浅谈高阶智能驾驶-NOA领航辅助的技术与发展

附赠自动驾驶学习资料和量产经验:链接
2019年在国内首次试驾特斯拉NOA领航辅助驾驶的时候,当时兴奋的觉得未来已来;2020年在试驾蔚来NOP领航辅助驾驶的时候,顿时不敢小看国内新势力了;现在如果哪家电动车不提供领航辅助功能都不好意思提自己是智能电动车,哪家技术供应商和从业人员不搭上这项配置都不好意思说自己是做智能驾驶的。另外不少智驾科技公司也希望搭上领航辅助这个快车走向资本的圣殿。

那么领航辅助为什么在技术、人才资本角度都那么火?领航辅助到底是什么功能?他需要什么样的软硬件?它的未来发展会是什么样的?
本文将试着从技术和产业的角度去看“领航辅助”,希望能给大家一些信息和启发,本文内容将分以下四个部分:
-
Why - 为什么领航辅助热门?
-
What -什么是领航辅助?
-
How - 领航辅助需要什么样的硬件和软件?
-
Where - 领航辅助的发展与展望?
领航辅助-智能驾驶的前哨
领航辅助,这个中文名字一般人很少人听到,但是特斯拉的NOA, 蔚来汽车的NOP、小鹏的NGP、长城毫末的NOH、以及极狐的NCA、广汽埃安的NDA,大家都被各家宣传的耳熟能详了。如果不是去仔细研究领航辅助,这些名字大家肯定都分不清楚。不知大家有没有发现?他们的首字母都是N,N都代表Navigation 也就是导航领航的意思,所以这些车企宣传的这些字母功能统称为领航辅助,也有人叫导航辅助。

它是当前智能驾驶配置功能的热门前哨。大家可以看到:各家汽车媒体都去测评这项功能的体验和性能,用来评判各家汽车产品的智能驾驶的技术。同时领航辅助也是当前消费者对于智能驾驶科技感最直观的一项配置,汽车实验室曾经做过一个消费者对于高速领航辅助的问卷调查,调查显示42.24%的受访者表示高速领航辅助是标配,刚需;16.38%表示虽然不了解但是想试一试。

所以从技术科技感,体验感来看,领航辅助功能确实是最能体现智能驾驶综合技术能力的一个指标,同时对客户感知体验来讲,也确实是客户生活场景需要和受益的一项功能。当然最重要的是**领航辅助也是通往高阶智能驾驶的雏形。**假以时日,主机厂在通过当前功能应用迭代有信心,政策法规到位的时候可以直接跨入到L4,所以当前智能驾驶吸引了众多技术人才和资本。

根据中金的预测2021-2025年期间,国内高速领航辅助前装市场规模有望从49.5亿元,提升至474.2亿元,期间CAGR达75.9%,城市领航辅助迅猛发展。另外艾瑞的预测,他把其他高速智能辅助也算上,其实其他功能的合集就可以组成高速领航服务,他的2025年预测规模和中金预测差不多,所以多方预测看好其市场规模巨大。

