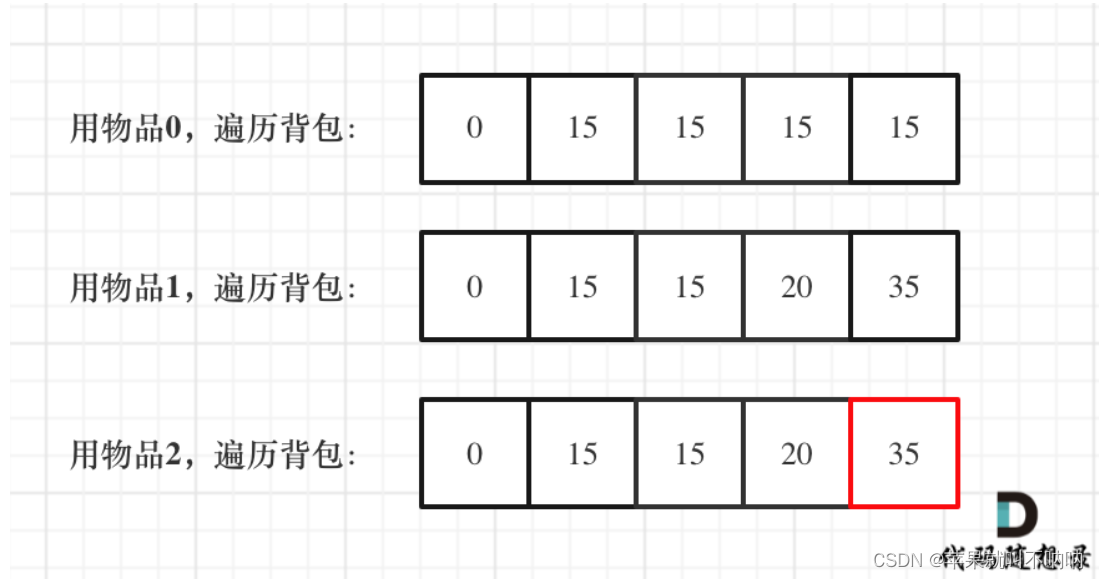
【C++介绍】
关于opencv实现有比较好的算法,可以参考这个博客OpenCV去除面积较小的连通域_c#opencv 筛选小面积区域-CSDN博客
但是没有对应opencvsharp实现同类算法,为了照顾懂C#编程同学们,因此将 去除面积较小的连通域算法转成C#代码。
方法一流程:
//=======函数实现=====================================================================
void RemoveSmallRegion(Mat &Src, Mat &Dst, int AreaLimit, int CheckMode, int NeihborMode)
{
int RemoveCount = 0;
//新建一幅标签图像初始化为0像素点,为了记录每个像素点检验状态的标签,0代表未检查,1代表正在检查,2代表检查不合格(需要反转颜色),3代表检查合格或不需检查
//初始化的图像全部为0,未检查
Mat PointLabel = Mat::zeros(Src.size(), CV_8UC1);
if (CheckMode == 1)//去除小连通区域的白色点
{
//cout << "去除小连通域.";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) < 10)
{
PointLabel.at<uchar>(i, j) = 3;//将背景黑色点标记为合格,像素为3
}
}
}
}
else//去除孔洞,黑色点像素
{
//cout << "去除孔洞";
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (Src.at<uchar>(i, j) > 10)
{
PointLabel.at<uchar>(i, j) = 3;//如果原图是白色区域,标记为合格,像素为3
}
}
}
}
vector<Point2i>NeihborPos;//将邻域压进容器
NeihborPos.push_back(Point2i(-1, 0));
NeihborPos.push_back(Point2i(1, 0));
NeihborPos.push_back(Point2i(0, -1));
NeihborPos.push_back(Point2i(0, 1));
if (NeihborMode == 1)
{
//cout << "Neighbor mode: 8邻域." << endl;
NeihborPos.push_back(Point2i(-1, -1));
NeihborPos.push_back(Point2i(-1, 1));
NeihborPos.push_back(Point2i(1, -1));
NeihborPos.push_back(Point2i(1, 1));
}
else int a = 0;//cout << "Neighbor mode: 4邻域." << endl;
int NeihborCount = 4 + 4 * NeihborMode;
int CurrX = 0, CurrY = 0;
//开始检测
for (int i = 0; i < Src.rows; i++)
{
for (int j = 0; j < Src.cols; j++)
{
if (PointLabel.at<uchar>(i, j) == 0)//标签图像像素点为0,表示还未检查的不合格点
