经典的目标检测方法
one-stage 单阶段法:YOLO系列
- one-stage方法:仅使用一个CNN,直接在特征图上预测每个物体的类别和边界框
- 输入图像之后,使用CNN网络提取特征图,不加入任何补充(锚点、锚框),直接输出预测框左上右下角的坐标(回归任务)以及物体的类别(分类任务)
- 即该CNN网络在单次前向传播中,不仅提取特征,还要预测每个物体的类别和边界框

- 优点:速度非常快,适合做实时检测任务
- 缺点:效果通常不会太好
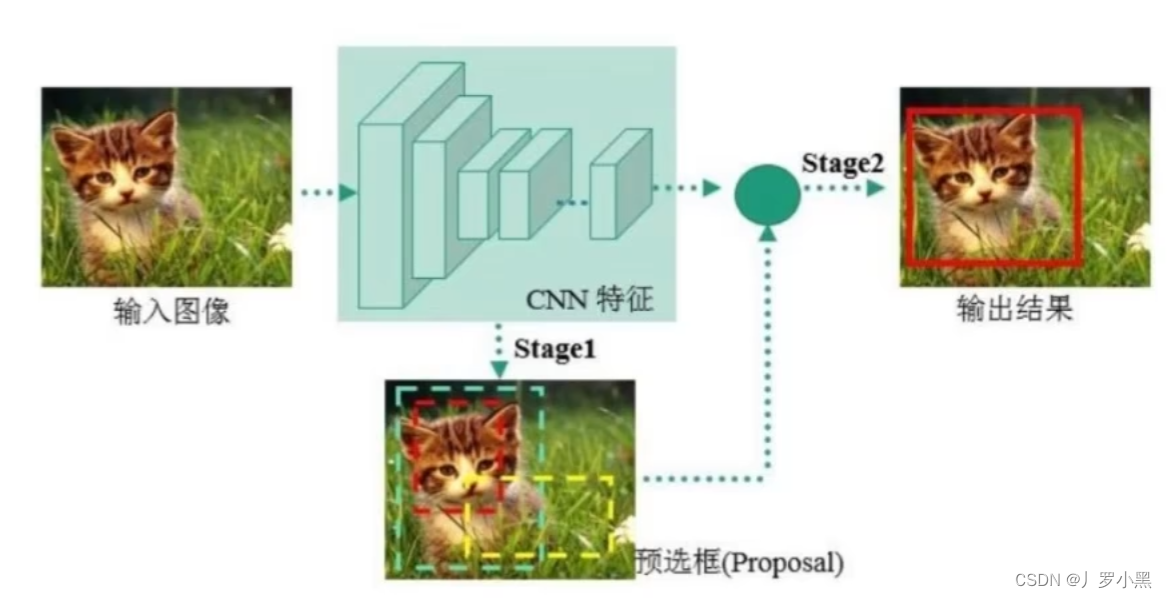
two-stage 两阶段:Faster-RCNN 、 Mask-RCNN系列
- two-stage方法:使用多个网络组件,CNN、RPN等,而CNN仅用来提取特征图,在最后包含全连接层的网络上输出每个物体的类别和边界框
- 一阶段,区域提议:输入图像之后,会先经过CNN网络,生成特征图。在将特征图送入RPN(区域提议网络)生成一系列区域提议(锚框),RPN根据这些锚框,输出这些锚框包含物体的概率(二分类:前景、背景),以及锚框与真实边界框的偏移量,应用该偏移量后得到候选框(提议区域)
- 二阶段,检测:对于每个提议区域(RoI),先将其映射回特征图的对应区域,再使用RoI池化、RoI Align等方法,从特征图对应区域中提取固定尺寸大小的特征,并将这些特征送入检测网络,得到最后选择的候选框中的类别概率(多分类:具体哪一个物体)、从候选框到真实边界框的偏移量。并应用该偏移量后得到最后的预测框。(训练阶段)
- 在测试阶段,由于我们不知道真实框,所以有可能多个预测框检测到同一物体,最后需要使用NMS来过滤这些重复框。最后根据置信度阈值来输出类别、相应置信度得分、以及预测的目标边界框
- 注意,在RPN和测试时的检测阶段都会使用NMS操作:
- 在RPN中,我们先使用NMS来筛选锚框,选择高质量的锚框来进行损失计算,此时虽然使用了NMS,但是不会唯一确定与真实框对应的锚框,反而会选择一个合理数量(例如256个)的锚框,来进行下一步的损失计算
- 在测试时的检测阶段,我们会在得到预测框后,使用NMS来确定唯一对应的预测框,并进行输出
- 但是在训练时的检测阶段,我们不会用NMS来减少预测框,因为我们需要所有预测框对模型训练的贡献
- 注意,虽然在RPN和检测阶段都会使用真实边界框来计算偏移量:
- 但是在RPN中,通过计算真实边界框和锚框的IoU来判断正负样本,以及通过计算正样本的锚框和真实边界框的偏移量,来训练RPN,使它学会如何调整锚框来更好的覆盖真实物体,并应用偏移量后得到候选框。(较为粗略的候选框)
- 在检测阶段中,仍然计算通过计算真实边界框和候选框的IoU,但是得到具体的物体类别,以及通过计算候选框和真实边界框的偏移量,来训练检测网络,使它学会更精细的调整候选框来更好的覆盖该物体,并应用偏移量后得到最后的预测框。(更精细的预测框)
锚点、锚框
- 锚点、锚框作为额外补充的方法,主要用在two-stage的目标检测方法中,但是YOLOV2开始,也使用锚点、锚框来提升模型对不同尺寸和形状的物体的检测能力,但区别于two-stage的方法,YOLO仍然是在单个网络提过程中完成分类和边界框的回归。
- 在RPN(区域提议网络)中,锚点代表潜在的候选区域的中心,也是锚框的中心。
- 每个锚点可以生成多个锚框,而锚框则是作为候选框,用于覆盖图像中可能出现物体的不同位置和形状
- 在Fast R-CNN的RPN中,锚框就被用来预测物体的位置,而RPN会对每个锚框输出两个结果,一个是物体的存在概率,一个是锚框的调整参数(用来接近真实框)
特征图、特征向量
- 特征图是CNN中的概念,它表示输入图像经一系列卷积层、池化层处理后的得到的中间输出结果,特征图通常是三维的数据结构,具体为(高度,宽度,通道数),所以特征图保留了输入图片的位置信息。特征图通常出现在网络的中间层,代表输入数据的中间级特征
- 特征向量是一个一维数组,它表示输入数据经过网络最后几层全连接层的输出,用于描述输入数据的高级抽象特征。特征向量通常出现在网络的最后几层,代表输入数据的高级特征。