基本全景拼接
panorama_stitching_rotating_camera.cpp 将第二张图像进行透视变换后与第一张图像拼接
#include <iostream> // 包含了一些用于输入输出的函数
#include <opencv2/core.hpp> // 包含了OpenCV核心库的一些常用类和函数
#include <opencv2/imgproc.hpp> // 包含了图像处理的一些类和函数,如图像直方图、滤波、颜色变换等
#include <opencv2/highgui.hpp> // 包含了GUI绘制函数和一些文件输入输出函数与图片展示函数。
using namespace std; // 使用标准库命名空间
using namespace cv; // 使用OpenCV库命名空间
namespace // 匿名命名空间
{
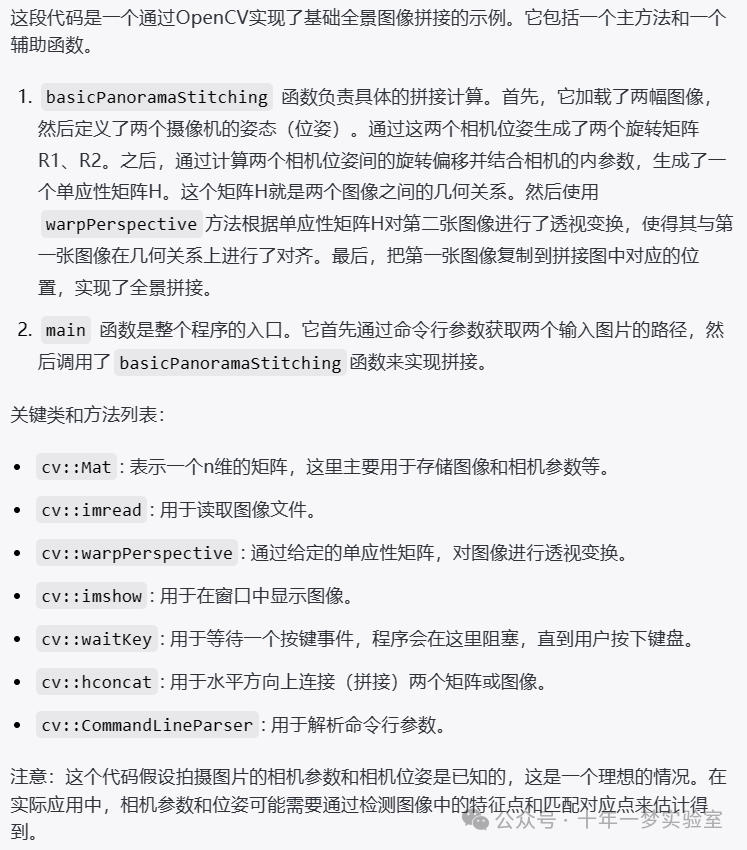
void basicPanoramaStitching(const string &img1Path, const string &img2Path) // 定义一个基本全景图拼接的函数
{
Mat img1 = imread( samples::findFile( img1Path ) ); // 读取第一张图片,并进行文件路径查找
Mat img2 = imread( samples::findFile( img2Path ) ); // 读取第二张图片,并进行文件路径查找
// 定义第一张图片的摄像头位置信息
Mat c1Mo = (Mat_<double>(4,4) << 0.9659258723258972, 0.2588190734386444, 0.0, 1.5529145002365112,
0.08852133899927139, -0.3303661346435547, -0.9396926164627075, -0.10281121730804443,
-0.24321036040782928, 0.9076734185218811, -0.342020183801651, 6.130080699920654,
0, 0, 0, 1);
// 定义第二张图片的摄像头位置信息
