模块分析
在本工程中,使用stm32做主控芯片输出PWM波,TB6112做电源驱动带动5840-31ZY编码器直流减速电机旋转特定角度
有如下模块
TB6112驱动模块
TB6112是性能优于常见L298N的一款电机驱动芯片,体积更小效率更高发热少
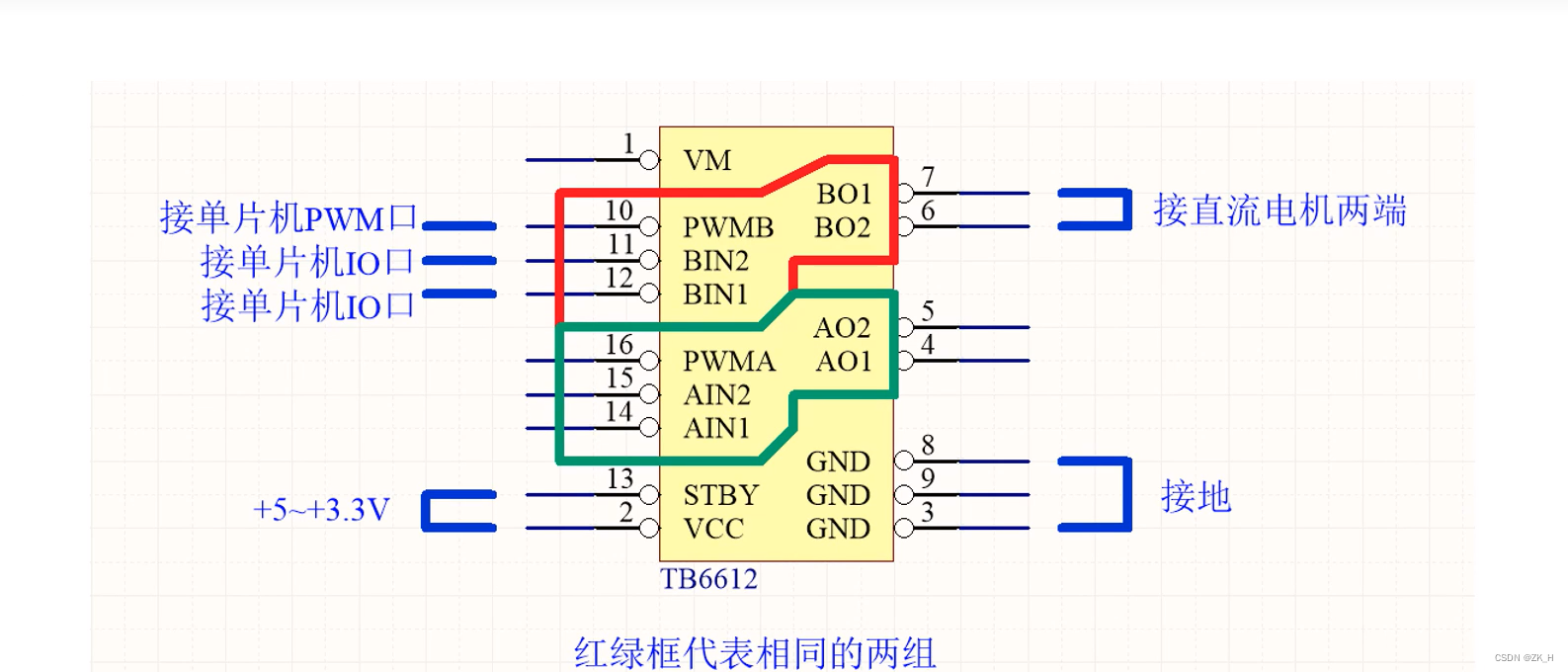
其接线如图,其中通过BIN2,BIN1分别输入高低电平,可以控制BO2,BO1对应输出高低电平,从而实现对直流电机旋转方向的设定
#include "stm32f10x.h" // Device header
void tb6612_init(){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//使能电机正反转控制
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);//使能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);//使能pwm输出口
GPIO_InitTypeDef gpiob12;
gpiob12.GPIO_Mode=GPIO_Mode_Out_PP;
gpiob12.GPIO_Pin=GPIO_Pin_1 | GPIO_Pin_2;
gpiob12.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&gpiob12);//电机正反转引脚
TIM_InternalClockConfig(TIM3);//内部时钟选择
GPIO_InitTypeDef gpioa6;
gpioa6.GPIO_Mode=GPIO_Mode_AF_PP;
gpioa6.GPIO_Pin=GPIO_Pin_6;
gpioa6.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOA,&gpioa6);//使用TIM3,CH1通道——对应输出引脚为PA6
TIM_TimeBaseInitTypeDef tim3_1;
tim3_1.TIM_ClockDivision=TIM_CKD_DIV1;
tim3_1.TIM_CounterMode=TIM_CounterMode_Down;
tim3_1.TIM_Period=1000-1;
tim3_1.TIM_Prescaler=720-1;
tim3_1.TIM_RepetitionCounter=0;
TIM_TimeBaseInit(TIM3,&tim3_1);//使能时钟,时基单元初始化
TIM_OCInitTypeDef tim_ocinitstructure;
