一,spi接口原理
SPI接口,即串行外设接口(Serial Peripheral Interface),是一种同步串行数据传输协议。它主要用于连接微处理器和各种外设,如存储器、传感器、ADC(模数转换器)和DAC(数模转换器)等。SPI接口以其高速、全双工、同步通信的特点,在嵌入式系统中得到广泛应用。
SPI接口的工作原理主要基于主从模式。在这种模式下,一个SPI设备作为主机(Master),负责控制通信过程,包括产生时钟信号和选择从设备(Slave)。而一个或多个SPI设备可以作为从设备,等待主机的指令来响应数据读写操作。
SPI接口在硬件上主要由四根线组成:MOSI(主设备输出/从设备输入)、MISO(主设备输入/从设备输出)、SCK(时钟信号)和CS(片选信号)。MOSI线用于主机向从机发送数据,MISO线用于从机向主机发送数据。SCK线由主机产生时钟信号,控制数据的传输速度。CS线用于主机选择特定的从设备进行通信。
在SPI通信过程中,主机首先通过CS线选中一个从设备,然后通过SCK线产生时钟信号。在每个时钟周期内,主机通过MOSI线发送一个数据位给从设备,同时从设备通过MISO线发送一个数据位给主机。这样,主机和从设备就完成了一个数据位的交换。通过连续的时钟周期,主机和从设备可以完成多个数据位的交换,从而完成一个完整的数据传输过程。
总的来说,SPI接口以其高速、全双工、同步通信的特点,以及简洁的硬件连接方式,为嵌入式系统提供了一种高效、可靠的数据传输方式。
1,SPI接口
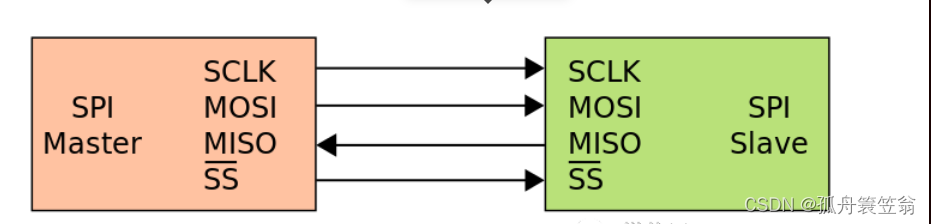
SPI总线是一种4线总线,通常有一个主设备和一个或多个从设备,需要至少4根线,事实上3根也可以。
MOSI:Master Output Slave Input,主设备数据输出,从设备数据输入;
MISO:Master Input Slave Output,主设备数据输入,从设备数据输出;
SCLK:Serial Clock,时钟信号,由主设备产生;
SS:Slave Select,从设备选择信号,由主设备控制;
 2,时钟信号的相位和极性
2,时钟信号的相位和极性
SPl_CR寄存器的CPOL和CPHA位,能够组合成四种可能的时序关系。
CPOL(时钟极性)位控制在没有数据传输时时钟的空闲状态电平,此位对主模式和从模式下的设备都有效。
如果CPOL被清’0’,SCK引脚在空闲状态保持低电平;
如果CPOL被置’1’,SCK引脚在空闲状态保持高电平。
如果CPHA(时钟相位)位被置’1’,SCK时钟的第二个边沿(CPOL位为0时就是下降沿,CPOL位为’1’时就是上升沿)进行数据位的采样,数据在第二个时钟边沿被锁存。
如果CPHA位被清’0’,SCK时钟的第一边沿(CPOL位为’0’时就是上升沿,CPOL位为’1’时就是下降沿)进行数据位采样,数据在第一个时钟边沿被锁存。
CPOL时钟极性和CPHA时钟相位的组合选择数据捕捉的时钟边沿。
