这里写目录标题
- 一、任务描述
- 二、任务实施
- 1、WWDG工程文件夹创建
- 2、函数编辑
- (1)主函数编辑
- (2)USART1初始化函数(usart1_init())
- (3)USART数据发送函数( USART1_Send_Data())
- (4)USART数据发送函数( USART1_IRQHandler())
- (5)系统时间初始化函数( SystemTinerInit())
- (6)等待计时函数( WaitTimerOut())
- (7)系统时间定时器中断服务函数( TIM3_IRQHandler())
- (8)获取系统计时时间函数( GetSystemTimer())
- (9)外部中断4初始化函数( EXTIX_Init())
- (10)外部中断4服务函数( EXTI4_IRQHandler())
- (11)窗口看门狗初始化函数(IWDG_Init())
- (12)喂窗口看门狗函数(WWDG_IRQHandler())
- (13)窗口看门狗中断配置函数(WWDG_NVIC_Init())
- (14)喂窗口看门狗函数(WWDG_IRQHandler())
- 3、宏定义
- 定时器宏定义
- 中断宏定义
- 窗口看门狗宏定义
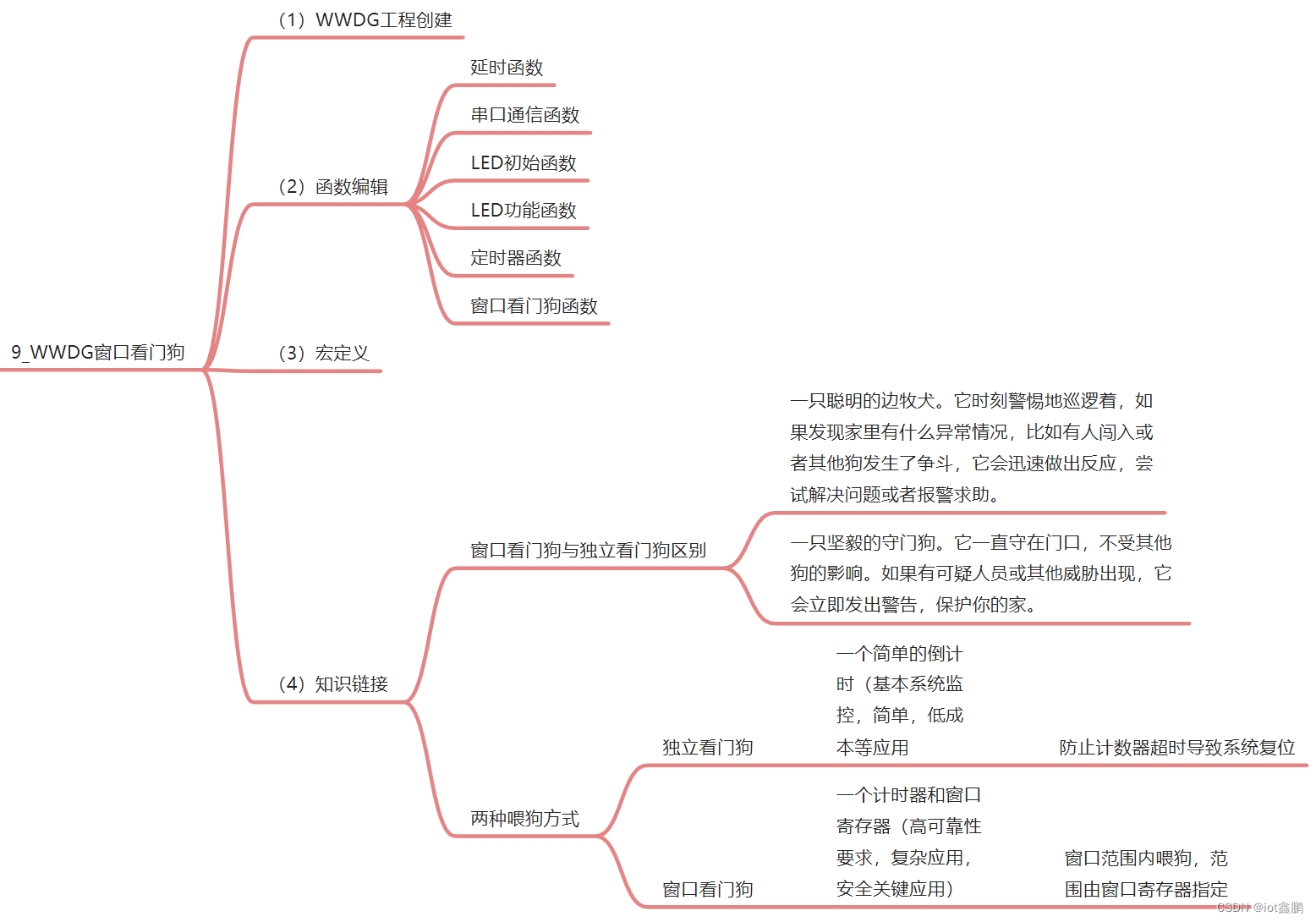
- 4、知识链接
- (1)独立看门狗
- (2)两种看门狗喂狗的区别
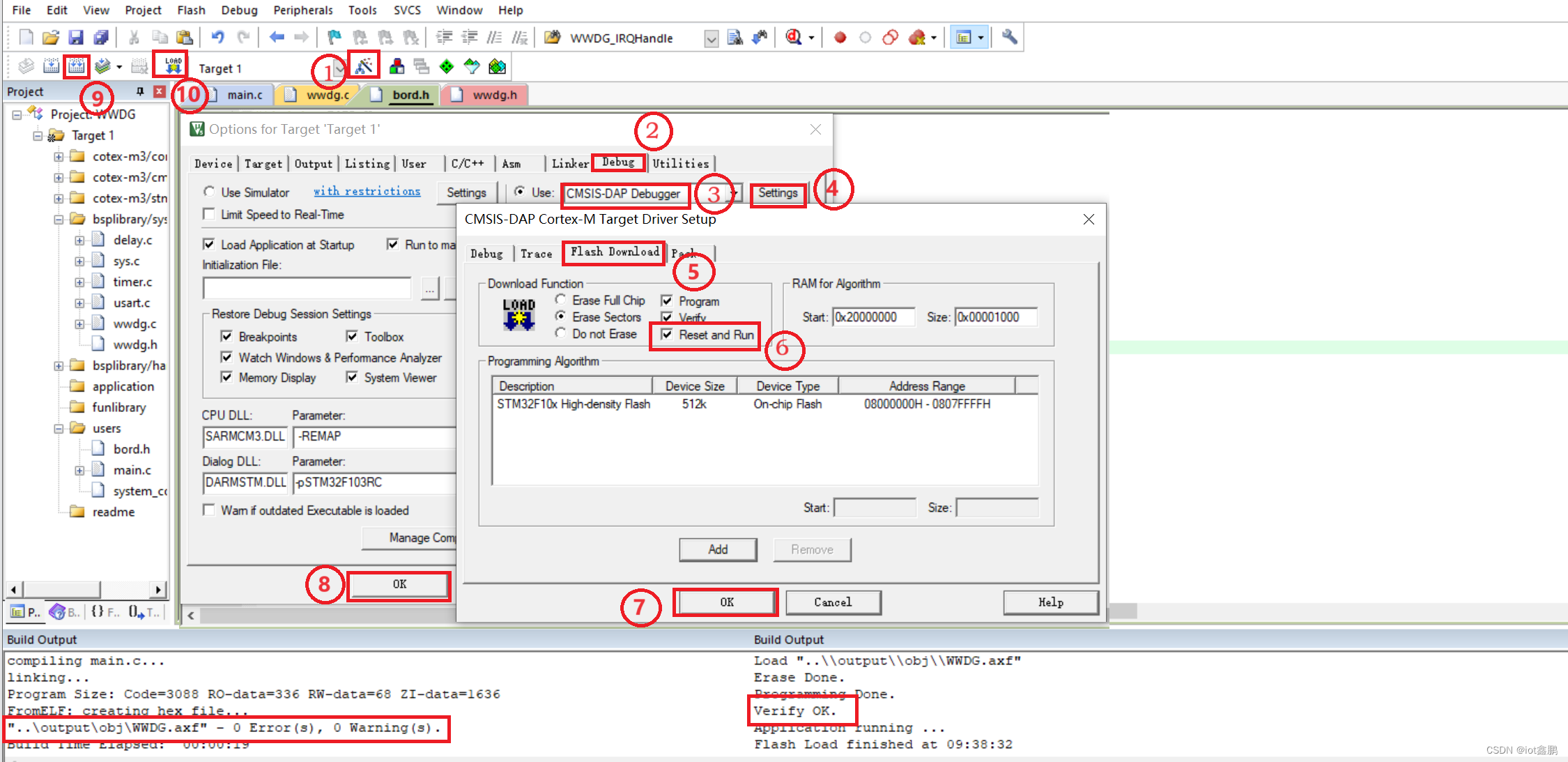
- 5、工程测试
STM32资料包:
百度网盘下载链接:链接:https://pan.baidu.com/s/1mWx9Asaipk-2z9HY17wYXQ?pwd=8888
提取码:8888
一、任务描述
二、任务实施
观察电路图:
TXD(底板) ————————> PA10
RXD(底板) ————————> PA9
D1 (底板) ————————> PA0
D2(底板)————————> PA8
使用USB-AB型数据线,连接15核心板USB口,串口发送接收到的数据。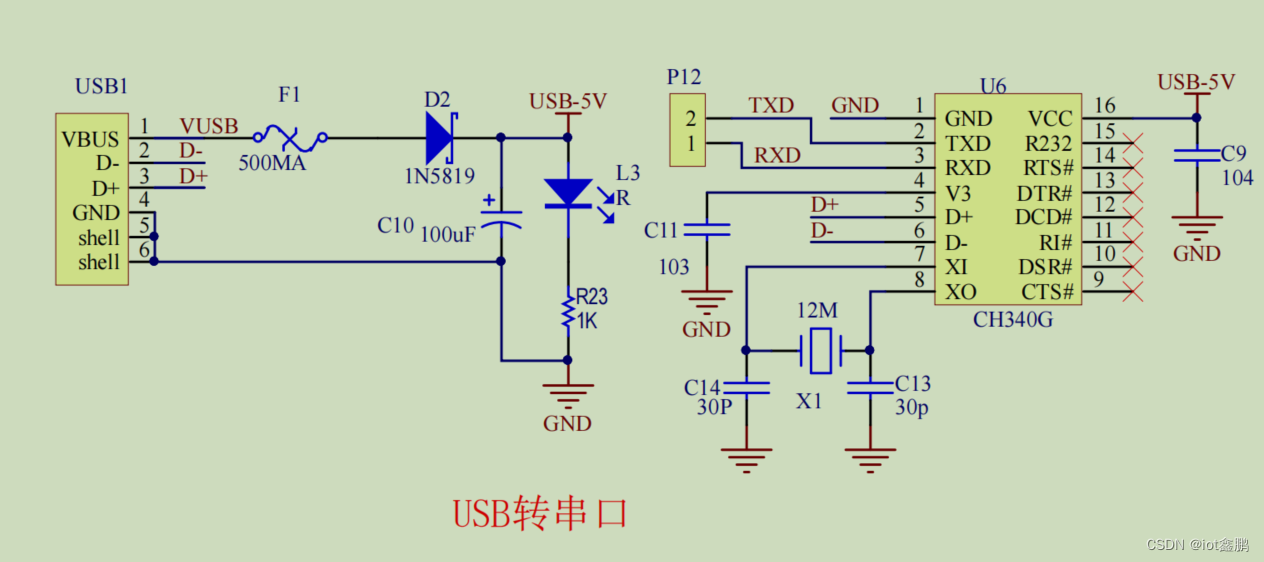
1、WWDG工程文件夹创建
步骤1:复制工程模板“1_Template”重命名为“10_WWDG”。
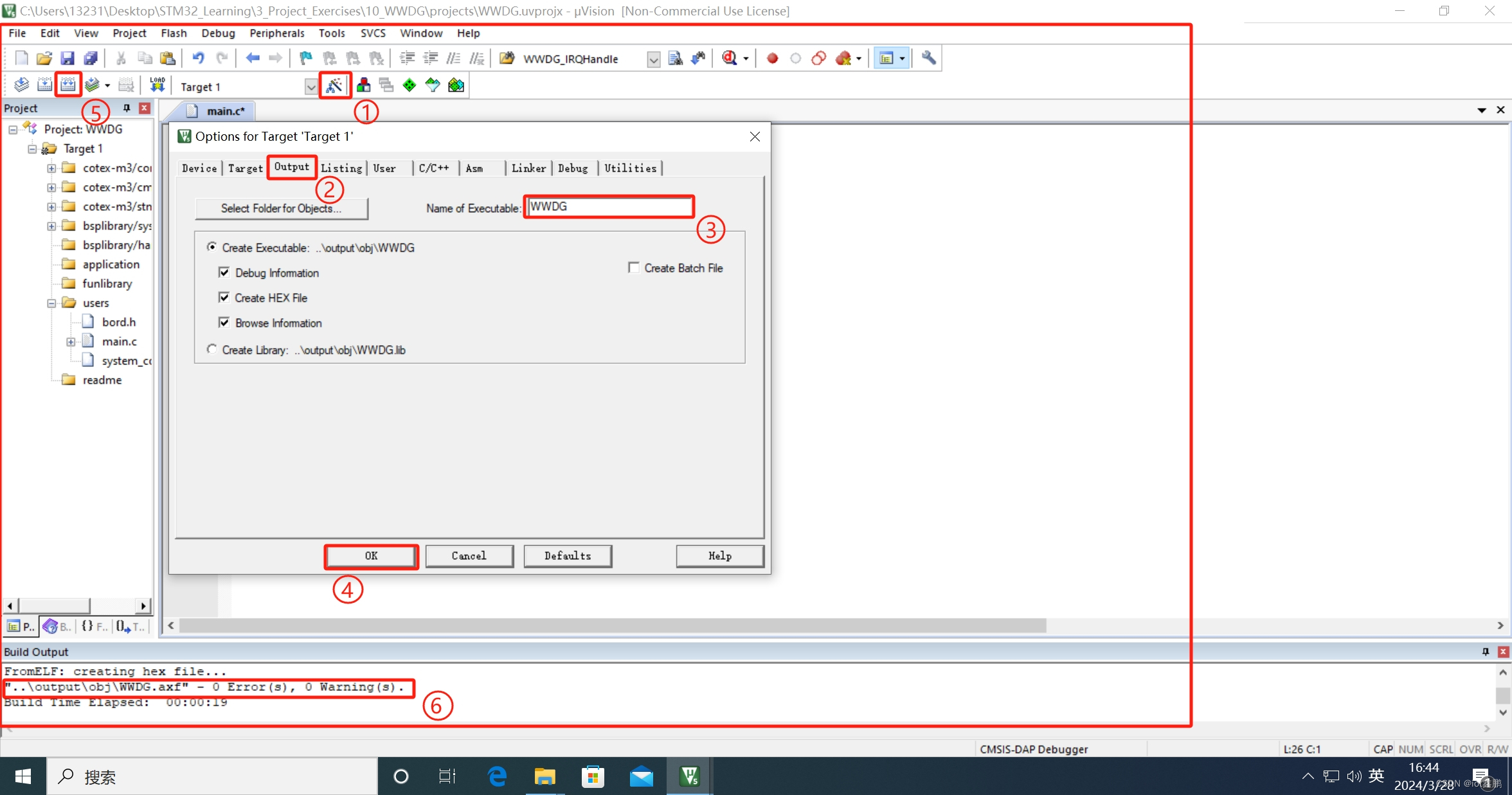
步骤2:修改项目工程名,先删除projects文件夹内除了Template.uvprojx文件外的所有内容并修改为“WWDG.uvprojx”。并删除output/obj和output/lst中的所有文件。

步骤3:运行“WWDG.uvprojx”打开目标选项“Options for Target”中的“Output”输出文件,并修改可执行文件名称为“WWDG”点击“OK”保存设置。最后点击“Rebuild”编译该工程生成Usart文件。
步骤4:复制“2_SingleKey”中的"1_LED"和"SingleKey"文件复制到hardware中。

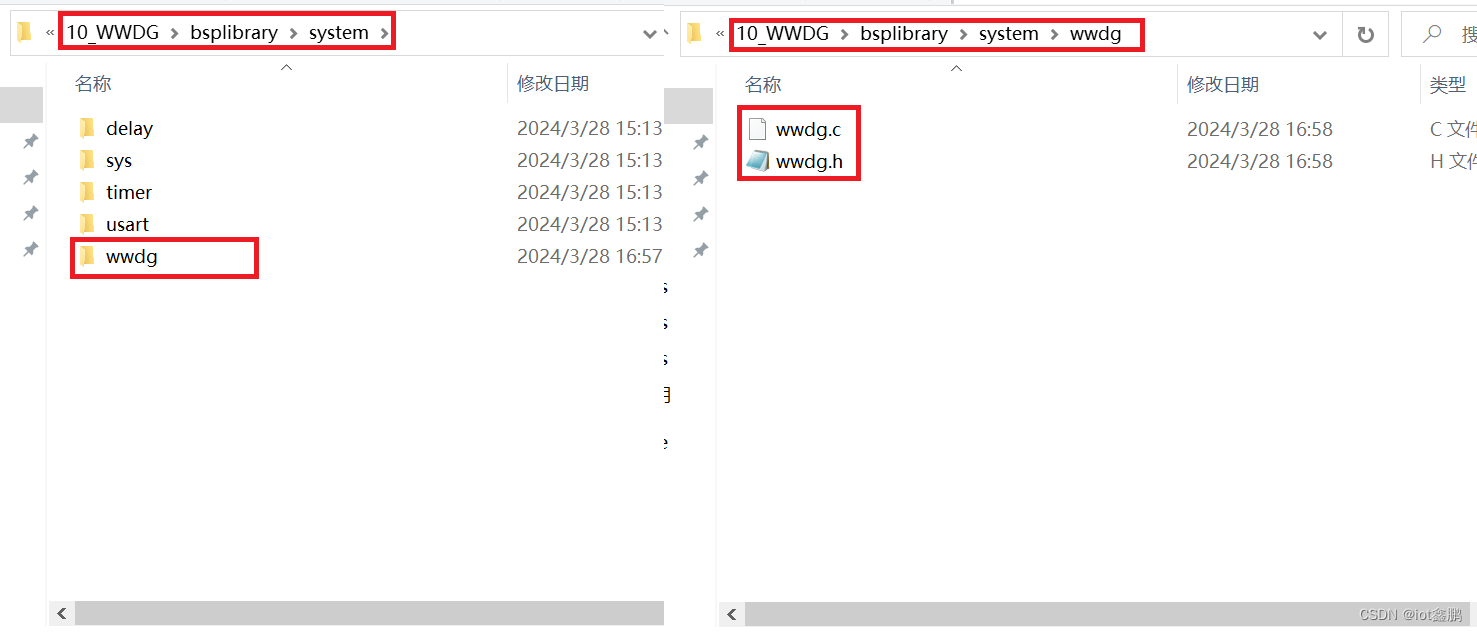
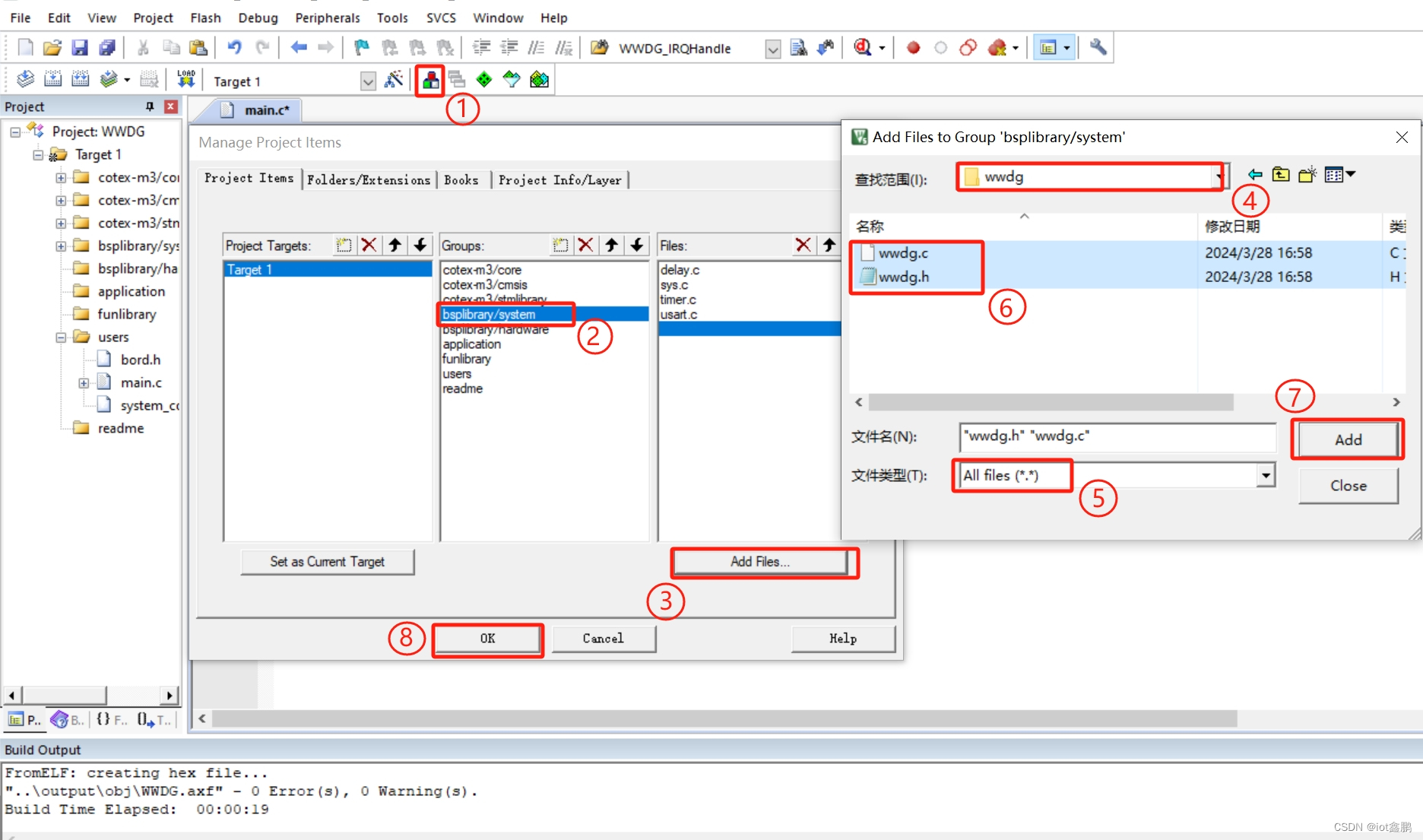
步骤5:在“system”中新建“wwdg”文件夹,并新建“wwdg.c”和“wwdg.h”文件。
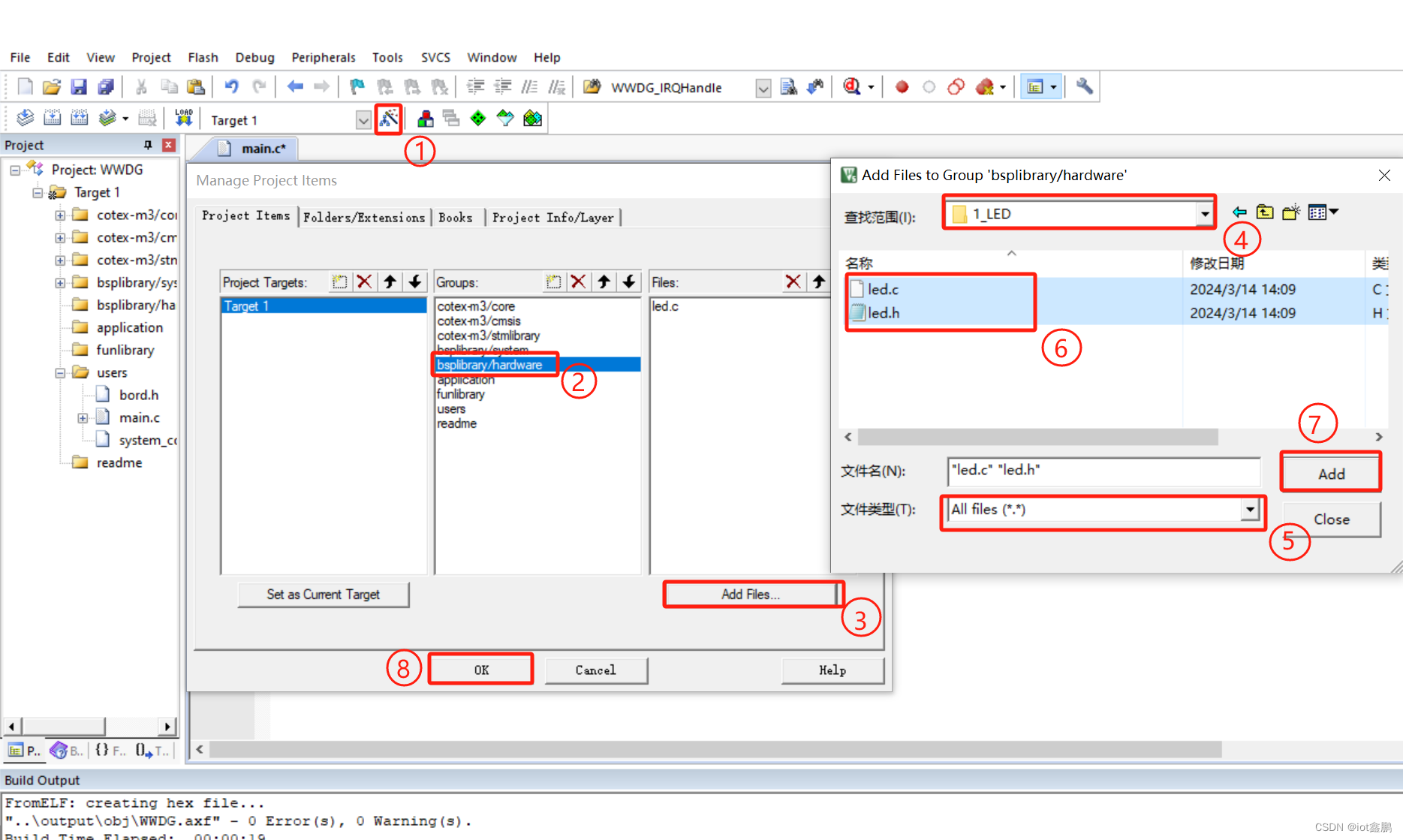
步骤5:工程组文件中添加“led.c”和“led.h”文件。
步骤5:工程组文件中添加“iwdg.c”和“iwdg.h”文件。
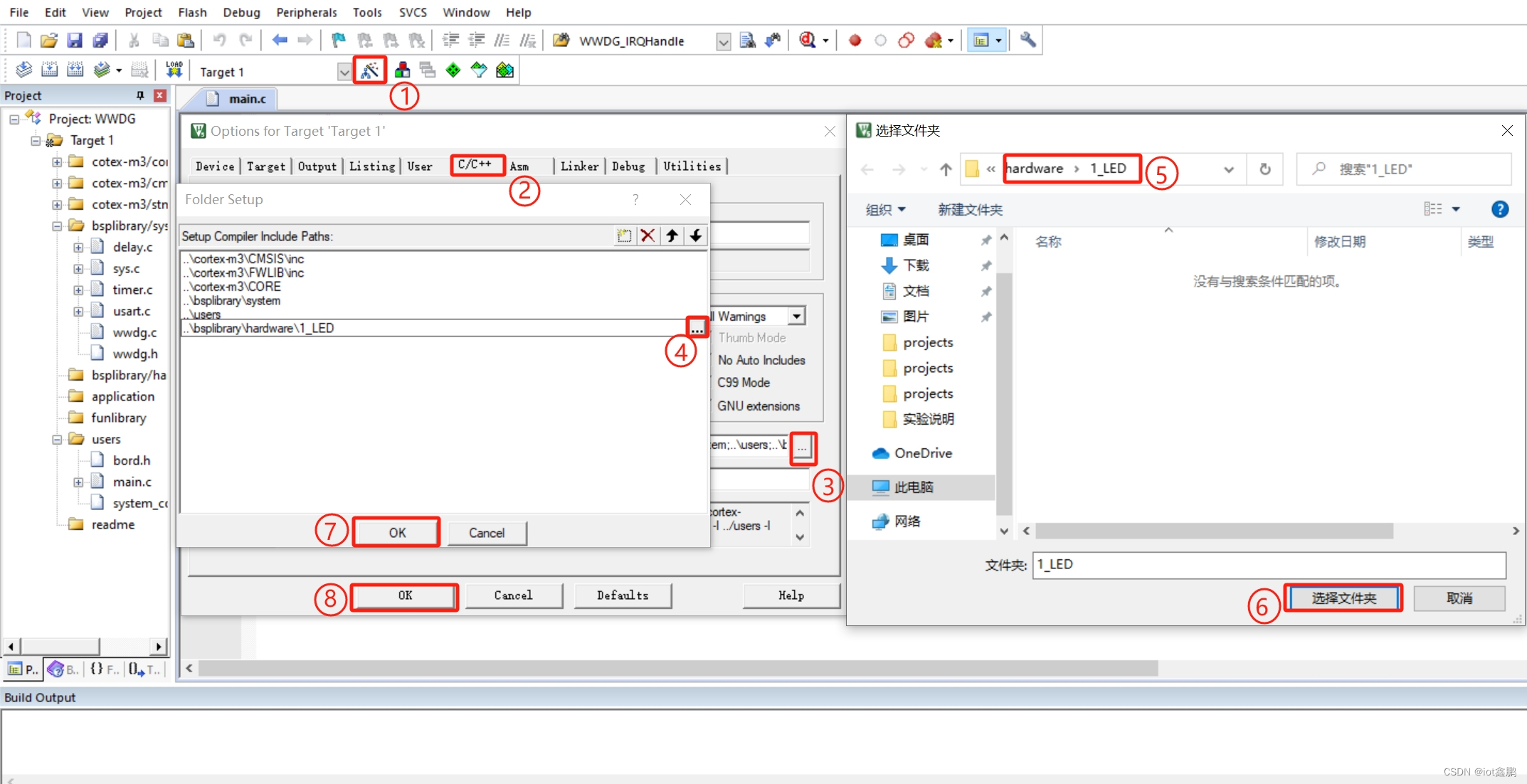
