IMU状态预积分噪声模型
- IMU状态预积分噪声模型
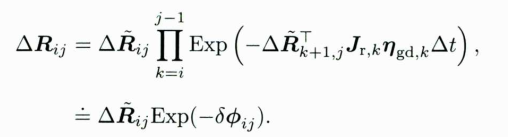
- 旋转部分
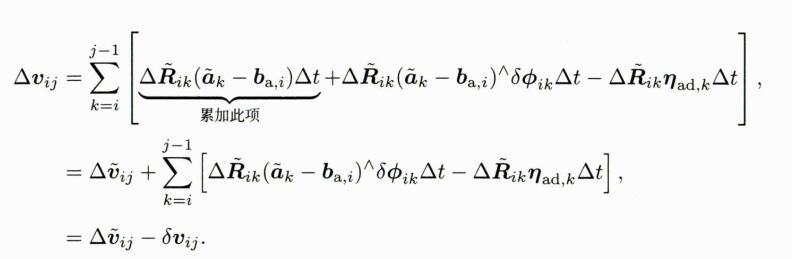
- 速度部分
- 平移部分
- 总结
IMU状态预积分噪声模型
根据之前的推导,得出了IMU状态预积分的测量模型,同时得到了噪声部分的定义公式,其中噪声部分罗列如下:

由于噪声项的定义比较复杂,需要将复杂的噪声项线性化,保留一阶系数,然后推导线性模型下的协方差矩阵变化。
旋转部分
首先从旋转部分的噪声开始

可以看到,作为随机变量的
δ
ϕ
i
j
\delta \phi _{ij}
δϕij只和随机变量
η
g
d
\eta _{gd}
ηgd有关,而且其它的都是确定的观测量。
线性化后取期望值时,由于
η
g
d
\eta _{gd}
ηgd为白噪声,因此
δ
ϕ
i
j
\delta \phi _{ij}
δϕij均值也为零。
为了分析它的协方差,需要对上面公式进行线性化。对两侧取Log,可得

上式又可以通过BCH进行线性近似。同时,由于内部的系数项
−
△
R
~
k
+
1
⊤
J
r
,
k
η
g
d
,
k
△
t
-\bigtriangleup \tilde{R} _{k+1}^{\top }J_{r,k}\eta _{gd,k}\triangle t
−△R~k+1⊤Jr,kηgd,k△t已经为噪声,接近于0,可以将BCH线性近似的右雅克比矩阵取为单位阵I,那么可以得到
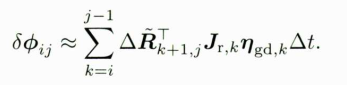
上式是高斯随机变量的线性组合,它的结果依然是高斯的。同时,由于预积分的累加特性,预积分观测量的噪声也会随着时间不断累加。
能否用第j-1时刻的噪声来计算第j时刻的噪声?如果可以,那么程序实现也会更简单。
答案:可以。
由于上式是累加形式的,因此很容易将其写成递推的形式:
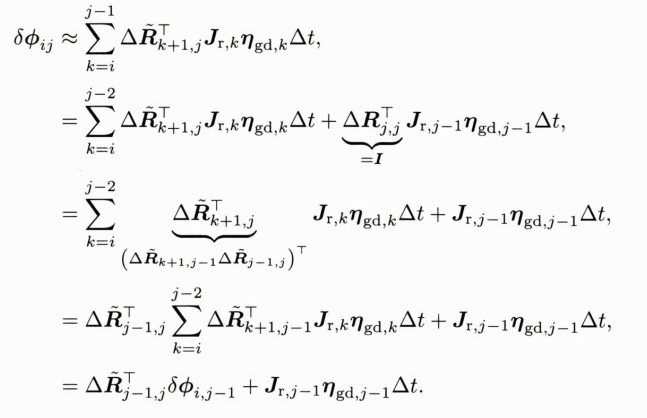
上式描述了如何从j-1时刻的噪声推断至j时刻。显然,这是一个线性系统。
设j-1时刻
δ
ϕ
i
,
j
−
1
\delta \phi _{i,j-1}
δϕi,j−1的协方差为
Σ
j
−
1
\Sigma _{j-1}
Σj−1,
η
g
d
\eta _{gd}
ηgd的协方差为
Σ
η
g
d
\Sigma _{\eta _{gd}}
Σηgd,那么:

这表明预积分误差会随着数据累积而变大,预积分观测量也会变得越来越不确定。这和实际情况是相符的。
速度部分
接下来考虑速度。与旋转部分相同,速度部分也可以写成高斯噪声变量的线性组合形式:

它也可以写成累加的形式:
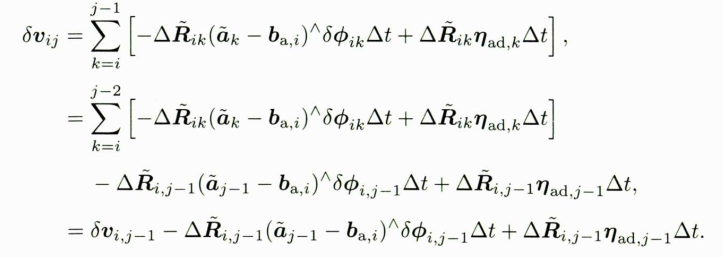
于是,
δ
v
i
j
\delta v_{ij}
δvij的协方差也可以根据累加系数来确定。
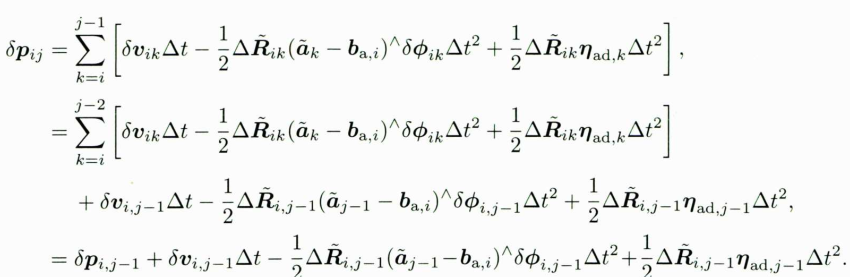
平移部分
对于平移部分也可以做速度部分同样的处理。直接列写平移部分噪声的累加形式:
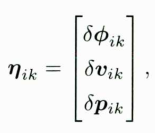
总结
上面推导了,如何从j-1时刻将噪声项递推至j时刻。
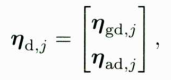
也可以将上面格式整理成矩阵形式。将三个噪声项合并成同一个:
并且把IMU的零偏噪声定义为
那么从
η
i
,
j
−
1
\eta _{i,j-1}
ηi,j−1至
η
i
,
j
\eta _{i,j}
ηi,j的递推式可以写作:

其中,系数矩阵
A
j
−
1
,
B
j
−
1
A_{j-1},B_{j-1}
Aj−1,Bj−1为

矩阵形式更清晰地显示了几个噪声项之间累积的递推关系。如果以协方差的形式来记录噪声,那么每次增加IMU观测时,噪声应该呈现逐渐增大的关系:

这里的Ak+1矩阵接近单位阵I,因此可以看成将噪声累加。
陀螺仪的噪声通过B矩阵进入旋转的观测量中,而加速度计的噪声则主要进入速度与平移估计中。






![HDFS [MSST‘10] 论文阅读笔记](https://img-blog.csdnimg.cn/direct/7d57e76bb72f4b78b9ab3d31f5069ef8.png#pic_center)

