SPI通信收发原理框图(F1系列)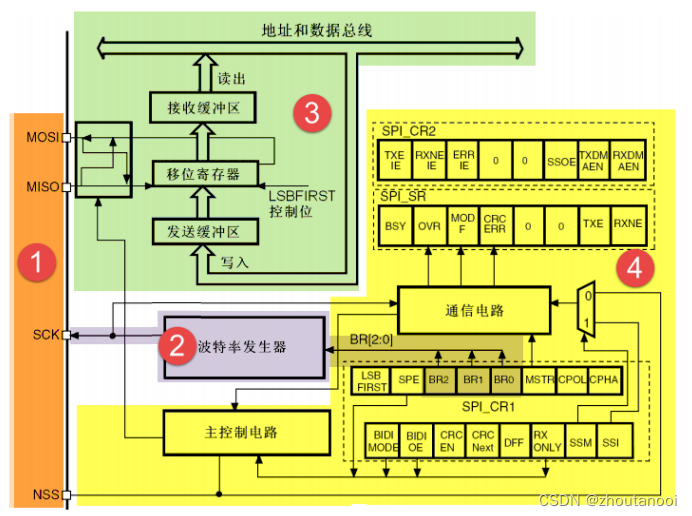
SPI 初始化结构体详解
typedef struct {
uint32_t Mode; /* 设置 SPI 的主/从机端模式 */
uint32_t Direction; /* 设置 SPI 的单双向模式 */
uint32_t DataSize; /* 设置 SPI 的数据帧长度,可选 8/16 位 */
uint32_t CLKPolarity;/* 设置时钟极性 CPOL,可选高/低电平 */
uint32_t CLKPhase; /* 设置时钟相位,可选奇/偶数边沿采样 */
uint32_t NSS; /* 设置 NSS 引脚由 SPI 硬件控制还是软件控制 */
uint32_t BaudRatePrescaler; /* 设置时钟分频因子, fpclk/分频数 =fSCK */
uint32_t FirstBit; /* 设置 MSB/LSB 先行 */
uint32_t TIMode; /* 指定是否启用 TI 模式 */
uint32_t CRCCalculation; /* 指定是否启用 CRC 计算 */
uint32_t CRCPolynomial; /* 设置 CRC 校验的表达式 */
} SPI_InitTypeDef;
这些结构体成员说明如下,其中括号内的文字是对应参数在 STM32 标准库中定义的宏:
(1) Mode: 本成员设置 SPI 工作在主机模式 (SPI_MODE_MASTER) 或从机模式 (SPI_MODE_SLAVE ),这两个模式的最大区别为 SPI 的 SCK 信号线的时序, SCK 的时序是由通讯中的主机产生的。若被配置为从机模式, STM32 的 SPI 外设将接受外来的 SCK 信号。
(2) Direction:本成员设置 SPI 的通讯方向,可设置为双线全双工 (SPI_DIRECTION_2LINES),双线只接收 (SPI_DIRECTION_2LINES_RXONLY),单线 SPI_DIRECTION_1LINE。
(3) DataSize: 本成员可以选择 SPI 通讯的数据帧大小是为 8 位 (SPI_DATASIZE_8BIT) 还是 16位 (SPI_DATASIZE_16BIT)。
(4) CLKPolarity 和 CLKPhase:这两个成员配置 SPI 的时钟极性 CLKPolarity 和时钟相位CLKPhase ,这两个配置影响到 SPI 的通讯模式,关于 CLKPolarity 和 CLKPhase 的说明参考前面“通讯模式”小节。时钟极性 CLKPolarity 成员,可设置为高电平 (SPI_POLARITY_HIGH)或低电平 (SPI_POLARITY_LOW)。时钟相位 CPHA 则可以设置为 SPI_PHASE_1EDGE(在SCK 的奇数边沿采集数据) 或 SPI_P HASE_2EDGE(在 SCK 的偶数边沿采集数据) 。
(5) NSS: 本成员配置 NSS 引脚的使用模式,可以选择为硬件模式 (SPI_NSS_HARD ) 与软件模式 ( SPI_NSS_SOFT ),在硬件模式中的 SPI 片选信号由 SPI 硬件自动产生,而软件模式则需要我们亲自把相应的 GPIO 端口拉高或置低产生非片选和片选信号。实际中软件模式应用比较多。
(6) BaudRatePrescaler: 本成员设置波特率分频因子,分频后的时钟即为 SPI 的 SCK 信号线的时钟频率。这个成员参数可设置为 fpclk 的 2、 4、 6、 8、 16、 32、 64、 128、 256 分频。
(7) FirstBit: 所有串行的通讯协议都会有 MSB 先行 (高位数据在前) 还是 LSB 先行 (低位数据在前) 的问题,而 STM32 的 SPI 模块可以通过这个结构体成员,对这个特性编程控制。
(8) TIMode :指定是否启用 TI 模式。可选择为使能 SPI_TIMO DE_ENABLE与不是能SPI_TIMODE_DISABLE
(9) CRCCalculation :指定是否启用 CRC 计算
(10) SPI_CRCPolynomial: 这是 SPI 的 CRC 校验中的多项式,若我们使用 CRC 校验时,就使用这
个成员的参数 (多项式),来计算 CRC 的值。
配置完这些结构体成员后,我们要调用 HAL_SPI_Init 函数把这些参数写入到寄存器中,实现 SPI的初始化,然后调用 __HAL_SPI_ENABLE 来使能 SPI 外设。
SPI 初始化代码
时钟使能以及引脚配置代码
void HAL_SPI_MspInit(SPI_HandleTypeDef *hspi)
{
GPIO_InitTypeDef GPIO_InitStruct;
/*##-1- Enable peripherals and GPIO Clocks #################################*/
/* Enable GPIO TX/RX clock */
SPIx_SCK_GPIO_CLK_ENABLE();