步骤6:目标选项添加添加头文件路径。
2、函数编辑
(1)主函数编辑
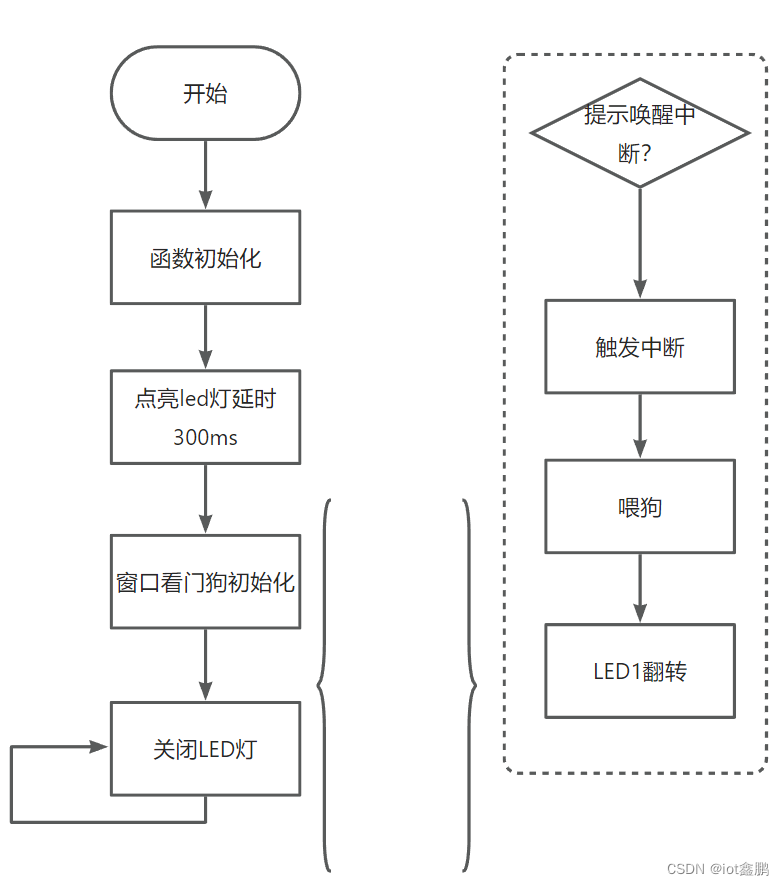
该段代码是一个嵌入式系统的主程序入口,其中包括初始化各种外设(如滴答定时器、USART1、LED等),然后进入一个无限循环,不断交替地控制LED灯的闪烁。。
步骤1:端口初始化准备
//函数初始化,端口准备
delay_init(); //启动滴答定时器
usart1_init(9600); //USART1初始化
LED_Init(); //板载LED初始化
ExpLEDInit(); //开发板LED初始化
SystemTinerInit(1000-1,7200-1); //系统时间初始化 定时100ms
LED = 0;
delay_ms(500); //让人看得到灭
WWDG_Init(0X7F,0X5F,WWDG_Prescaler_8);//计数器值为7f,窗口寄存器为5f,分频数为8
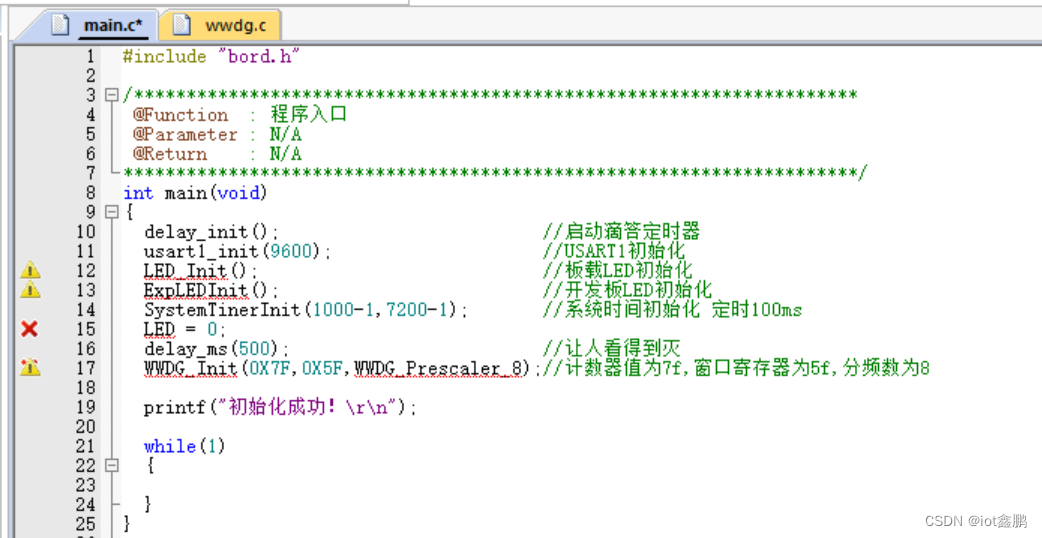
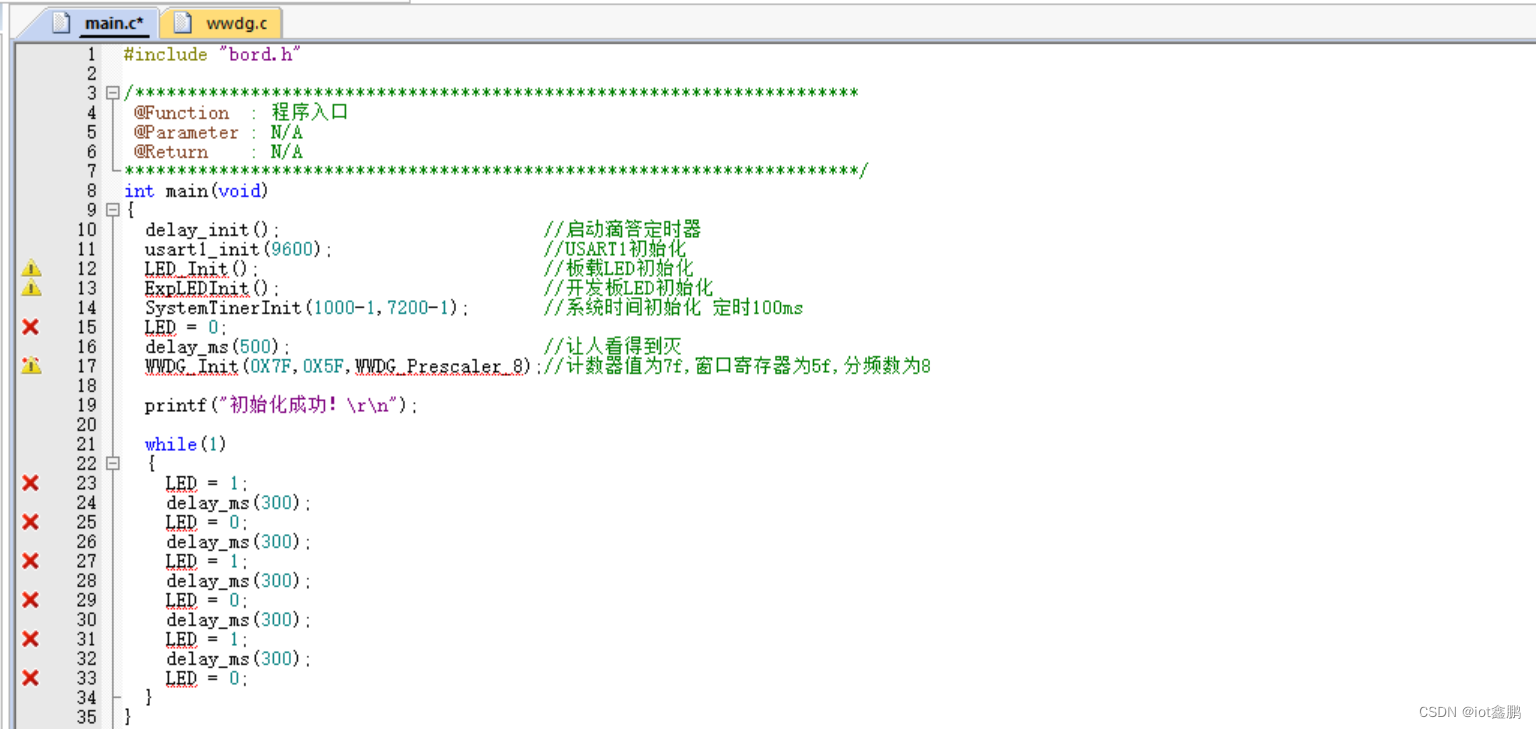
步骤2:实现一个简单的计时器,并在每秒打印一次计时信息。利用LED状态的改变来指示系统正在运行。
printf("初始化成功!\r\n");
while(1)
{
LED = 1;
delay_ms(300);
LED = 0;
delay_ms(300);
LED = 1;
delay_ms(300);
LED = 0;
delay_ms(300);
LED = 1;
delay_ms(300);
LED = 0;
}
(2)USART1初始化函数(usart1_init())
配置了 PA9 为复用推挽输出,用于 USART1 的 TXD,并配置了 PA10 为浮空输入,用于 USART1 的 RXD。并配置了 USART1 的参数,包括波特率、数据位长度、停止位数、校验位、硬件流控制和工作模式。
/*********************************************************************
@Function : USART1初始化
@Parameter : bound : 波特率
@Return : N/A
**********************************************************************/
void usart1_init(uint32_t bound)
{
GPIO_InitTypeDef GPIO_InitStructure; // 定义 GPIO 初始化结构体
USART_InitTypeDef USART_InitStructure; // 定义 USART 初始化结构体
NVIC_InitTypeDef NVIC_InitStructure; // 定义 NVIC 初始化结构体
/* 时钟使能:启用 USART1 和 GPIOA 的时钟 */
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1 | RCC_APB2Periph_GPIOA, ENABLE);
/* 引脚复用配置 */
// 配置 PA9 为复用推挽输出,用于 USART1 的 TXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9; // 设置 GPIO 端口
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; // 设置 GPIO 速度