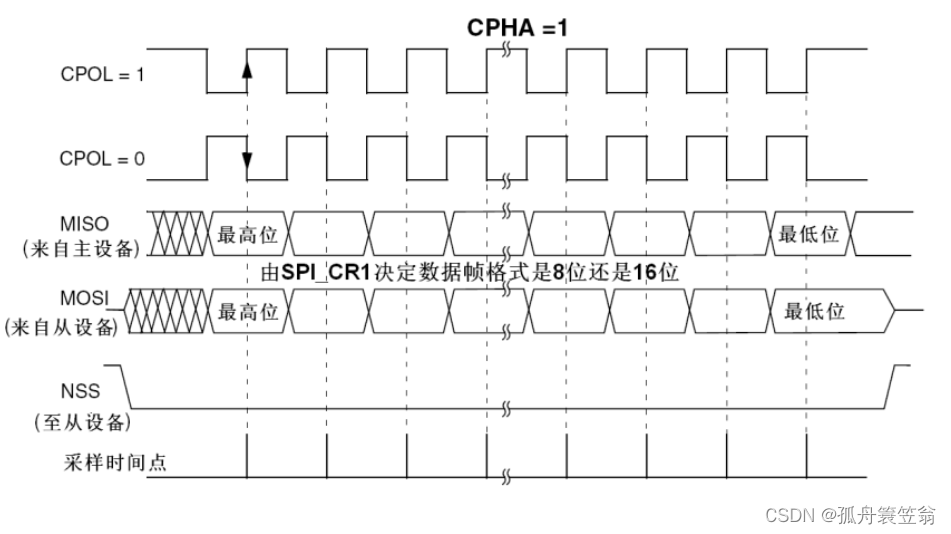 CPOL=1上升沿,CPOL=0下降沿时,采集数据。
CPOL=1上升沿,CPOL=0下降沿时,采集数据。
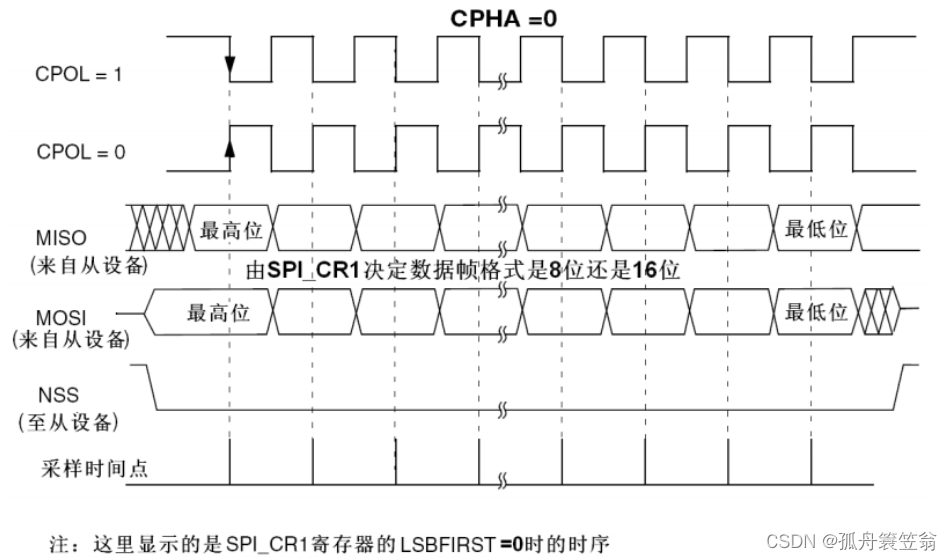 CPOL=1下降沿,CPOL=0上升沿时,采集数据。
CPOL=1下降沿,CPOL=0上升沿时,采集数据。
3,SPI工作原理总结:
硬件上为4根线。
主机和从机都有一个串行移位寄存器,主机通过向它的SPI串行寄存器写入一个字节来发起一次传输。
串行移位寄存器通过MOSI信号线将字节传送给从机,从机也将自己的串行移位寄存器中的内容通过MISO信号线返回给主机。这样,两个移位寄存器中的内容就被交换。
外设的写操作和读操作是同步完成的。如果只进行写操作,主机只需忽略接收到的字节;反之,若主机要读取从机的一个字节,就必须发送一个空字节来引发从机的传输。
二,SPI设备驱动框架
1)一条总线
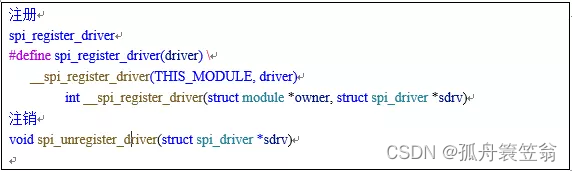
Spi总线,spi总线注册、注销
2)三个数据结构
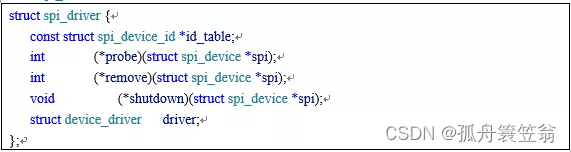
a、Spi_driver
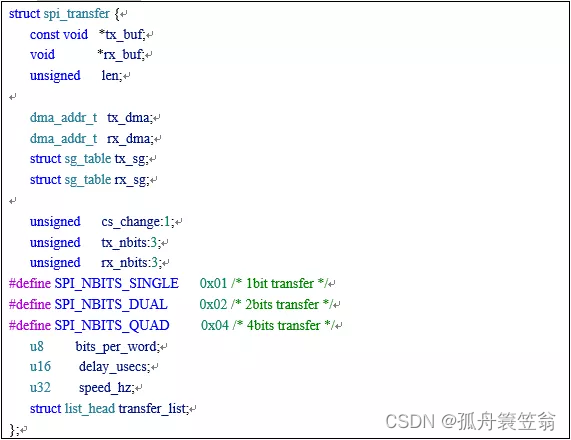
b、spi_transfer
这个结构体代表SPI通信中的一个具体传输操作。它包含了传输的数据缓冲区、传输的长度、速度、位序等参数。多个spi_transfer可以组合成一个spi_message,用于执行复杂的SPI通信任务。
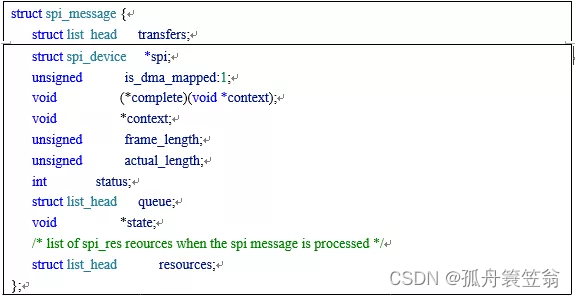
c、spi_message
这个结构体表示一个SPI消息,它包含了一个或多个SPI传输(由spi_transfer结构体表示)。消息是SPI通信的基本单位,可以包含多个连续的传输,这些传输可以具有不同的设置(如速度、位序等)。
3)spi设备驱动中实现读写接口
在Linux中,SPI设备驱动通过SPI核心库提供的API来实现读写操作。以下是一个简化的参考代码示例,展示了如何在SPI设备驱动中实现基本的读写功能:
首先,你需要包含必要的头文件,并定义你的SPI驱动和设备:
#include <linux/module.h>
#include <linux/spi/spi.h>
#include <linux/of.h>
#include <linux/of_device.h>
#include <linux/interrupt.h>
// SPI驱动结构
struct my_spi_driver {
struct spi_device *spi;
// 其他私有数据
};
// SPI传输描述
static int my_spi_transfer(struct spi_device *spi, const u8 *txbuf, u8 *rxbuf, size_t len)
{
struct spi_transfer t = {
.tx_buf = (void *)txbuf,
