文章目录
- 前言
- 一、设计框图
- 二、GT_module
- 三、PHY_module
- 3.1、PHY_tx模块
- 3.2、PHY_rx_bitsync模块
- 3.3、PHY_rx模块
- 四、上板测试
前言
有了对64B66B协议的认识以及我们之前设计8B10B自定义PHY的经验,本文开始对64B66B自定义PHY的设计
一、设计框图
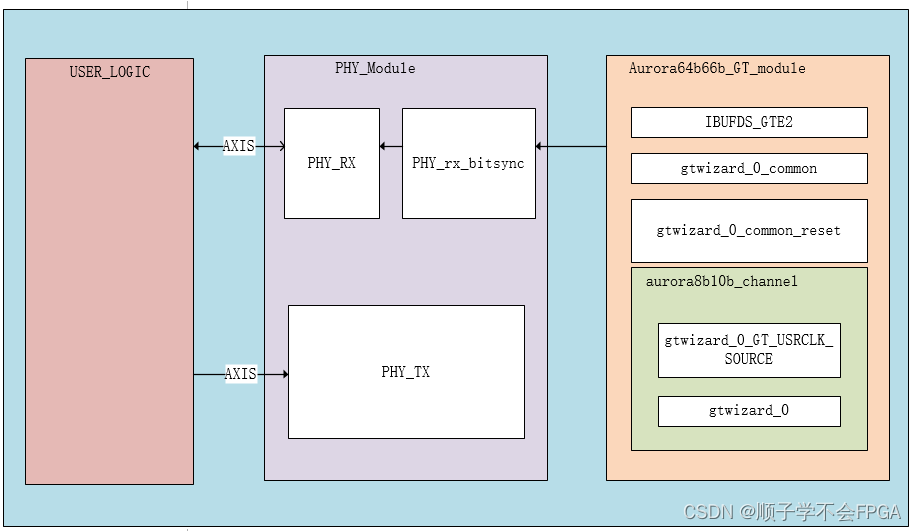
二、GT_module
该模块整体设计与8B10B几乎一致,只有一些端口的区别;再就是将QPLL复位产生模块gtwizard_0_common_reset从GT_channel模块放到了GT_module模块,但其实本质没有任何区别。
主要还是IP核配置变为64B66B之后输入输出的接口有一些变化,包括帧头信号,对齐信号以及发送队列计数器信号等。
同理,用户需要多个channel的时候只需要在GT_module模块当中例化多个GT_channel模块即可。
module GT_channel(
input i_sysclk ,
input i_gtrefclk ,
input i_rx_rst ,
input i_tx_rst ,
output o_tx_done ,
output o_rx_done ,
input i_tx_polarity ,
input [3 :0] i_tx_diffctrl ,
input [4 :0] i_txpostcursor ,
input [4 :0] i_txpercursor ,
input i_rx_polarity ,
input [2 :0] i_loopback ,
input [8 :0] i_drpaddr ,
input i_drpclk ,
input [15:0] i_drpdi ,
output [15:0] o_drpdo ,
input i_drpen ,
output o_drprdy ,
input i_drpwe ,
input i_qplllock ,
input i_qpllrefclklost ,
output o_qpllreset ,
input i_qplloutclk ,
input i_qplloutrefclk ,
input i_data_valid ,
output o_rx_clk ,
output [63:0] o_rx_data ,
output o_rx_valid ,
output [1 :0] o_rx_header ,
output o_rx_header_valid ,
input i_rx_slipbit ,
output o_tx_clk ,
input [63:0] i_tx_data ,
input [1 :0] i_tx_header ,
input [6 :0] i_tx_sequence ,
output o_gt_tx_p ,
output o_gt_tx_n ,
input i_gt_rx_p ,
input i_gt_rx_n
);
三、PHY_module
PHY层对数据进行组包和对齐的处理是难点所在
设计思路及代码思路参考了FPGA奇哥系列网课
3.1、PHY_tx模块
发送端工作流程:
- 空闲时期拉高READY,用户数据进入FIFO,s_axis_last断言后拉低READY
- FIFO不为空的时候从FIFO当中读出数据进行组帧
- 当前数据帧发送完毕重新拉高READY
- 大小端处理
发送数据时需要注意:每发送32个64bit数据之后用户需要暂停发送一拍数据,因为此时Gearbox需要将自己缓存的64bit数据吐出去。 从下图波形上看,sequence计数到31后,第32拍的用户数据是没办法被正常发送的,所以我们需要将该数据延迟到下一拍发送,所以图中的32和0时候的数据是一样的。