{ //开始检查
vector<Point2i>GrowBuffer;//记录检查像素点的个数
GrowBuffer.push_back(Point2i(j, i));
PointLabel.at<uchar>(i, j) = 1;//标记为正在检查
int CheckResult = 0;
for (int z = 0; z < GrowBuffer.size(); z++)
{
for (int q = 0; q < NeihborCount; q++)
{
CurrX = GrowBuffer.at(z).x + NeihborPos.at(q).x;
CurrY = GrowBuffer.at(z).y + NeihborPos.at(q).y;
if (CurrX >= 0 && CurrX<Src.cols&&CurrY >= 0 && CurrY<Src.rows) //防止越界
{
if (PointLabel.at<uchar>(CurrY, CurrX) == 0)
{
GrowBuffer.push_back(Point2i(CurrX, CurrY)); //邻域点加入buffer
PointLabel.at<uchar>(CurrY, CurrX) = 1; //更新邻域点的检查标签,避免重复检查
}
}
}
}
if (GrowBuffer.size()>AreaLimit) //判断结果(是否超出限定的大小),1为未超出,2为超出
CheckResult = 2;
else
{
CheckResult = 1;
RemoveCount++;//记录有多少区域被去除
}
for (int z = 0; z < GrowBuffer.size(); z++)
{
CurrX = GrowBuffer.at(z).x;
CurrY = GrowBuffer.at(z).y;
PointLabel.at<uchar>(CurrY, CurrX) += CheckResult;//标记不合格的像素点,像素值为2
}
//********结束该点处的检查**********
}
}
}
CheckMode = 255 * (1 - CheckMode);
//开始反转面积过小的区域
for (int i = 0; i < Src.rows; ++i)
{
for (int j = 0; j < Src.cols; ++j)
{
if (PointLabel.at<uchar>(i, j) == 2)
{
Dst.at<uchar>(i, j) = CheckMode;
}
else if (PointLabel.at<uchar>(i, j) == 3)
{
Dst.at<uchar>(i, j) = Src.at<uchar>(i, j);
}
}
}
//cout << RemoveCount << " objects removed." << endl;
}
//=======函数实现=====================================================================
//=======调用函数=====================================================================
Mat img;
img = imread("D:\\1_1.jpg", 0);//读取图片
threshold(img, img, 128, 255, CV_THRESH_BINARY_INV);