.rx_buf = rxbuf,
.len = len,
.speed_hz = spi->max_speed_hz,
.bits_per_word = 8, // 或者根据你的SPI设备设置为其他值
};
struct spi_message m;
spi_message_init(&m);
spi_message_add_tail(&t, &m);
return spi_sync(spi, &m);
}
// SPI驱动探测函数
static int my_spi_probe(struct spi_device *spi)
{
struct my_spi_driver *driver;
int ret;
// 分配驱动结构体内存
driver = devm_kzalloc(&spi->dev, sizeof(*driver), GFP_KERNEL);
if (!driver)
return -ENOMEM;
// 初始化驱动结构体
driver->spi = spi;
spi_set_drvdata(spi, driver);
// 假设我们有一个简单的读写操作
u8 tx_data[] = { 0x01, 0x02, 0x03 };
u8 rx_data[ARRAY_SIZE(tx_data)];
// 执行SPI读写操作
ret = my_spi_transfer(spi, tx_data, rx_data, ARRAY_SIZE(tx_data));
if (ret) {
dev_err(&spi->dev, "SPI transfer failed\n");
return ret;
}
// 处理接收到的数据
// ...
return 0;
}
// SPI驱动移除函数
static int my_spi_remove(struct spi_device *spi)
{
// 清理资源
struct my_spi_driver *driver = spi_get_drvdata(spi);
// ...
return 0;
}
// SPI驱动结构
static struct spi_driver my_spi_driver = {
.driver = {
.name = "my_spi_driver",
.owner = THIS_MODULE,
.of_match_table = my_spi_of_match, // 如果使用设备树,需要定义这个
},
.probe = my_spi_probe,
.remove = my_spi_remove,
// 如果你的驱动支持ID表匹配,添加.id_table
};
module_spi_driver(my_spi_driver);
MODULE_LICENSE("Dual BSD/GPL");
在这个示例中,my_spi_transfer 函数封装了SPI传输的通用逻辑。它创建了一个spi_transfer结构体,用于描述一次SPI传输,然后调用spi_sync函数来同步执行这次传输。