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; // 设置 GPIO 模式为复用推挽
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化 GPIO
// 配置 PA10 为浮空输入,用于 USART1 的 RXD
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10; // 设置 GPIO 端口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; // 设置 GPIO 模式为浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); // 初始化 GPIO
/* NVIC 中断配置 */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; // 设置中断通道为 USART1
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 3; // 设置抢占优先级为3
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 设置子优先级为3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能中断通道
NVIC_Init(&NVIC_InitStructure); // 初始化 NVIC
/* USART1 配置 */
USART_InitStructure.USART_BaudRate = bound; // 设置波特率
USART_InitStructure.USART_WordLength = USART_WordLength_8b; // 设置数据位长度为8位
USART_InitStructure.USART_StopBits = USART_StopBits_1; // 设置停止位为1位
USART_InitStructure.USART_Parity = USART_Parity_No; // 设置校验位为无校验
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; // 设置硬件流控制为无
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; // 设置工作模式为接收和发送
USART_Init(USART1, &USART_InitStructure); // 初始化 USART1
/*中断配置*/
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE); //开接受中断
USART_ITConfig(USART1,USART_IT_IDLE,ENABLE); //开空闲中断
USART_ITConfig(USART1,USART_IT_TXE,ENABLE); //开发送中断
USART_Cmd(USART1, ENABLE); //启用USART1
USART_DataTypeStr.Usart_Tc_State = SET; //置位发送允许标志
}

(3)USART数据发送函数( USART1_Send_Data())
初始化PD14端口,并为推挽输出。
/*********************************************************************
@Function : USART数据发送函数
@Parameter : Data :要发送的数据缓存.