imshow("去除前", img);
Mat img1;
RemoveSmallRegion(img, img, 200, 0, 1);
imshow("去除后", img);
waitKey(0);
//=======调用函数=====================================================================
此段代码包含一个名为RemoveSmallRegion的函数,其功能是从给定的二值图像中移除符合条件的小连通区域。函数接受五个参数:
Mat &Src: 输入的原始二值图像(单通道,通常为黑白图像)。Mat &Dst: 输出的目标图像,存储经过处理后的结果。int AreaLimit: 面积阈值,低于该阈值的连通区域会被移除。int CheckMode: 检查模式,决定要移除的是图像中的小连通白区还是小连通黑区。CheckMode == 1: 移除小连通白区(白色像素点构成的区域)。CheckMode == 0: 移除小连通黑区(黑色像素点构成的区域)。
int NeihborMode: 邻域模式,决定采用4邻域还是8邻域算法进行连通区域扩展。NeihborMode == 1: 使用8邻域算法(包括上下左右和四个对角方向相邻的像素)。NeihborMode == 0: 使用4邻域算法(仅考虑上下左右相邻的像素)。
函数的具体实现步骤如下:
-
初始化
RemoveCount变量记录移除的连通区域数量,创建与输入图像相同大小的PointLabel矩阵作为标签图像,用于记录每个像素点的检验状态(0:未检查;1:正在检查;2:检查不合格;3:检查合格或无需检查)。 -
根据
CheckMode确定移除目标,分别针对小连通白区和小连通黑区对PointLabel进行初始化。对于不需要移除的像素点(即背景或前景),将其标签设为3,表示已检查且合格。 -
定义
NeihborPos容器存储邻域位置,并根据NeihborMode选择使用4邻域或8邻域。 -
使用两层嵌套循环遍历输入图像的所有像素点。对于未检查的像素点(标签为0),执行以下操作:
- 初始化
GrowBuffer容器,用于记录当前连通区域内的像素点。 - 将当前像素点标记为正在检查(标签设为1),并启动基于邻域扩展的生长过程。
- 使用广度优先搜索(BFS)策略,依次访问
GrowBuffer中的像素点及其邻域像素,将未检查的邻域像素加入GrowBuffer并标记为正在检查。 - 当遍历完所有邻域像素后,根据
GrowBuffer的大小与AreaLimit比较,判断该连通区域是否应被移除。 - 根据判断结果更新
GrowBuffer内所有像素点在PointLabel上的标签为2(检查不合格)或保持为1(检查合格)。
- 初始化
-
得到最终的
PointLabel后,根据CheckMode对255取反(即255 * (1 - CheckMode)),用于后续翻转图像像素值。遍历Src和PointLabel,将标签为2的像素点在Dst中翻转颜色(即将白变黑或黑变白),标签为3的像素点保持原色不变。
最后,代码提供了对RemoveSmallRegion函数的调用示例:
- 读取图像"D:\1_1.jpg",并对其进行二值化处理(阈值为128,反相)。
- 显示二值化处理后的原始图像。
- 调用
RemoveSmallRegion函数,移除面积小于200的黑区(CheckMode = 0),使用8邻域算法(NeihborMode = 1)。 - 显示经过处理后的图像。
- 等待用户按键后关闭窗口。
方法二流程:
//测试