Mat c2Mo = (Mat_<double>(4,4) << 0.9659258723258972, -0.2588190734386444, 0.0, -1.5529145002365112,
-0.08852133899927139, -0.3303661346435547, -0.9396926164627075, -0.10281121730804443,
0.24321036040782928, 0.9076734185218811, -0.342020183801651, 6.130080699920654,
0, 0, 0, 1);
// 定义相机的内参信息
Mat cameraMatrix = (Mat_<double>(3,3) << 700.0, 0.0, 320.0,
0.0, 700.0, 240.0,
0, 0, 1);
// 提取旋转矩阵
Mat R1 = c1Mo(Range(0,3), Range(0,3));
Mat R2 = c2Mo(Range(0,3), Range(0,3));
// 计算旋转位移
Mat R_2to1 = R1*R2.t();
// 计算单应性矩阵
Mat H = cameraMatrix * R_2to1 * cameraMatrix.inv();
H /= H.at<double>(2,2);
cout << "H:\n" << H << endl;
// 进行全景图像拼接
Mat img_stitch;
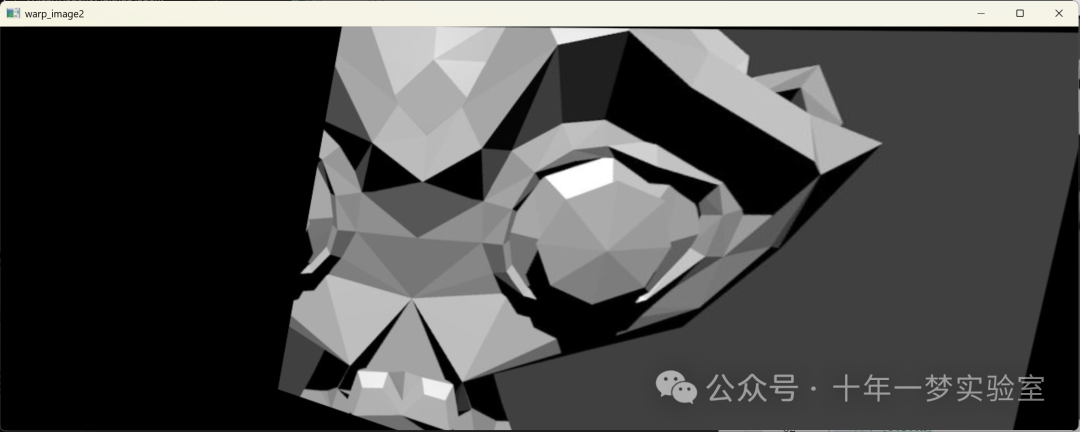
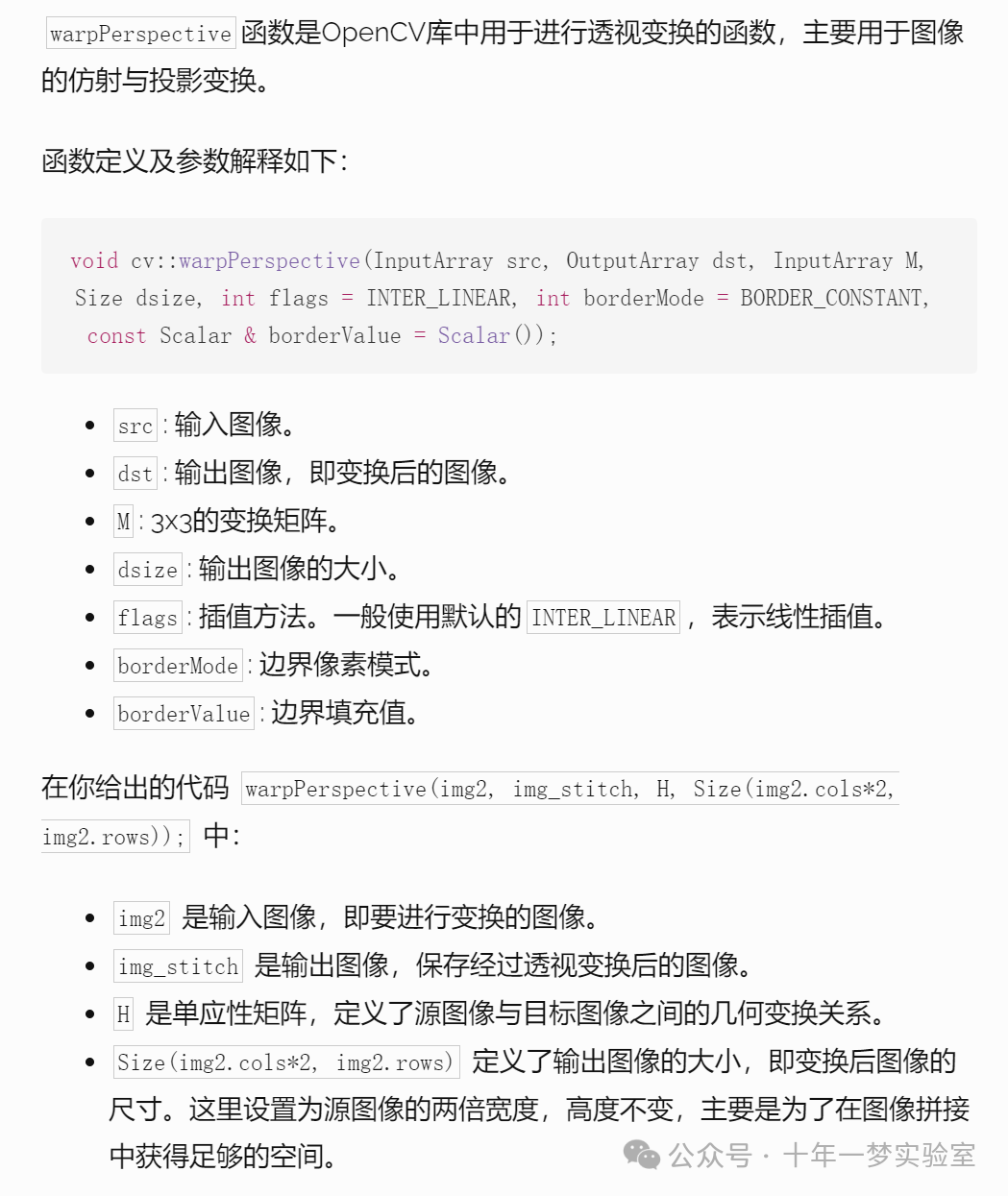
warpPerspective(img2, img_stitch, H, Size(img2.cols*2, img2.rows));
imshow("warp_image2", img_stitch);// 中间输出
Mat half = img_stitch(Rect(0, 0, img1.cols, img1.rows));
img1.copyTo(half);
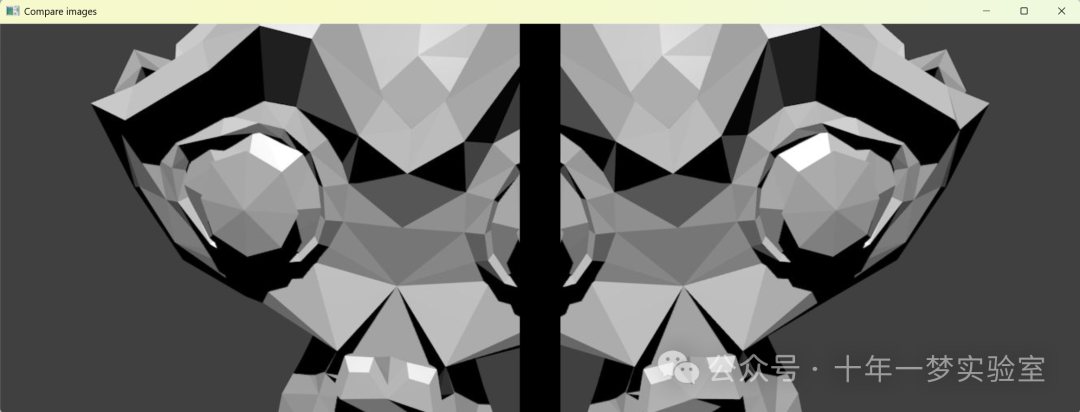
// 显示经过拼接的全景图像和原图对比
Mat img_compare;
Mat img_space = Mat::zeros(Size(50, img1.rows), CV_8UC3);
