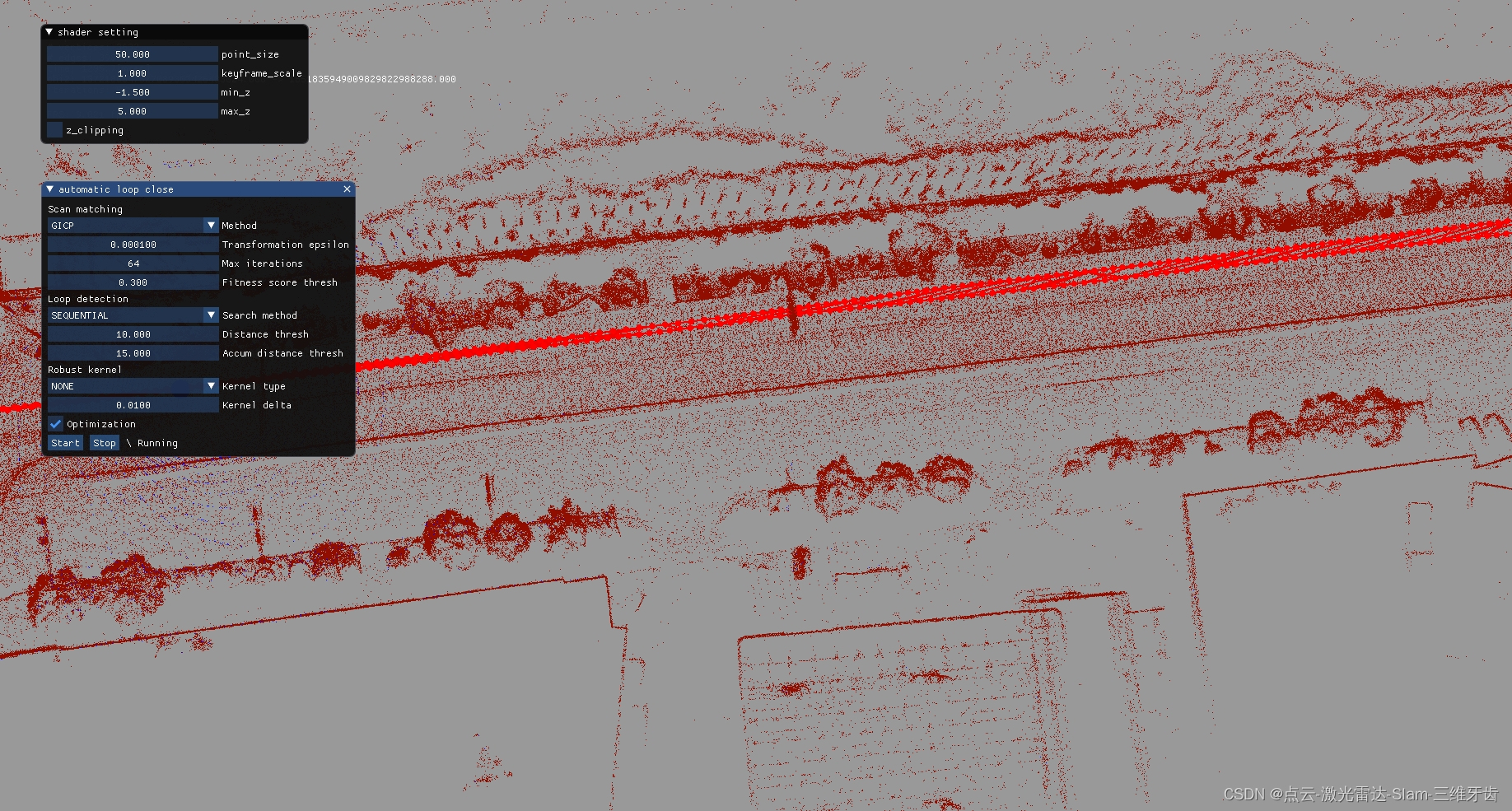
为了给 interactive-slam 提供数据做后端回环优化和手动回环优化,需要保存每帧的点云和每帧的里程计为单独的文件,并且需要保存的名字为ros时间戳。
效果很好,比我自己写的手动回环模块好用
// This is an advanced implementation of the algorithm described in the
// following paper:
// J. Zhang and S. Singh. LOAM: Lidar Odometry and Mapping in Real-time.
// Robotics: Science and Systems Conference (RSS). Berkeley, CA, July 2014.
// Modifier: Livox dev@livoxtech.com
// Copyright 2013, Ji Zhang, Carnegie Mellon University
// Further contributions copyright (c) 2016, Southwest Research Institute
// All rights reserved.
//
// Redistribution and use in source and binary forms, with or without
// modification, are permitted provided that the following conditions are met:
//
// 1. Redistributions of source code must retain the above copyright notice,
//




![[C#]使用OpencvSharp去除面积较小的连通域](https://img-blog.csdnimg.cn/direct/bef99417ea1f478a89ca365694155310.png)