </remarks>
/// <param name="cpuImage">If this method returns `true`, an acquired `XRCpuImage`.</param>
/// <returns>Returns `true` if the CPU image was acquired. Returns `false` otherwise.</returns>
public bool TryAcquireSmoothedEnvironmentDepthCpuImage(out XRCpuImage cpuImage)
{
if (subsystem == null)
{
cpuImage = default;
return false;
}
return subsystem.TryAcquireSmoothedEnvironmentDepthCpuImage(out cpuImage);
}
/// <summary>
/// Callback before the subsystem is started (but after it is created).
/// </summary>
protected override void OnBeforeStart()
{
requestedHumanStencilMode = m_HumanSegmentationStencilMode;
requestedHumanDepthMode = m_HumanSegmentationDepthMode;
requestedEnvironmentDepthMode = m_EnvironmentDepthMode;
requestedOcclusionPreferenceMode = m_OcclusionPreferenceMode;
environmentDepthTemporalSmoothingRequested = m_EnvironmentDepthTemporalSmoothing;
ResetTextureInfos();
}
/// <summary>
/// Callback when the manager is being disabled.
/// </summary>
protected override void OnDisable()
{
base.OnDisable();
ResetTextureInfos();
InvokeFrameReceived();
}
/// <summary>
/// Callback as the manager is being updated.
/// </summary>
public void Update()
{
if (subsystem != null)
{
UpdateTexturesInfos();
InvokeFrameReceived();
requestedEnvironmentDepthMode = m_EnvironmentDepthMode;
requestedHumanDepthMode = m_HumanSegmentationDepthMode;
requestedHumanStencilMode = m_HumanSegmentationStencilMode;
requestedOcclusionPreferenceMode = m_OcclusionPreferenceMode;
environmentDepthTemporalSmoothingRequested = m_EnvironmentDepthTemporalSmoothing;
}
}
void ResetTextureInfos()
{
m_HumanStencilTextureInfo.Reset();
m_HumanDepthTextureInfo.Reset();
m_EnvironmentDepthTextureInfo.Reset();
m_EnvironmentDepthConfidenceTextureInfo.Reset();
}
/// <summary>
/// Pull the texture descriptors from the occlusion subsystem, and update the texture information maintained by
/// this component.
/// </summary>
void UpdateTexturesInfos()
{
var textureDescriptors = subsystem.GetTextureDescriptors(Allocator.Temp);
try
{
int numUpdated = Math.Min(m_TextureInfos.Count, textureDescriptors.Length);
// Update the existing textures that are in common between the two arrays.
for (int i = 0; i < numUpdated; ++i)
{
m_TextureInfos[i] = ARTextureInfo.GetUpdatedTextureInfo(m_TextureInfos[i], textureDescriptors[i]);
}
// If there are fewer textures in the current frame than we had previously, destroy any remaining unneeded
// textures.
if (numUpdated < m_TextureInfos.Count)
{
for (int i = numUpdated; i < m_TextureInfos.Count; ++i)
{
m_TextureInfos[i].Reset();
}
m_TextureInfos.RemoveRange(numUpdated, (m_TextureInfos.Count - numUpdated));
}
// Else, if there are more textures in the current frame than we have previously, add new textures for any
// additional descriptors.
else if (textureDescriptors.Length > m_TextureInfos.Count)
{
for (int i = numUpdated; i < textureDescriptors.Length; ++i)
{
m_TextureInfos.Add(new ARTextureInfo(textureDescriptors[i]));
}
}
}
finally
{
if (textureDescriptors.IsCreated)
{
textureDescriptors.Dispose();
}
}
}
/// <summary>
/// Invoke the occlusion frame received event with the updated textures and texture property IDs.
/// </summary>
void InvokeFrameReceived()
{
if (frameReceived != null)
{
int numTextureInfos = m_TextureInfos.Count;
m_Textures.Clear();
m_TexturePropertyIds.Clear();
m_Textures.Capacity = numTextureInfos;
m_TexturePropertyIds.Capacity = numTextureInfos;
for (int i = 0; i < numTextureInfos; ++i)
{
DebugAssert.That(m_TextureInfos[i].descriptor.dimension == TextureDimension.Tex2D)?.