SPIx_MISO_GPIO_CLK_ENABLE();
SPIx_MOSI_GPIO_CLK_ENABLE();
SPIx_CS_GPIO_CLK_ENABLE();
/* Enable SPI clock */
SPIx_CLK_ENABLE();
/*##-2- Configure peripheral GPIO ##########################################*/
/* SPI SCK GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_SCK_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_AF_PP;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(SPIx_SCK_GPIO_PORT, &GPIO_InitStruct);
/* SPI MISO GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_MISO_PIN;
HAL_GPIO_Init(SPIx_MISO_GPIO_PORT, &GPIO_InitStruct);
/* SPI MOSI GPIO pin configuration */
GPIO_InitStruct.Pin = SPIx_MOSI_PIN;
HAL_GPIO_Init(SPIx_MOSI_GPIO_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = FLASH_CS_PIN ;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
HAL_GPIO_Init(FLASH_CS_GPIO_PORT, &GPIO_InitStruct);
}
SPI配置代码
void SPI_FLASH_Init(void)
{
SpiHandle.Instance = SPIx;
SpiHandle.Init.BaudRatePrescaler = SPI_BAUDRATEPRESCALER_4;
SpiHandle.Init.Direction = SPI_DIRECTION_2LINES;
SpiHandle.Init.CLKPhase = SPI_PHASE_2EDGE;
SpiHandle.Init.CLKPolarity = SPI_POLARITY_HIGH;
SpiHandle.Init.CRCCalculation = SPI_CRCCALCULATION_DISABLE;
SpiHandle.Init.CRCPolynomial = 7;
SpiHandle.Init.DataSize = SPI_DATASIZE_8BIT;
SpiHandle.Init.FirstBit = SPI_FIRSTBIT_MSB;
SpiHandle.Init.NSS = SPI_NSS_SOFT;
SpiHandle.Init.TIMode = SPI_TIMODE_DISABLE;
SpiHandle.Init.Mode = SPI_MODE_MASTER;
HAL_SPI_Init(&SpiHandle);
__HAL_SPI_ENABLE(&SpiHandle);
}
Flash写使能
/**
* @brief 向FLASH发送 写使能 命令
* @param none
* @retval none
*/
void SPI_FLASH_WriteEnable(void)
{
/* 通讯开始:CS低 */
SPI_FLASH_CS_LOW();
/* 发送写使能命令*/
SPI_FLASH_SendByte(W25X_WriteEnable);
/*通讯结束:CS高 */
SPI_FLASH_CS_HIGH();
}
Flash写等待函数
/**
* @brief 等待WIP(BUSY)标志被置0,即等待到FLASH内部数据写入完毕
* @param none
* @retval none
*/
void SPI_FLASH_WaitForWriteEnd(void)
{
uint8_t FLASH_Status = 0;
/* 选择 FLASH: CS 低 */
SPI_FLASH_CS_LOW();
/* 发送 读状态寄存器 命令 */
SPI_FLASH_SendByte(W25X_ReadStatusReg);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 若FLASH忙碌,则等待 */
do
{
/* 读取FLASH芯片的状态寄存器 */
FLASH_Status = SPI_FLASH_SendByte(Dummy_Byte);
{
if((SPITimeout--) == 0)
{
SPI_TIMEOUT_UserCallback(4);
return;
}
}
}
while ((FLASH_Status & WIP_Flag) == SET); /* 正在写入标志 */