Lenth :发送长度
@Return : 发送状态 1 :失败 0 :成功
**********************************************************************/
char USART1_Send_Data(char* Data,uint8_t Lenth)
{
uint8_t uNum = 0;
if(USART_DataTypeStr.Usart_Tc_State == 1) //判断发送标志位是否置1
{
USART_DataTypeStr.Usart_Tc_State = 0; //将发送标志位清零,表示数据已经成功放入缓存,等待发送
USART_DataTypeStr.Usart_Tx_Len = Lenth; //获取需要发送的数据的长度
for(uNum = 0;uNum < USART_DataTypeStr.Usart_Tx_Len;uNum ++) //将需要发送的数据放入发送缓存
{
USART_DataTypeStr.Usart_Tx_Buffer[uNum] = Data[uNum];
}
USART_ITConfig(USART1,USART_IT_TXE,ENABLE); //数据放入缓存后打开发送中断,数据自动发送
}
return USART_DataTypeStr.Usart_Tc_State; //返回放数据的状态值,为1表示发送失败,为0表示发送成功了
}

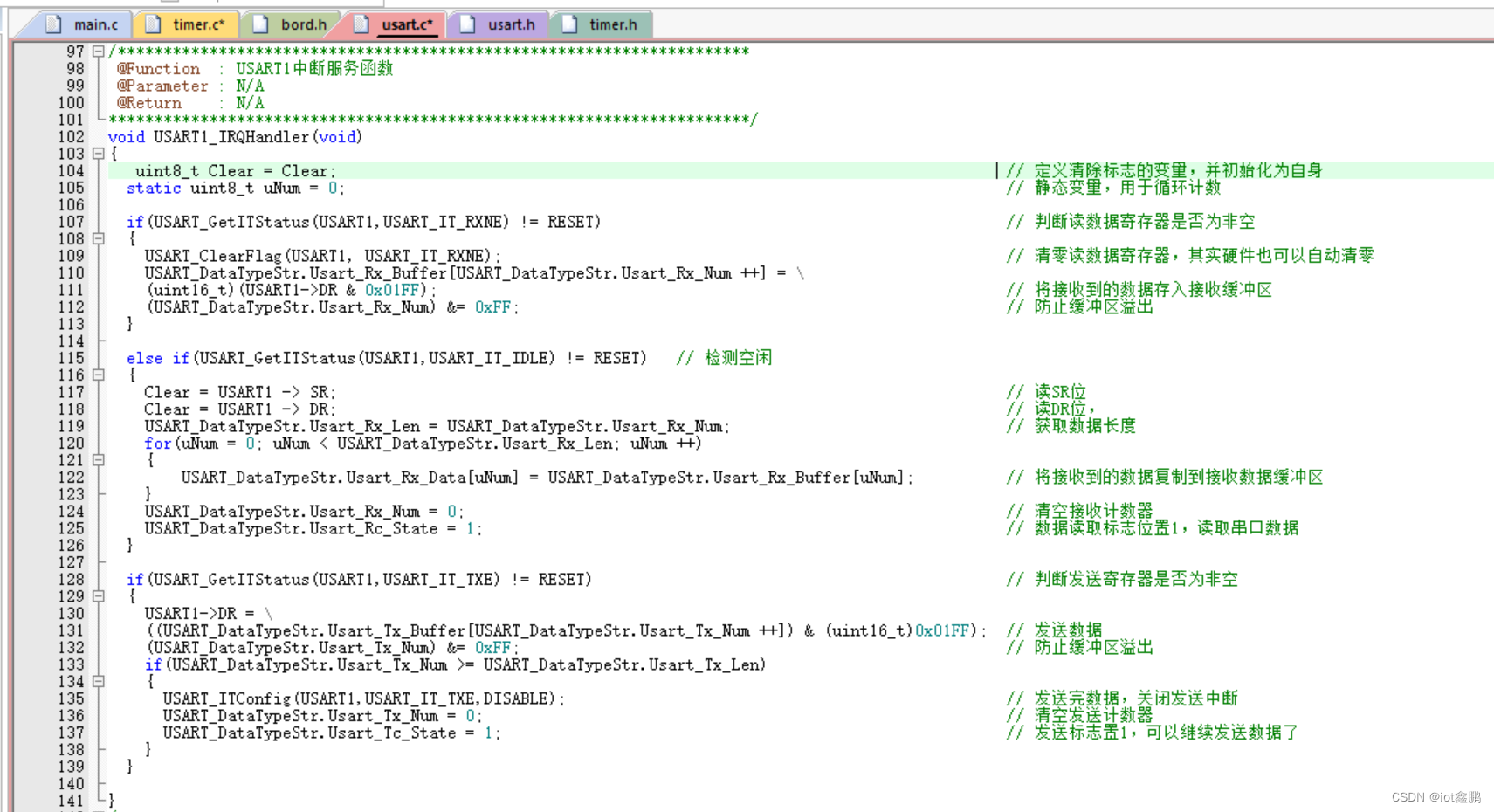
(4)USART数据发送函数( USART1_IRQHandler())
/*********************************************************************
@Function : USART1中断服务函数
@Parameter : N/A
@Return : N/A
**********************************************************************/
void USART1_IRQHandler(void)
{
uint8_t Clear = Clear; // 定义清除标志的变量,并初始化为自身
static uint8_t uNum = 0; // 静态变量,用于循环计数
if(USART_GetITStatus(USART1,USART_IT_RXNE) != RESET) // 判断读数据寄存器是否为非空
{
USART_ClearFlag(USART1, USART_IT_RXNE); // 清零读数据寄存器,其实硬件也可以自动清零
USART_DataTypeStr.Usart_Rx_Buffer[USART_DataTypeStr.Usart_Rx_Num ++] = \
(uint16_t)(USART1->DR & 0x01FF); // 将接收到的数据存入接收缓冲区
(USART_DataTypeStr.Usart_Rx_Num) &= 0xFF; // 防止缓冲区溢出
}
else if(USART_GetITStatus(USART1,USART_IT_IDLE) != RESET) // 检测空闲
{
Clear = USART1 -> SR; // 读SR位
Clear = USART1 -> DR; // 读DR位,
USART_DataTypeStr.Usart_Rx_Len = USART_DataTypeStr.Usart_Rx_Num; // 获取数据长度
for(uNum = 0; uNum < USART_DataTypeStr.Usart_Rx_Len; uNum ++)