hconcat(img1, img_space, img_compare);
hconcat(img_compare, img2, img_compare);
imshow("Compare images", img_compare);
imshow("Panorama stitching", img_stitch); // 显示拼接的全景图
waitKey(); // 等待用户响应
}
// 参数描述信息
const char* params
= "{ help h | | print usage }"
"{ image1 | Blender_Suzanne1.jpg | path to the first Blender image }"
"{ image2 | Blender_Suzanne2.jpg | path to the second Blender image }";
}
int main(int argc, char *argv[]) // 主函数,程序从此处开始运行
{
CommandLineParser parser(argc, argv, params); // 命令行参数解析器
if (parser.has("help")) // 如果有输入'help'参数
{
parser.about( "Code for homography tutorial.\n"
"Example 5: basic panorama stitching from a rotating camera.\n" ); // 显示关于该程序的简介
parser.printMessage(); // 打印所有参数的说明
return 0; // 程序正常退出
}
basicPanoramaStitching(parser.get<String>("image1"), parser.get<String>("image2")); // 运行全景图像拼接函数
return 0; // 程序正常退出
}这段代码是使用OpenCV来实现全景图像拼接的一个基础示例,通过计算两张來自同一旋转摄像头拍摄的图像的单应性矩阵,然后将第二张图像进行透视变换后与第一张图像拼接,得到一张全景图。
![[leetcode] 46. 全排列](https://img-blog.csdnimg.cn/direct/a36c1b59f2eb48eebd27dc7ba26116ca.png)