这个逻辑通过信号w_gt_send_valid 实现,达到30的时候拉低w_gt_send_valid ,这是因为还要考虑组帧时候的FIFO读潜伏期。
assign w_gt_send_valid = ro_tx_sequence == 30 ? 0 : 1 ;

以上情况很好处理,但是如果刚刚好是在FIFO读使能拉高的时候w_gt_send_valid被拉低(下图所示),组帧逻辑就会混乱,主要是数据不会在ro_tx_sequence为32和0的时候保持不变,因此加入一个r_invalid用来处理这种情况,这里有点过于复杂了,还是需要多看看波形图进行分析,应该有比较简单的办法的。
不过思想是很简单的:就是保证在ro_tx_sequence == 32和ro_tx_sequence == 0的时候输出数据要连续保持,才能使得数据不会丢失。

最后一点就是大小端处理,我个人习惯处理数据按照大端处理,在最后发送的时候一次性转为小端模式。
assign o_tx_data = { ro_tx_data[7 : 0],ro_tx_data[15: 8],ro_tx_data[23:16],ro_tx_data[31:24],
ro_tx_data[39:32],ro_tx_data[47:40],ro_tx_data[55:48],ro_tx_data[63:56]};
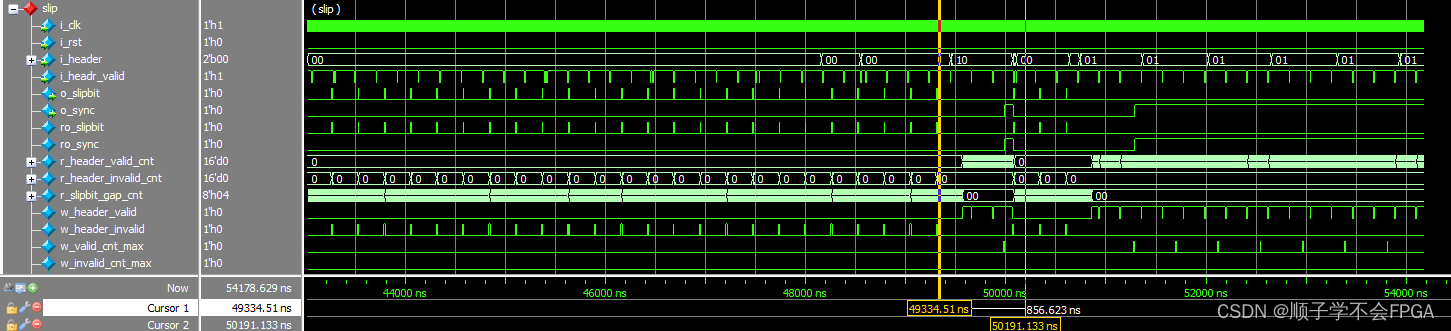
3.2、PHY_rx_bitsync模块
该模块实现接收端字节对齐的功能
整体思路很简单:下图为xilinx手册ug476当中对示例文件的介绍。
大致思维:
- 在64B66B当中,只有2;b10和2’b01俩种帧头是有效的,所以我们只需要判断帧头是否是有效的,就可以判断当前字节是否对齐。
- 当检测到错误帧头时,拉高一个slipbit脉冲信号,那么Gearbox会自动将对齐窗口向后滑动一个比特,注意:每次拉高slipbit脉冲信号的时候至少要隔32个RXUSRCLK2时钟周期
- 为了防止误判,只有当连续收到64个正确头的时候,才会判定为当前成功对齐,随后释放PHY_rx的复位,进行正常数据接收。
- 在xilinx文档当中的状态机还增加了重新复位接受模块的状态,就是判定对齐之后,当连续收到16个错误头后判断对齐出现了错误,重新进行对齐(本工程当中没有这个状态,出现一个错误头立马复位,然后重新进行同步)。

下图为仿真波形,第一条黄线之前是进行不断同步的过程,每次同步之间相隔32时钟周期,俩条黄线之间是发生了错误判断的情况,但在收到一个错误帧头后立马重新开始了同步,第二条黄线(有点看不清,可以看下面黄色框框位置)后是正常同步。
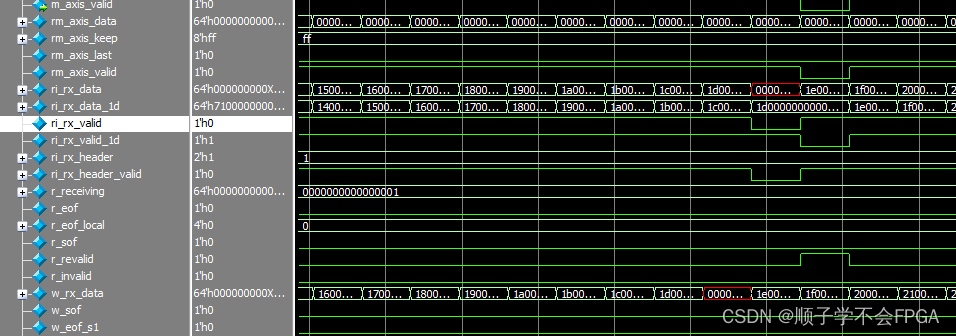
3.3、PHY_rx模块
接收端处理流程:
- 先将GT输入数据进行大小端转换
- 识别到SOF之后开始恢复数据
- 识别EOF以及EOF位置
- 根据EOF位置处理最后一拍数据以及KEEP信号
同样的,在接收数据的时候,每隔32时钟周期就有一个无效数据,进行VALID信号处理的时候需要考虑该情况。这里还有一点很重要,那就是识别到SOF后紧接着这个无效数据就来了,这种情况也是需要单独讨论的,接收端的r_invalid信号就是用来处理这种情况的。
主要代码:
always@(posedge i_rx_clk,posedge i_rx_rst)
begin
if(i_rx_rst)
rm_axis_data <= 'd0;
else if(r_eof && (r_eof_local < 7 && r_eof_local > 0))
rm_axis_data <= {ri_rx_data_1d[47:0],16'd0};
else if(w_eof && (w_eof_local == 0))
rm_axis_data <= {ri_rx_data_1d[55:0],8'd0};