{
USART_DataTypeStr.Usart_Rx_Data[uNum] = USART_DataTypeStr.Usart_Rx_Buffer[uNum]; // 将接收到的数据复制到接收数据缓冲区
}
USART_DataTypeStr.Usart_Rx_Num = 0; // 清空接收计数器
USART_DataTypeStr.Usart_Rc_State = 1; // 数据读取标志位置1,读取串口数据
}
if(USART_GetITStatus(USART1,USART_IT_TXE) != RESET) // 判断发送寄存器是否为非空
{
USART1->DR = \
((USART_DataTypeStr.Usart_Tx_Buffer[USART_DataTypeStr.Usart_Tx_Num ++]) & (uint16_t)0x01FF); // 发送数据
(USART_DataTypeStr.Usart_Tx_Num) &= 0xFF; // 防止缓冲区溢出
if(USART_DataTypeStr.Usart_Tx_Num >= USART_DataTypeStr.Usart_Tx_Len)
{
USART_ITConfig(USART1,USART_IT_TXE,DISABLE); // 发送完数据,关闭发送中断
USART_DataTypeStr.Usart_Tx_Num = 0; // 清空发送计数器
USART_DataTypeStr.Usart_Tc_State = 1; // 发送标志置1,可以继续发送数据了
}
}
}
(5)系统时间初始化函数( SystemTinerInit())
Tout=((arr+1)*(psc+1))/Ft us,Ft=定时器工作频率,单位:Mhz;初始化TIM3定时器,配置定时器的周期值、预分频值、计数模式等参数,并使能定时器及其中断
/*********************************************************************
@Function : 系统时间初始化
@Parameter : arr:自动重装值。
psc:时钟预分频数
@Return : N/A
@Read :Tout=((arr+1)*(psc+1))/Ft us,Ft=定时器工作频率,单位:Mhz
**********************************************************************/
void SystemTinerInit(uint16_t arr, uint16_t psc)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; // 定义TIM基本参数结构体
NVIC_InitTypeDef NVIC_InitStructure; // 定义中断优先级配置结构体
/* 时钟使能 */
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); // 使能TIM3时钟
/* TIM配置 */
TIM_TimeBaseStructure.TIM_Period = arr; // 设置定时器的周期值
TIM_TimeBaseStructure.TIM_Prescaler = psc; // 设置定时器的预分频值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; // 设置时钟分频因子为1
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; // 设置计数模式为向上计数