void CCutImageVS2013Dlg::OnBnClickedTestButton1()
{
vector<vector<Point> > contours; //轮廓数组
vector<Point2d> centers; //轮廓质心坐标
vector<vector<Point> >::iterator itr; //轮廓迭代器
vector<Point2d>::iterator itrc; //质心坐标迭代器
vector<vector<Point> > con; //当前轮廓
double area;
double minarea = 1000;
double maxarea = 0;
Moments mom; // 轮廓矩
Mat image, gray, edge, dst;
image = imread("D:\\66.png");
cvtColor(image, gray, COLOR_BGR2GRAY);
Mat rgbImg(gray.size(), CV_8UC3); //创建三通道图
blur(gray, edge, Size(3, 3)); //模糊去噪
threshold(edge, edge, 200, 255, THRESH_BINARY_INV); //二值化处理,黑底白字
//--------去除较小轮廓,并寻找最大轮廓--------------------------
findContours(edge, contours, CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE); //寻找轮廓
itr = contours.begin(); //使用迭代器去除噪声轮廓
while (itr != contours.end())
{
area = contourArea(*itr); //获得轮廓面积
if (area<minarea) //删除较小面积的轮廓
{
itr = contours.erase(itr); //itr一旦erase,需要重新赋值
}
else
{
itr++;
}
if (area>maxarea) //寻找最大轮廓
{
maxarea = area;
}
}
dst = Mat::zeros(image.rows, image.cols, CV_8UC3);
/*绘制连通区域轮廓,计算质心坐标*/
Point2d center;
itr = contours.begin();
while (itr != contours.end())
{
area = contourArea(*itr);
con.push_back(*itr); //获取当前轮廓
if (area == maxarea)
{
vector<Rect> boundRect(1); //定义外接矩形集合
boundRect[0] = boundingRect(Mat(*itr));
cvtColor(gray, rgbImg, COLOR_GRAY2BGR);
Rect select;
select.x = boundRect[0].x;
select.y = boundRect[0].y;
select.width = boundRect[0].width;
select.height = boundRect[0].height;
rectangle(rgbImg, select, Scalar(0, 255, 0), 3, 2); //用矩形画矩形窗
drawContours(dst, con, -1, Scalar(0, 0, 255), 2); //最大面积红色绘制
