自动驾驶中的多目标跟踪:第四篇

附赠自动驾驶学习资料和量产经验:链接
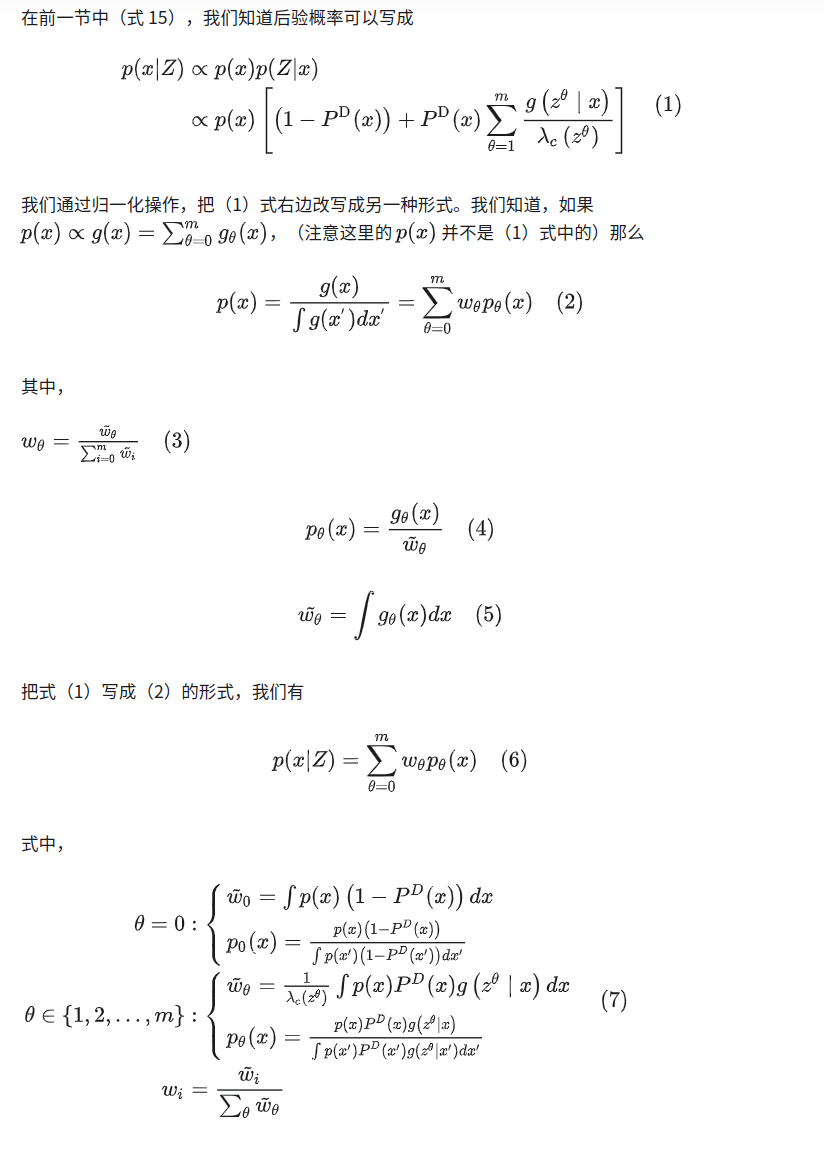
在上篇,我们得到了杂波背景下单目标状态的后验概率表达式。在不进行近似的情况下,是无法应用到实际场景中的。因此,在这一节,我们来讨论如何进行近似以及线性高斯条件下的几种典型算法。
(一)后验概率
(二)线性高斯条件下的解

我们会发现,式(11)对应的就是Kalman滤波的更新过程,即

至此,我们得到了在线性高斯假设下,先验是高斯随机变量,(one step, 一步)更新后的目标后验概率的具体表达式。再次强调一下目标先验的高斯仅仅包含一项,而由于量测来源的不确定性,更新后目标状态变成了混合高斯,含有**(m+1)**项高斯成分。可以预见地,随着时间步数的增加,后验概率中的混合高斯项会越来越多。显然,这是无法接受的。
(三)最近邻、概率数据互联与高斯和滤波
在这一节,我们介绍滤波算法对后验概率的近似。首先我们来看几种常见的近似手段。
(1)剪枝(pruning)
如果我们把后验概率中的每一项看作树的枝叶,那么剪枝就是修剪掉“细枝末节”。由于每一项的权重不同,有的项(权重大的项)是主要元素,有的项(权重小的项)是次要元素,因此剪枝的作用就是去掉那些权重小的项。

图中权重小的项(w1)被剪枝
(2)融合(merging)
融合就是将多个相似的项进行合并,使它们合并为一项。对于多个高斯项的融合而言,通常的做法是用一个新的高斯项去近似。

上图中的两个高斯项被合并成了一个新的高斯项(红色)
本节讨论的三种算法用到的近似手段如下:
-
最近邻滤波器(Nearest neighbor filter) [剪枝]
-
概率数据关联滤波器(Probabilistic data association filter) [融合]
-
高斯和滤波器(Gaussian sum filter) [剪枝/融合]
在下一节我详细介绍这三种算法的具体流程。