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); // 初始化TIM3定时器
/* 允许中断 */
TIM_ITConfig(TIM3, TIM_IT_Update, ENABLE); // 使能TIM3更新(溢出)中断
/* NVIC 配置 */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; // 设置TIM3中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 设置TIM3中断的抢占优先级为0
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 设置TIM3中断的子优先级为3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能TIM3中断通道
NVIC_Init(&NVIC_InitStructure); // 初始化NVIC
/* 使能TIMx */
TIM_Cmd(TIM3, ENABLE); // 使能TIM3定时器
}
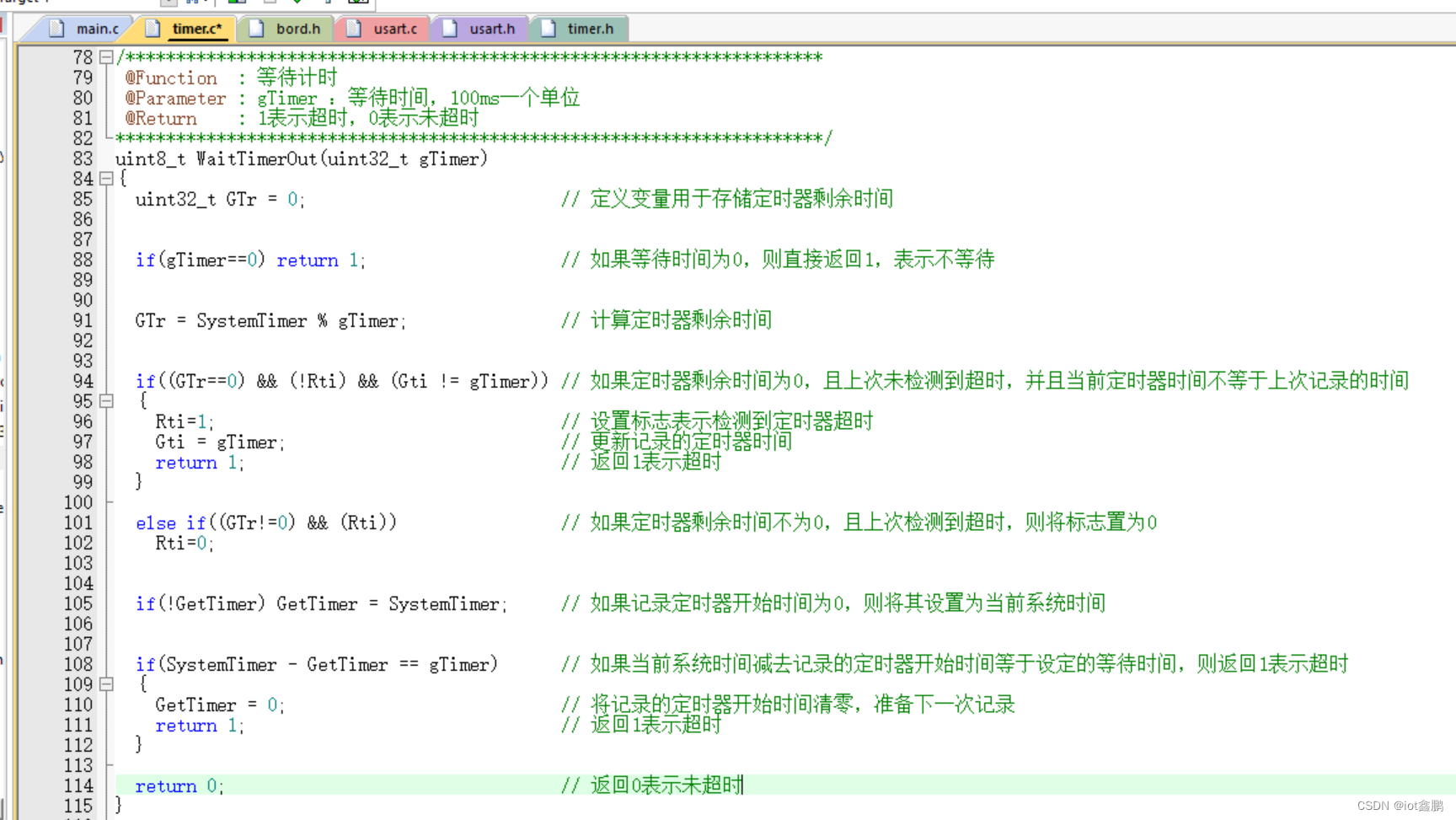
(6)等待计时函数( WaitTimerOut())
定时器超时检测功能,根据传入的参数 gTimer 和系统时钟计数器,判断定时器是否超时,并返回相应的状态。
/*********************************************************************
@Function : 等待计时
@Parameter : gTimer :等待时间,100ms一个单位
@Return : 1表示超时,0表示未超时
**********************************************************************/
uint8_t WaitTimerOut(uint32_t gTimer)
{
uint32_t GTr = 0; // 定义变量用于存储定时器剩余时间
if(gTimer==0) return 1; // 如果等待时间为0,则直接返回1,表示不等待
GTr = SystemTimer % gTimer; // 计算定时器剩余时间
if((GTr==0) && (!Rti) && (Gti != gTimer)) // 如果定时器剩余时间为0,且上次未检测到超时,并且当前定时器时间不等于上次记录的时间
{
Rti=1; // 设置标志表示检测到定时器超时
Gti = gTimer; // 更新记录的定时器时间
return 1; // 返回1表示超时
}
else if((GTr!=0) && (Rti)) // 如果定时器剩余时间不为0,且上次检测到超时,则将标志置为0
Rti=0;
if(!GetTimer) GetTimer = SystemTimer; // 如果记录定时器开始时间为0,则将其设置为当前系统时间
if(SystemTimer - GetTimer == gTimer) // 如果当前系统时间减去记录的定时器开始时间等于设定的等待时间,则返回1表示超时
{
GetTimer = 0; // 将记录的定时器开始时间清零,准备下一次记录
return 1; // 返回1表示超时
}
return 0; // 返回0表示未超时
}
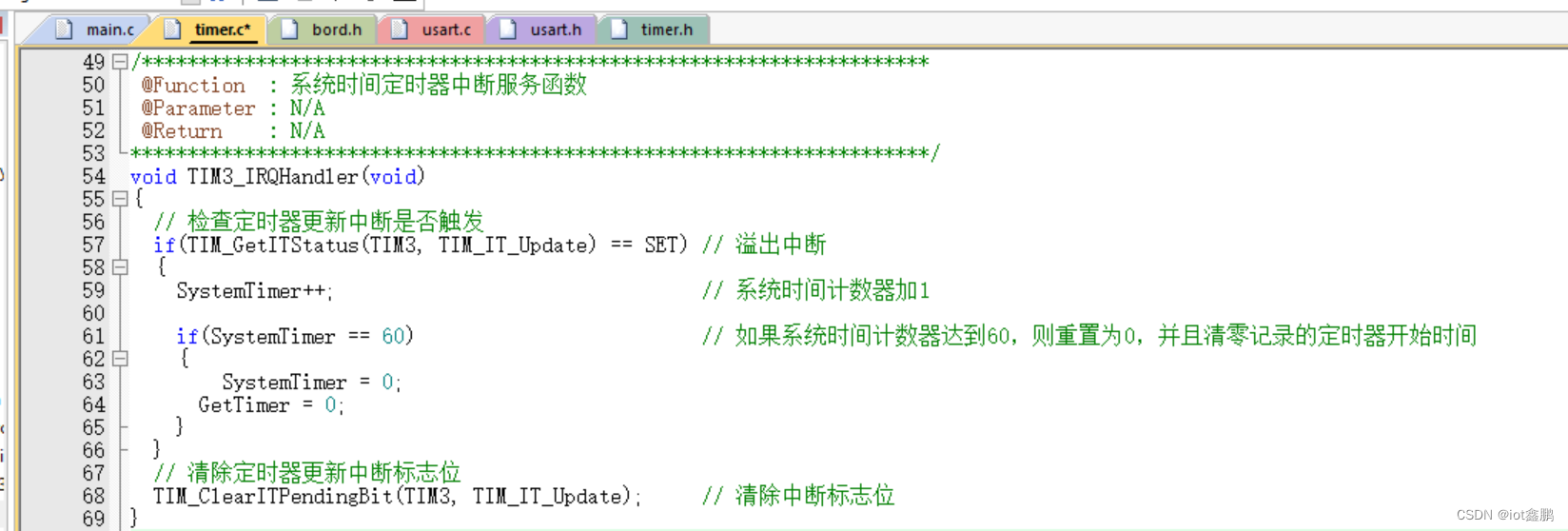
(7)系统时间定时器中断服务函数( TIM3_IRQHandler())