}
else
drawContours(dst, con, -1, Scalar(255, 0, 0), 2); //其它面积蓝色绘制
con.pop_back();
//计算质心
mom = moments(*itr);
center.x = (int)(mom.m10 / mom.m00);
center.y = (int)(mom.m01 / mom.m00);
centers.push_back(center);
itr++;
}
imshow("rgbImg", rgbImg);
//imshow("gray", gray);
//imshow("edge", edge);
imshow("origin", image);
imshow("connected_region", dst);
waitKey(0);
return;
}
提供的代码为一个使用OpenCV库对输入图像"D:\66.png"进行处理的C++实现,执行以下任务:
-
图像预处理:
- 读取图像并将其从BGR色彩空间转换为灰度图像(
cvtColor)。 - 应用高斯模糊,使用大小为
3x3的核来减少噪声(blur)。 - 对模糊后的图像执行二值阈值处理,阈值设为
200,将高于该值的像素设置为白色,其余为黑色(threshold)。
- 读取图像并将其从BGR色彩空间转换为灰度图像(
-
轮廓检测与筛选:
- 使用
findContours函数在二值化图像上查找外部轮廓,存储在contours容器中。 - 遍历所有轮廓,通过
contourArea函数计算每个轮廓的面积。- 删除面积小于最小阈值
minarea(初始设定为1000)的噪声轮廓,使用迭代器itr进行动态删除。 - 同时记录下当前遍历到的最大轮廓面积
maxarea。
- 删除面积小于最小阈值
- 最后保留下来的轮廓为满足面积条件的有效轮廓。
- 使用
-
绘制轮廓与计算质心:
- 创建一个新的
Mat对象dst,用于绘制处理结果。 - 初始化一个空的
centers向量,用于存储各个轮廓的质心坐标。 - 再次遍历有效轮廓:
- 将当前轮廓添加到临时向量
con中。 - 计算当前轮廓面积。
- 如果面积等于最大面积
maxarea,则执行以下操作:- 计算当前轮廓的外接矩形,并用绿色边框在RGB图像
rgbImg上绘制。 - 在最终输出图像
dst上以红色绘制当前轮廓。
- 计算当前轮廓的外接矩形,并用绿色边框在RGB图像
- 否则,在
dst上以蓝色绘制当前轮廓。 - 使用
moments函数计算当前轮廓的矩,进而得到质心坐标,并将其添加到centers向量。 - 清除临时向量
con中的当前轮廓。
- 将当前轮廓添加到临时向量
- 显示各阶段处理结果:
- RGB图像
rgbImg(仅包含最大轮廓的绿色外接矩形)。 - 原始灰度图像
gray(注释掉未显示)。 - 二值边缘图像
edge(注释掉未显示)。
- RGB图像
- 创建一个新的
【C#版本效果展示】
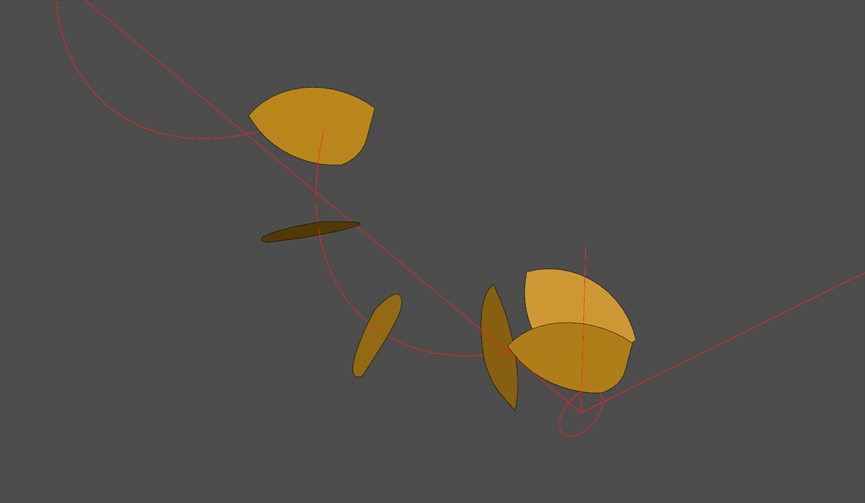
方法一使用opencvsharp效果:

方法二opencvsharp效果:
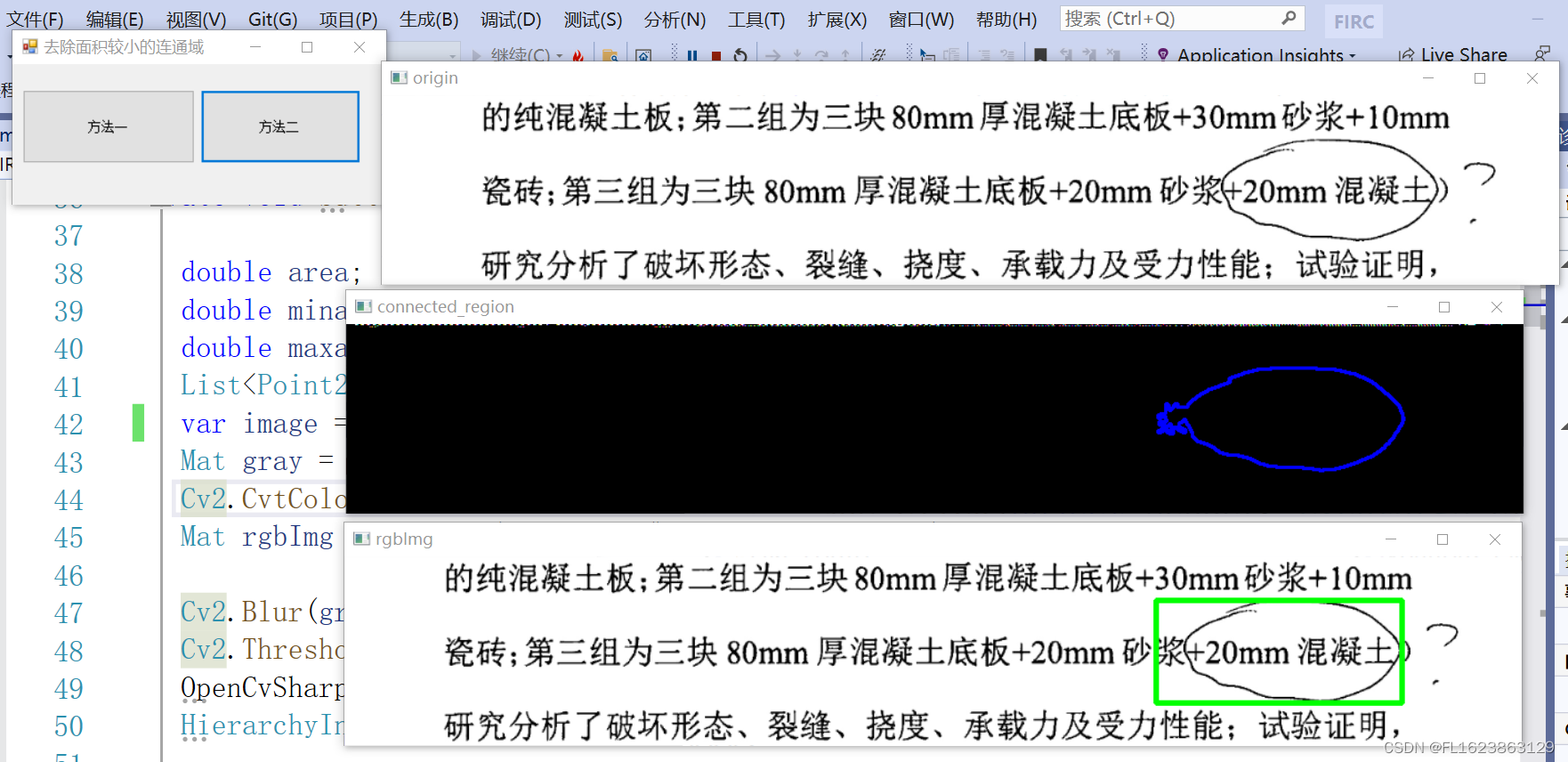
可见已经用opencvsharp复刻C++版本算法。
【测试环境】
vs2019
netframework4.7.2
opencvsharp4.8.0
【源码下载地址】
https://download.csdn.net/download/FL1623863129/89074335