另一方面,**中国智驾技术供应链基本上已经非常完备。**在领航辅助驾驶中高精地图如高德,百度,四维图新,华为都是国内品牌,目前基于AI芯片的智驾域控制器和软件算法的国内供应商多达20家,竞争非常激烈,嗷嗷准备寻找上车机会。
所以领航辅助,天时地利人和成了中国智能驾驶的竞争前哨。
什么是领航辅助
讲了那么多领航辅助的重要性,那么到底领航辅助是项什么功能呢?字面理解“领航”就是需要带路,一般的车辆都配普通的GPS地图用来导航,带有这类功能的车辆一般都配备了高精地图,也就是由高精地图领航辅助驾驶,这也就是它为什么叫领航了,此项功能是特斯拉率先发起的,另外特斯拉不用高精地图而是用ADAS地图(比普通GPS地图信息更多例如包含车道,弯曲率等高级属性)来实现此项功能的,国内厂商都是配备高精地图进行领航辅助,另外目前此项功能从技术角度来看还是属于L2, 所以依然是辅助驾驶功能,所以就叫领航辅助。
领航辅助的概念于2018年特斯拉首先创新上市,国内蔚来2020年率先跟进,小鹏,理想,智己,广汽埃安,哪吒等等一众跟进,目前各家传统品牌都在研发整合之中。
领航辅助的功能总结是:乘客导航开启功能开始后,一般在高精地图或者ADAS地图覆盖区域,它可以让车辆在车道保持居中行驶,根据导航设定线路,实际道路限速,车流状况调节车辆速度,甚至变道辅助驾驶到达目的地。根据它的使用场景可以分为:
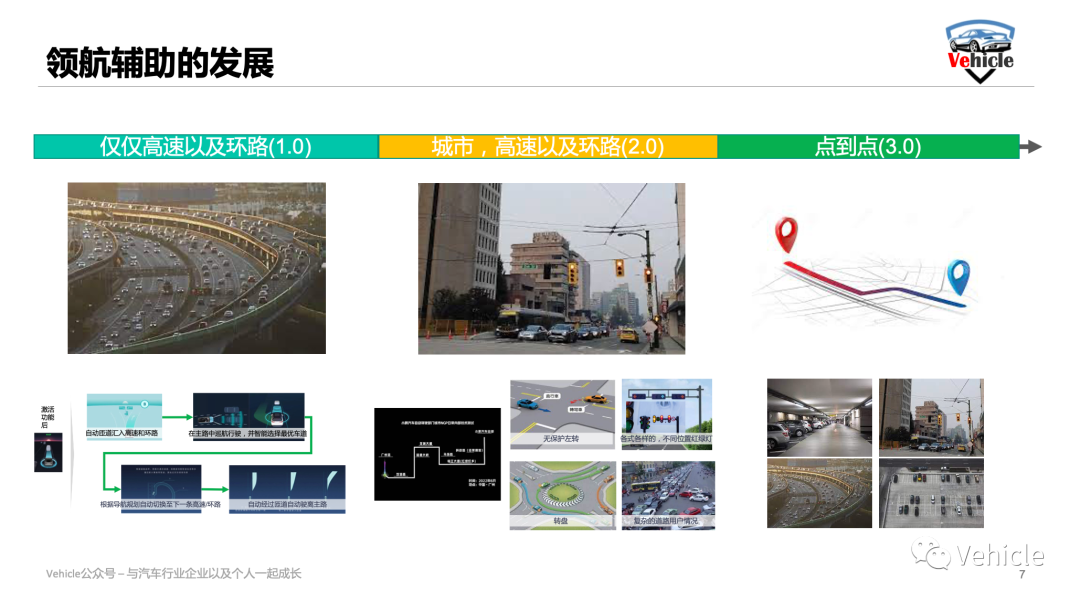
1.0 环路和高速封闭道路的领航辅助,当前各家推出的领航辅助主要就是这个,他可以实现在半封闭道路无红绿灯的高架或者高速领航辅助驾驶,进出匝道,多条环路或者高速道路之间切换,当然目前各家进出匝道或者道路之间切换性能稍有差异。

2.0 城市道路的领航辅助,目前以小鹏,极狐,长城为先锋的企业计划今年下半年将领航辅助推进到城市道路,蔚来以及理想等都在2023年左右计划推出。
城市领航辅助比高速以及环路,情况复杂很多,首先是交通环境复杂,有乘用车,小车,货车也有自行车,电瓶车,还有各种井盖路面破碎,甚至还有掉落物体等等,有大有小,有静止有运动的,这些都给车辆视觉感知系统带来挑战,当然还有红绿灯,红绿灯的不同的位置,不同光线下红绿灯的表现等都是挑战。

其次是,道路种类繁多,有多种实线虚线,也有各种不带线的交汇口,还有一分二,甚至一分三的路口,还有不少环岛,这些都给结合其他道路车辆情况下的路径规划增加了难度。
最后,频繁的加速减速给车辆的运动安全以及舒适控制带来挑战。
而且当前城市领航的体验度还严重依赖城市高精地图,城市高精地图的覆盖率目前不高,即使是同一城市内,比如由于政治安全考虑,北京五环内,上海内环都没有高精地图,所以我个人觉得今年体验不会太好,如果消费者没有严格监控车辆,这个出现的事故会很多。
当然城市领航辅助如果企业要偷懒那么可以简单做,就是以前德企发明的TJA,跟着车流跑,不变道,城市领航跟着高精地图跑就行了,所以城市领航功能嘘头容易喊,但是真正体验可能会千差万别,真正考验各家功夫的时候了,我们下半年拭目以待。
领航辅助需要什么样的硬件和软件
领航辅助需要什么样的软件和硬件呢?其实我之前文章《智能汽车要用多少个摄像头?分别干啥?什么原理?》介绍的L2++硬件都可以实现领航辅助驾驶这个功能。
但是领航辅助根据其使用场景发展步骤不同,其基本的硬件和软件可以不同。我将领航辅助分的三个阶段来讲:
-
领航辅助1.0 - 环路以及高速半封闭场景。
-
领航辅助2.0 - 城市复杂道路 。
-
领航辅助3.0 - 点对点领航场景。