WithMessage($"Texture needs to be a Texture 2D, but instead is {m_TextureInfos[i].descriptor.dimension.ToString()}.");
m_Textures.Add((Texture2D)m_TextureInfos[i].texture);
m_TexturePropertyIds.Add(m_TextureInfos[i].descriptor.propertyNameId);
}
subsystem.GetMaterialKeywords(out List<string> enabledMaterialKeywords, out List<string>disabledMaterialKeywords);
AROcclusionFrameEventArgs args = new AROcclusionFrameEventArgs();
args.textures = m_Textures;
args.propertyNameIds = m_TexturePropertyIds;
args.enabledMaterialKeywords = enabledMaterialKeywords;
args.disabledMaterialKeywords = disabledMaterialKeywords;
frameReceived(args);
}
}
}
}
使用EQ-R实现
EQ-R
简介
EQ-Renderer是EQ基于sceneform(filament)扩展的一个用于安卓端的三维AR渲染器。
主要功能
它包含sceneform_v1.16.0中九成接口(剔除了如sfb资源加载等已弃用的内容),扩展了视频背景视图、解决了sceneform模型加载的内存泄漏问题、集成了AREngine和ORB-SLAM3、添加了场景坐标与地理坐标系(CGCS-2000)的转换方法。
注:由于精力有限,文档和示例都不完善。sceneform相关请直接参考谷歌官方文档,扩展部分接口说明请移步git联系。
相关链接
Git仓库
- EQ-Renderer的示例工程
码云
- EQ-Renderer的示例工程
EQ-R相关文档
- 文档目录
使用示例
需要在安卓清单中添加其值设为“com.google.ar.core.depth>
接口调用
在使用ARSceneLayout 创建AR布局控件时,在适当的地方修改深度遮挡模式即可,示例如下。
ARSceneLayout layout = new ARSceneLayout(this);//使用普通3d视图
layout.getSceneView.getCameraStream()
setDepthOcclusionMode(DepthOcclusionMode.DEPTH_OCCLUSION_ENABLED);
实现方式
获取深度图和相机帧,在着色器中根据深度数据处理。
EQ-R基于filament
filament材质如下:
material {
name : depth,
shadingModel : unlit,
blending : opaque,
vertexDomain : device,
parameters : [
{
type : samplerExternal,
name : cameraTexture
},
{
type : sampler2d,
name : depthTexture
},
{
type : float4x4,
name : uvTransform
}
],
requires : [
uv0
]
}
fragment {
void material(inout MaterialInputs material) {
prepareMaterial(material);
material.baseColor.rgb = inverseTonemapSRGB(texture(materialParams_cameraTexture, getUV0()).rgb);
vec2 packed_depth = texture(materialParams_depthTexture, getUV0()).xy;
float depth_mm = dot(packed_depth, vec2(255.f, 256.f * 255.f));
vec4 view = mulMat4x4Float3(getClipFromViewMatrix(), vec3(0.f, 0.f, -depth_mm / 1000.f));
float ndc_depth = view.z / view.w;
gl_FragDepth = 1.f - ((ndc_depth + 1.f) / 2.f);
}
}
vertex {
void materialVertex(inout MaterialVertexInputs material) {
material.uv0 = mulMat4x4Float3(materialParams.uvTransform, vec3(material.uv0.x, material.uv0.y, 0.f)).xy;
}
}
示例应用
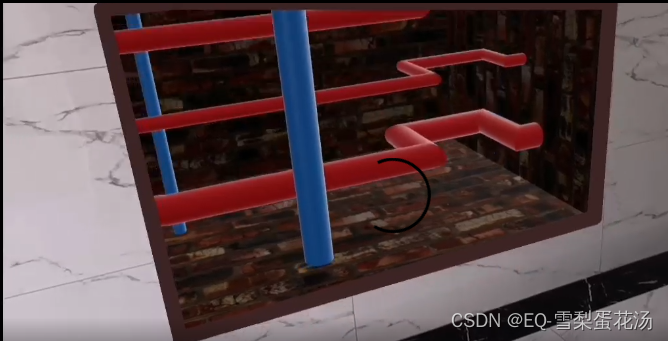
之前基于Android(Java)做过的示例应用。
管线巡检示例 :开挖显示、卷帘效果…