实现TIM3定时器的中断服务程序,每次定时器溢出时,增加 SystemTimer 计数值,并在计数到60时归零,同时清除中断标志位。
/*********************************************************************
@Function : 系统时间定时器中断服务函数
@Parameter : N/A
@Return : N/A
**********************************************************************/
void TIM3_IRQHandler(void)
{
// 检查定时器更新中断是否触发
if(TIM_GetITStatus(TIM3, TIM_IT_Update) == SET) // 溢出中断
{
SystemTimer++; // 系统时间计数器加1
if(SystemTimer == 60) // 如果系统时间计数器达到60,则重置为0,并且清零记录的定时器开始时间
{
SystemTimer = 0;
GetTimer = 0;
}
}
// 清除定时器更新中断标志位
TIM_ClearITPendingBit(TIM3, TIM_IT_Update); // 清除中断标志位
}
(8)获取系统计时时间函数( GetSystemTimer())
/*********************************************************************
@Function : 获取系统计时时间
@Parameter : N/A
@Return : N/A
**********************************************************************/
uint32_t GetSystemTimer(void)
{
return SystemTimer;
}
(9)外部中断4初始化函数( EXTIX_Init())
/*********************************************************************
@Function : 外部中断4初始化
@Parameter : N/A
@Return : N/A
**********************************************************************/
void EXTIX_Init(void)
{
EXTI_InitTypeDef EXTI_InitStructure; // 定义外部中断配置结构体
NVIC_InitTypeDef NVIC_InitStructure; // 定义中断控制器配置结构体
/*时钟使能*/
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); // 使能 AFIO 时钟,用于配置外部中断的映射
/*中断线配置*/
GPIO_EXTILineConfig(GPIO_PortSourceGPIOC, GPIO_PinSource4); // 配置外部中断线,将 PC4 映射到外部中断4
EXTI_InitStructure.EXTI_Line = EXTI_Line4; // 设置外部中断线为 EXTI4
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; // 设置外部中断模式为中断模式
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; // 设置触发方式为下降沿触发