领航辅助1.0的硬件基本感知系统结构可以简单使用5R1V - 5个毫米波雷达,其中1个长距雷达用于探测前方实现纵向运动,加减速探测,4个短距雷达用于横行运动,变道探测横行车辆障碍物等;最少一个前视摄像头用来感知道路线以及识别道路上物体等;一个高精地图模块;一套高精定位包括GNSS 以及IMU;当然必不可少的处理器用来处理图像AI以及雷达感知。

以上领航辅助1.0的硬件基本结构,有毫米波雷达的环绕探测可以在封闭道路实现纵向和横向运动,配合高精地图的领航,前视摄像头和感知定位可以实现在车道内行驶,同时摄像头也负责物体识别,摄像头200w像素就可以。对于芯片算力,抛开特斯拉的特殊情况,其他国内品牌由于采用高精地图,所以他们其实对于AI处理器的TOPS要求不高,毕竟前视觉摄像头的处理基本上为车道线识别和简单的物体识别,所以可以看到TOPS 10 以内都足够。典型1.0的代表为蔚来最初上领航辅助的ES8,理想one以及魏派摩卡。
但是伴随着城市领航辅助的开始,以及记忆泊车等的融入,以上硬件结构就显得不够用了,所以领航辅助2.0的硬件迅速拓展升级,同时这个时候各个主机厂更愿意让硬件先行后期功能通过OTA方式进行释放。
所以到领航辅助2.0,高精地图和高精定位IMU依然是标配,但这个时候摄像头更加重要了,如我之前文章《视觉为王-小鹏以及特斯拉的自动驾驶方案》讲到摄像头呈现360围绕的感知布局来对环境的感知。另外一点是激光雷达开始上车,他的作用我在文章《智能驾驶要用多少个激光雷达?分别放在哪里?什么作用?》中分享了不少,应对静态物体,光线干扰等非常有效。所以随着传感器数量的增加特别是摄像头数量以及像素的增加例如800万像素,那么对于智驾系统的处理器TOPS越来越高,基本都是几百TOPS,高的超过1000TOPS。