/* 停止信号 FLASH: CS 高 */
SPI_FLASH_CS_HIGH();
}
SPI交换一个字节代码
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_TXE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
WRITE_REG(SpiHandle.Instance->DR, byte);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待接收缓冲区非空,RXNE事件 */
while (__HAL_SPI_GET_FLAG( &SpiHandle, SPI_FLAG_RXNE ) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器,获取接收缓冲区数据 */
return READ_REG(SpiHandle.Instance->DR);
}
Flash扇区擦除函数
/**
* @brief 擦除FLASH扇区
* @param SectorAddr:要擦除的扇区地址
* @retval 无
*/
void SPI_FLASH_SectorErase(uint32_t SectorAddr)
{
/* 发送FLASH写使能命令 */
SPI_FLASH_WriteEnable();
SPI_FLASH_WaitForWriteEnd();
/* 擦除扇区 */
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送扇区擦除指令*/
SPI_FLASH_SendByte(W25X_SectorErase);
/*发送擦除扇区地址的高位*/
SPI_FLASH_SendByte((SectorAddr & 0xFF0000) >> 16);
/* 发送擦除扇区地址的中位 */
SPI_FLASH_SendByte((SectorAddr & 0xFF00) >> 8);
/* 发送擦除扇区地址的低位 */
SPI_FLASH_SendByte(SectorAddr & 0xFF);
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
/* 等待擦除完毕*/
SPI_FLASH_WaitForWriteEnd();
}
Flash页写入函数
/**
* @brief 对FLASH按页写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度,必须小于等于SPI_FLASH_PerWritePageSize
* @retval 无
*/
void SPI_FLASH_PageWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
/* 发送FLASH写使能命令 */
SPI_FLASH_WriteEnable();
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 写页写指令*/
SPI_FLASH_SendByte(W25X_PageProgram);
/*发送写地址的高位*/
SPI_FLASH_SendByte((WriteAddr & 0xFF0000) >> 16);
/*发送写地址的中位*/
SPI_FLASH_SendByte((WriteAddr & 0xFF00) >> 8);
/*发送写地址的低位*/
SPI_FLASH_SendByte(WriteAddr & 0xFF);
if(NumByteToWrite > SPI_FLASH_PerWritePageSize)
{
NumByteToWrite = SPI_FLASH_PerWritePageSize;
FLASH_ERROR("SPI_FLASH_PageWrite too large!");
}
/* 写入数据*/
while (NumByteToWrite--)
{
/* 发送当前要写入的字节数据 */
SPI_FLASH_SendByte(*pBuffer);
/* 指向下一字节数据 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
/* 等待写入完毕*/
SPI_FLASH_WaitForWriteEnd();
}
SPI缓冲区写入Flash函数
/**
* @brief 对FLASH写入数据,调用本函数写入数据前需要先擦除扇区
* @param pBuffer,要写入数据的指针
* @param WriteAddr,写入地址
* @param NumByteToWrite,写入数据长度
* @retval 无
*/
void SPI_FLASH_BufferWrite(uint8_t* pBuffer, uint32_t WriteAddr, uint16_t NumByteToWrite)
{