TIM_OCStructInit(&tim_ocinitstructure);
tim_ocinitstructure.TIM_OCMode=TIM_OCMode_PWM1;
tim_ocinitstructure.TIM_OCPolarity=TIM_OCPolarity_High;
tim_ocinitstructure.TIM_OutputState=TIM_OutputState_Enable;
tim_ocinitstructure.TIM_Pulse=1000;
TIM_OC1Init(TIM3,&tim_ocinitstructure);//捕获比较模式选择
TIM_Cmd(TIM3,ENABLE);//
}
void z_revolve(){
GPIO_SetBits(GPIOB,GPIO_Pin_1);
GPIO_ResetBits(GPIOB,GPIO_Pin_2);//电机正转
}
void f_revolve(){
GPIO_SetBits(GPIOB,GPIO_Pin_2);
GPIO_ResetBits(GPIOB,GPIO_Pin_1);//电机反转
}
void pwm_duty(int duty){
TIM_SetCompare1(TIM3,duty*10);//设定PWM占空比
}这里提供了对应IO口的使能与输入,并通过电平设定,可以控制电机旋转方向,并且对应PWM占空比也提供了接口进行调节(BIN1接PB1口,BIN2接PB2口,PWM接PA6口)
霍尔编码器模块
对于该款——5840-31ZY编码器,其与电机集成在一起,6个接口,两个连接电机电源(TB6112模块引出),两个连接传感器电源地线,两个连接AB信号(与stm32对应引脚连接,从而利用stm32根据读取AB相值执行相应功能)

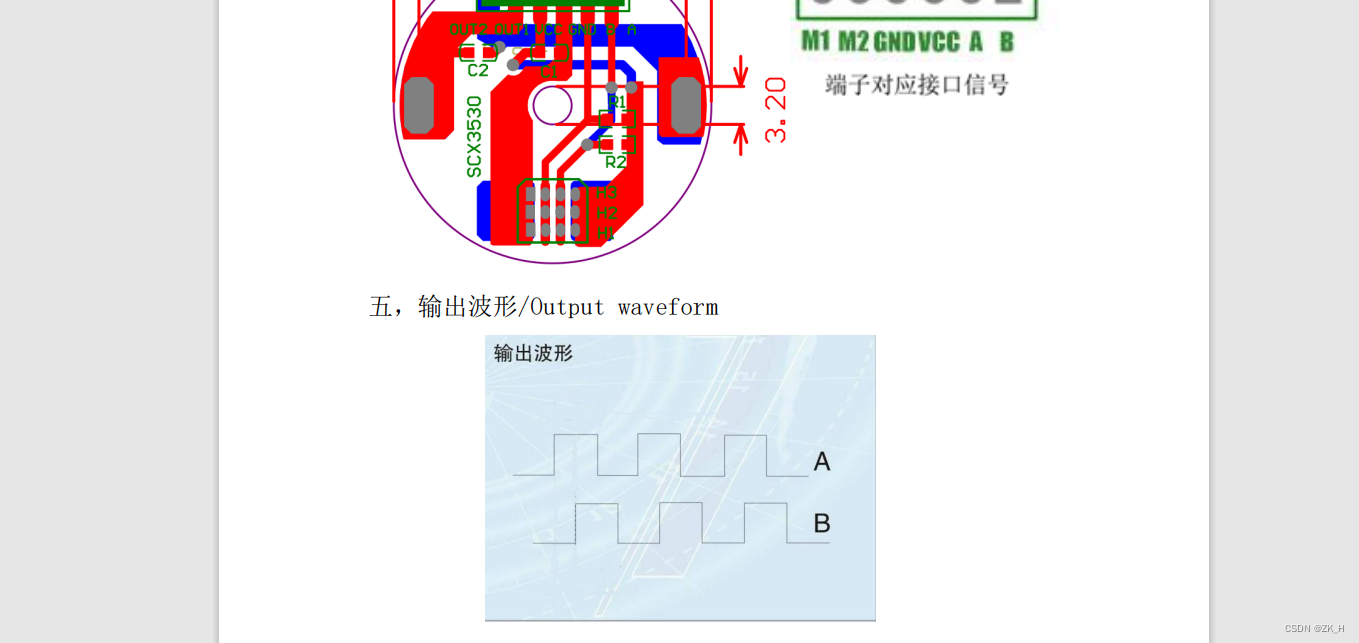
这里我们只关注其AB相对应关系
#include "stm32f10x.h" // Device header
extern int encoder_num;
void encoder_init(void){
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//使能时钟
GPIO_InitTypeDef gpiob3;
gpiob3.GPIO_Mode=GPIO_Mode_IPU;
gpiob3.GPIO_Pin=GPIO_Pin_3;
gpiob3.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&gpiob3);//初始化A相接口