else if(w_eof && (w_eof_local <= 7))
rm_axis_data <= {ri_rx_data_1d[55:0],ri_rx_data[55:48]};
else if(r_receiving && ri_rx_valid)
rm_axis_data <= {ri_rx_data_1d[55:0],ri_rx_data[63:56]};
else
rm_axis_data <= 'd0;
end
always@(posedge i_rx_clk,posedge i_rx_rst)
begin
if(i_rx_rst)
rm_axis_keep <= 8'b1111_1111;
else if(r_eof && (r_eof_local < 7 && r_eof_local > 0))
case(r_eof_local)
1 :rm_axis_keep <= 8'b1111_1100;
2 :rm_axis_keep <= 8'b1111_1000;
3 :rm_axis_keep <= 8'b1111_0000;
4 :rm_axis_keep <= 8'b1110_0000;
5 :rm_axis_keep <= 8'b1100_0000;
6 :rm_axis_keep <= 8'b1000_0000;
default :rm_axis_keep <= 8'b1111_1111;
endcase
else if(w_eof && (w_eof_local == 0 || w_eof_local == 7))
case(w_eof_local)
0 :rm_axis_keep <= 8'b1111_1110;
7 :rm_axis_keep <= 8'b1111_1111;
default :rm_axis_keep <= 8'b1111_1111;
endcase
else
rm_axis_keep <= 8'b1111_1111;
end
always@(posedge i_rx_clk,posedge i_rx_rst)
begin
if(i_rx_rst)
rm_axis_last <= 'd0;
else if(rm_axis_last && rm_axis_valid)
rm_axis_last <= 'd0;
else if(rm_axis_valid && r_eof && (r_eof_local < 7 && r_eof_local > 0))
rm_axis_last <= 'd1;
else if(rm_axis_valid && w_eof && (w_eof_local == 7 || w_eof_local == 0))
rm_axis_last <= 'd1;
else
rm_axis_last <= rm_axis_last;
end
always@(posedge i_rx_clk,posedge i_rx_rst)
begin
if(i_rx_rst)
rm_axis_valid <= 'd0;
else if(r_sof)
rm_axis_valid <= 'd1;
else if(rm_axis_last && rm_axis_valid)
rm_axis_valid <= 'd0;
else if((!ri_rx_valid && ri_rx_header != 2'b10) || r_invalid)
rm_axis_valid <= 'd0;
else if(r_revalid)
rm_axis_valid <= 'd1;
else
rm_axis_valid <= rm_axis_valid;
end
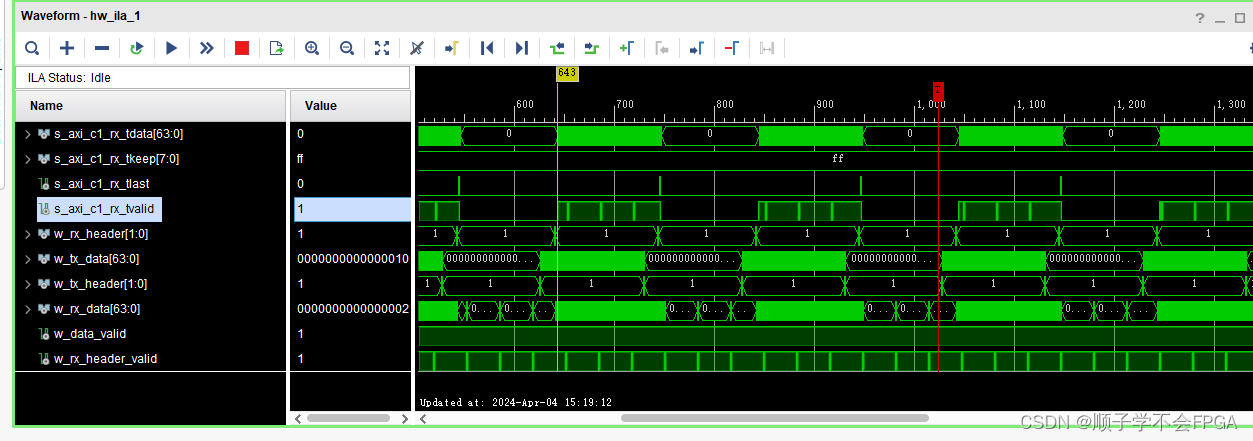
四、上板测试
暂时还没有加扰和解扰,所以直接光纤连接通信有点问题,这里是开启回环模式下上板测试结果,收发是正常的。