uint8_t NumOfPage = 0, NumOfSingle = 0, Addr = 0, count = 0, temp = 0;
/*mod运算求余,若writeAddr是SPI_FLASH_PageSize整数倍,运算结果Addr值为0*/
Addr = WriteAddr % SPI_FLASH_PageSize;
/*差count个数据值,刚好可以对齐到页地址*/
count = SPI_FLASH_PageSize - Addr;
/*计算出要写多少整数页*/
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
/*mod运算求余,计算出剩余不满一页的字节数*/
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
/* Addr=0,则WriteAddr 刚好按页对齐 aligned */
if (Addr == 0)
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*先把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
/* 若地址与 SPI_FLASH_PageSize 不对齐 */
else
{
/* NumByteToWrite < SPI_FLASH_PageSize */
if (NumOfPage == 0)
{
/*当前页剩余的count个位置比NumOfSingle小,写不完*/
if (NumOfSingle > count)
{
temp = NumOfSingle - count;
/*先写满当前页*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*再写剩余的数据*/
SPI_FLASH_PageWrite(pBuffer, WriteAddr, temp);
}
else /*当前页剩余的count个位置能写完NumOfSingle个数据*/
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumByteToWrite);
}
}
else /* NumByteToWrite > SPI_FLASH_PageSize */
{
/*地址不对齐多出的count分开处理,不加入这个运算*/
NumByteToWrite -= count;
NumOfPage = NumByteToWrite / SPI_FLASH_PageSize;
NumOfSingle = NumByteToWrite % SPI_FLASH_PageSize;
SPI_FLASH_PageWrite(pBuffer, WriteAddr, count);
WriteAddr += count;
pBuffer += count;
/*把整数页都写了*/
while (NumOfPage--)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, SPI_FLASH_PageSize);
WriteAddr += SPI_FLASH_PageSize;
pBuffer += SPI_FLASH_PageSize;
}
/*若有多余的不满一页的数据,把它写完*/
if (NumOfSingle != 0)
{
SPI_FLASH_PageWrite(pBuffer, WriteAddr, NumOfSingle);
}
}
}
}
SPI缓冲区读Flash函数
/**
* @brief 读取FLASH数据
* @param pBuffer,存储读出数据的指针
* @param ReadAddr,读取地址
* @param NumByteToRead,读取数据长度
* @retval 无
*/
void SPI_FLASH_BufferRead(uint8_t* pBuffer, uint32_t ReadAddr, uint16_t NumByteToRead)
{
/* 选择FLASH: CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送 读 指令 */
SPI_FLASH_SendByte(W25X_ReadData);
/* 发送 读 地址高位 */
SPI_FLASH_SendByte((ReadAddr & 0xFF0000) >> 16);
/* 发送 读 地址中位 */
SPI_FLASH_SendByte((ReadAddr& 0xFF00) >> 8);
/* 发送 读 地址低位 */
SPI_FLASH_SendByte(ReadAddr & 0xFF);
/* 读取数据 */
while (NumByteToRead--)
{
/* 读取一个字节*/
*pBuffer = SPI_FLASH_SendByte(Dummy_Byte);
/* 指向下一个字节缓冲区 */
pBuffer++;
}
/* 停止信号 FLASH: CS 高电平 */
SPI_FLASH_CS_HIGH();
}