GPIO_InitTypeDef gpiob4;
gpiob4.GPIO_Mode=GPIO_Mode_IPU;
gpiob4.GPIO_Pin=GPIO_Pin_4;
gpiob4.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_Init(GPIOB,&gpiob4);//初始化B相接口
GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,GPIO_PinSource3);
EXTI_InitTypeDef EXTI_INSTRUCTURE;
EXTI_INSTRUCTURE.EXTI_Line=EXTI_Line3;
EXTI_INSTRUCTURE.EXTI_LineCmd=ENABLE;
EXTI_INSTRUCTURE.EXTI_Mode=EXTI_Mode_Interrupt;
EXTI_INSTRUCTURE.EXTI_Trigger=EXTI_Trigger_Falling;
EXTI_Init(&EXTI_INSTRUCTURE);//中断模式选择,默认高电平,下降沿触发
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
NVIC_InitTypeDef NVIC_INITSTRUCTURE;
NVIC_INITSTRUCTURE.NVIC_IRQChannel=EXTI3_IRQn;
NVIC_INITSTRUCTURE.NVIC_IRQChannelCmd=ENABLE;
NVIC_INITSTRUCTURE.NVIC_IRQChannelPreemptionPriority=1;
NVIC_INITSTRUCTURE.NVIC_IRQChannelSubPriority=1;
NVIC_Init(&NVIC_INITSTRUCTURE);//中断优先级分组
}
void EXTI3_IRQHandler(){
if(EXTI_GetITStatus(EXTI_Line3)==SET){
encoder_num++;
EXTI_ClearITPendingBit(EXTI_Line3);
}
}//中断处理函数,每当发生中断,即发生脉冲变化,encoder_num加1
int get_encodernum(){
return encoder_num;//返回encoder_num值
}
在这里,我们读取A相电平变化,并且在A相电平由高到低——下降沿触发时,进入中断,执行中断函数,encoder_num加1,我们读取的值即为当前脉冲发生次数,再与电机旋转一周脉冲次数相比较,即可得到当前旋转角度