总结领航辅助2.0硬件,主要是增加覆盖360度视觉感知,高像素800w摄像头,以及激光雷达,和超过几百TOPS的处理单元。另外2.0时代的硬件开始集成行车和泊车功能,也就是大家常常听到的行泊一体。当然这些高达1000多TOPS的处理器应对当前的功能应该是有余,但各家都在走软件定义汽车的方向,预埋超前的硬件以让未来有更多通过OTA拓展功能的空间。典型代表就是蔚来ET7,理想L9《理想L9的智能座舱,驾驶技术以及供应链》,极狐华为版,小鹏G9等。
至于软件算法方面,硬件1.0时代主要是强依赖高精地图的方式,所有算法都简单围绕前视摄像头进行车道识别,物体识别,而此类算法已经相对成熟而且都有一定的基础数据喂养,基本上不需要应用方进行过多的训练,然后以雷达为冗余的方案实施环路和高速等封闭道路的领航辅助。
但是到了2.0硬件时代,其实也可以用1.0的摄像头算法和高精地图加上激光雷达和雷达的冗余算法方案,但是肯定不会那么智能,他是被动响应的,例如遇到车与车或者其他交通使用者的negotiation交互的时候。
这个时候视觉摄像头的360度环绕下的BEV(鸟瞰图)算法就给了智能驾驶太多想象空间了,在典型的自动驾驶算法堆栈中,行为预测和规划通常在这种自上而下的视图(或鸟瞰图,BEV)中完成,自动驾驶汽车所需的大部分信息可以是方便地用 BEV 表示,这样就可以根据实时交通情况预测和规划路径,此类算法在国内应用还在摸索中,算法训练还需巨大数据。
特斯拉的NOA就是采用BEV算法方案和ADAS地图而非昂贵的高精地图,所以这个算法如果成熟了的话,当前800万像素以及配合激光雷达的硬件可以精准实现无高精地图下的领航辅助,这也就是今年大湾区车展上华为余承东说“有车路协同、高精地图协同更好,没有我们也能做好。未来不能过分依赖于高精地图、车路协同,(否则)自动驾驶和智能驾驶的能力就上不去。”背后的含义。
至于领航辅助3.0呢,其实2.0时代的不少新势力已经都把硬件配置堆上去了,只等软件迭代成熟发布。
领航辅助的发展与展望
领航辅助在国内发展迅猛,领航辅助开始于2018-2020年,首先为半封闭场景相对简单的环路,高速;接下来是2022年城市领航辅助开启元年,基本上未来两三年的时间会有大量产品跟进;再接下来的发展会是点对点领航辅助,其实现在的“行泊一体”硬件概念就是这项功能的萌芽,预计两年左右也就是2024年左右会落地点对点领航辅助。
当前在售车辆的高速领航辅助的瓶颈,主要有,非常强依赖高精地图,由于维修或者改道的环路以及高速道路缩小,领航辅助车辆会视而不见以高精地图为准,这很容易引发事故。
而城市领航功能,目前仅仅小鹏和极狐华为非常少量的工程测试版视频放出,但可以肯定的是,依然会非常强依赖高精地图,那么根据城区高精地图覆盖情况,刚开始体验不会太好,另外城区道路的无保护左转,右转甚至各类转盘,三岔口都会是难题,目前只能等各家出来拭目以待,但可以肯定是软件的迭代可以给这些问题带来不断的优化。
点到点的领航辅助会是这项领航功能的终点,它是泊出车位,城市领航,高速领航,泊入车位的功能集合。所以这也是为什么当前大家都很热门的提“行泊一体”。因为正是需要行车泊车这些功能都有,才能走向点到点的领航辅助。要实现点对点领航辅助目前主要依赖以下技术点:
-
行车:城市,环路,高速高精地图覆盖情况,感知分类识别算法,BEV算法
-
泊车:停车场高精地图覆盖情况,SLAM即时定位和构图
难点,行车有无高精地图,如果没有高精地图情况下BEV算法是否能够稳健覆盖。泊车的时候停车场是否有高精地图,没有高精地图的情况下,室内SLAM泊车是否能够覆盖,如果是室外停车场,室外SLAM是否有效。
当前小鹏量产的记忆泊车主要是基于室内SLAM构建,室外SLAM由于场地宽阔特征远,阳光差异大都是当前算法难点,目前广汽传祺表示其最新的影酷实现了(由于缺少视频和实际体验,真实性不得而知,有资料或者知道的可以留言分享),另外基于激光雷达上车的车型或许给室外SLAM增加了更多可能和稳健性。
当然对于泊车方面也是比较大的课题,例如停车场地图众包,生态管理都可能不是技术是一个生态构建问题,有机会再写。
最终其实如果点对点领航辅助打通,未来随着各家对技术和算法的不断成熟迭代的信心,加上政策法规的配套,L4还会远么?
参考文章以及图片
-
A Sim2Real Deep Learning Approach for the Transformation of Images from Multiple Vehicle-Mounted Cameras to a Semantically Segmented Image in Bird’s Eye View* - Lennart Reiher1 and Bastian Lampe1 , Lutz Eckstein2
-
Attention Is All You Need - google (特斯拉等一众宣传transformer技术的源头)
-
Monocular BEV Perception with Transformers in Autonomous Driving - Liu Patrick Langechuan Liu(Langechuan Liu小鹏汽车自动驾驶算法类总监)
-
AI+汽车:AI赋能自动驾驶发展,领航辅助功能加速渗透 - 中金(此报告中金引用vehicle不少信息但出处写的是转载我文章的出处)
-
2021中国智能驾驶行业研究报告 - 艾瑞咨询
-
角逐升级:中国速度引领自动驾驶 崭新未来 - 毕马威
-
智能网联汽车高精地图 白皮书 - 中国智能网联汽车产业创新联盟
-
巨头林立,盘点全球15家高精地图耕耘者-导航圈