EXTI_InitStructure.EXTI_LineCmd = ENABLE; // 使能外部中断线
EXTI_Init(&EXTI_InitStructure); // 初始化外部中断配置
/*NVIC配置*/
NVIC_InitStructure.NVIC_IRQChannel = EXTI4_IRQn; // 设置中断向量为外部中断4
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x02;// 设置抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x03; // 设置子优先级为3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 使能外部中断4
NVIC_Init(&NVIC_InitStructure); // 初始化中断控制器配置
/*关闭蜂鸣器*/
beep = 0; // 初始化蜂鸣器状态为关闭
}
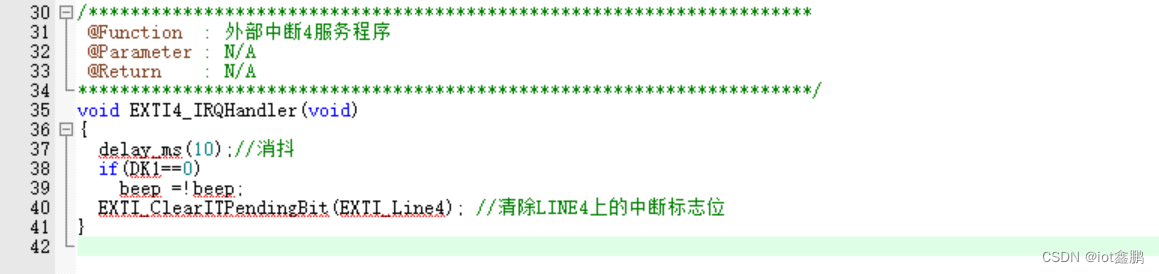
(10)外部中断4服务函数( EXTI4_IRQHandler())
/*********************************************************************
@Function : 外部中断4服务程序
@Parameter : N/A
@Return : N/A
**********************************************************************/
void EXTI4_IRQHandler(void)
{
delay_ms(10);//消抖
if(DK1==0)
beep =!beep;
EXTI_ClearITPendingBit(EXTI_Line4); //清除LINE4上的中断标志位
}
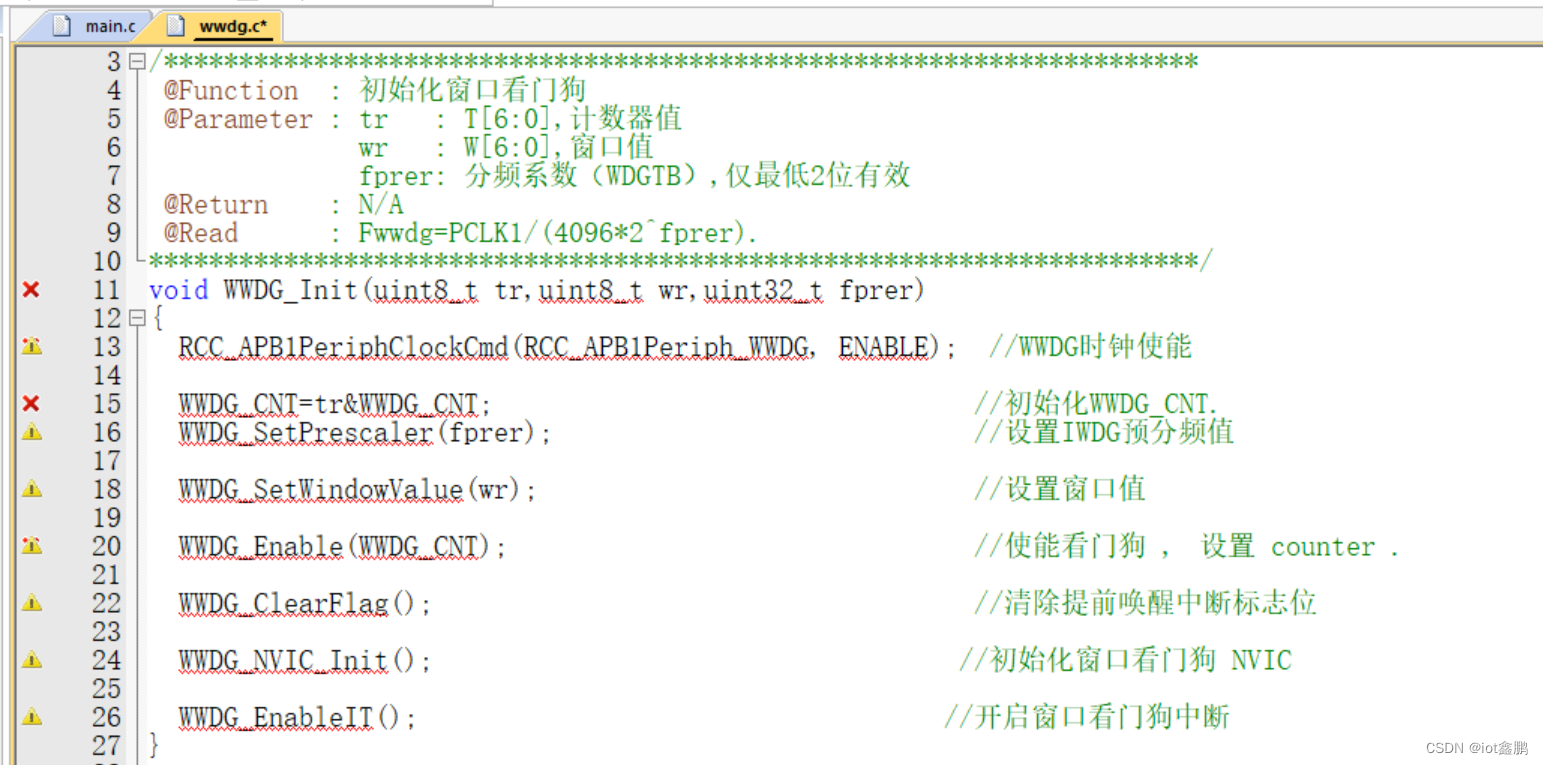
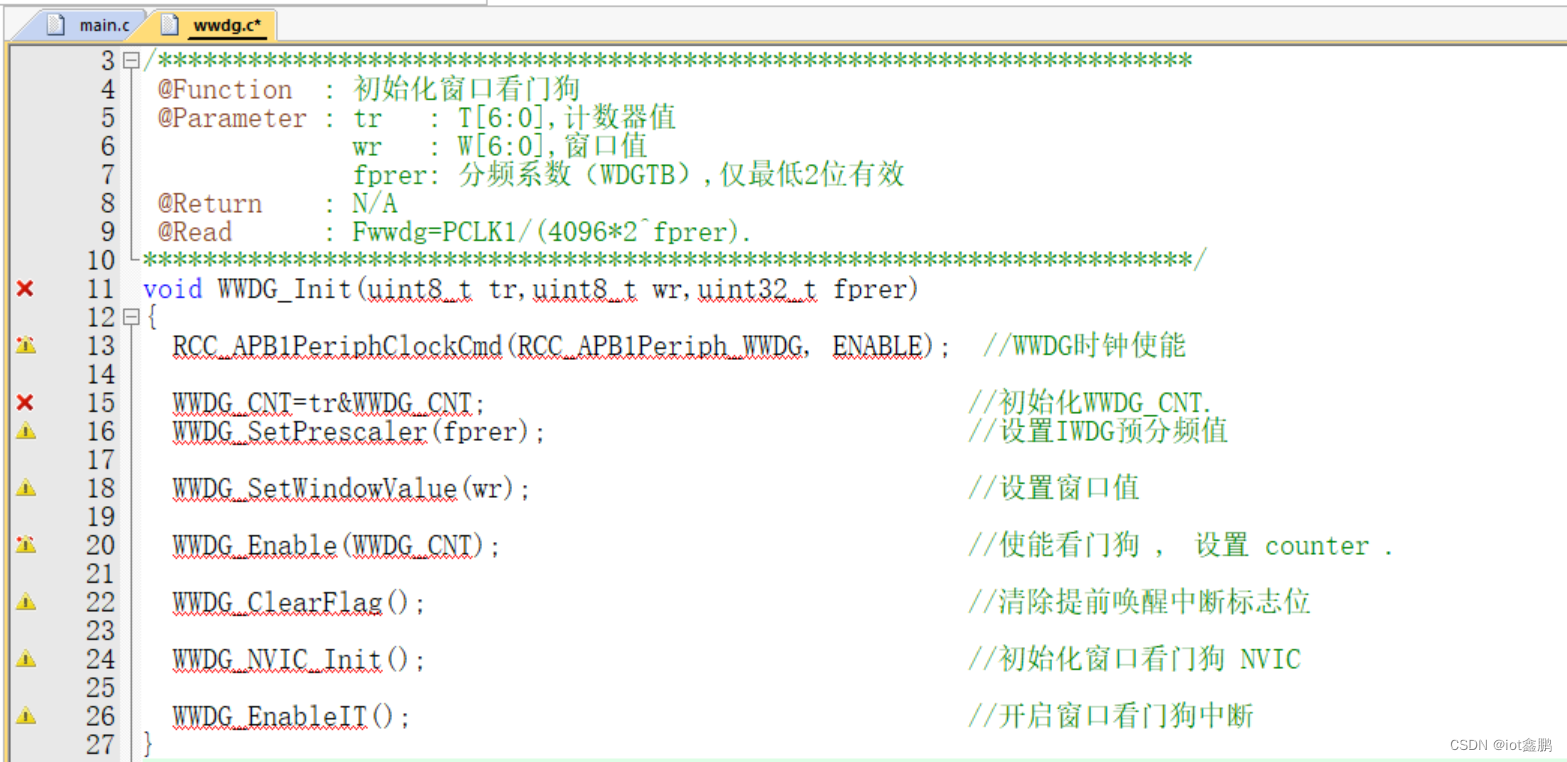
(11)窗口看门狗初始化函数(IWDG_Init())
/*********************************************************************
@Function : 初始化窗口看门狗
@Parameter : tr : T[6:0],计数器值
wr : W[6:0],窗口值
fprer: 分频系数(WDGTB),仅最低2位有效
@Return : N/A
@Read : Fwwdg=PCLK1/(4096*2^fprer).
**********************************************************************/
void WWDG_Init(uint8_t tr,uint8_t wr,uint32_t fprer)
{
RCC_APB1PeriphClockCmd(RCC_APB1Periph_WWDG, ENABLE); //WWDG时钟使能
WWDG_CNT=tr&WWDG_CNT; //初始化WWDG_CNT.
WWDG_SetPrescaler(fprer); //设置IWDG预分频值
WWDG_SetWindowValue(wr); //设置窗口值
WWDG_Enable(WWDG_CNT); //使能看门狗 , 设置 counter .
WWDG_ClearFlag(); //清除提前唤醒中断标志位
WWDG_NVIC_Init(); //初始化窗口看门狗 NVIC
WWDG_EnableIT(); //开启窗口看门狗中断
}
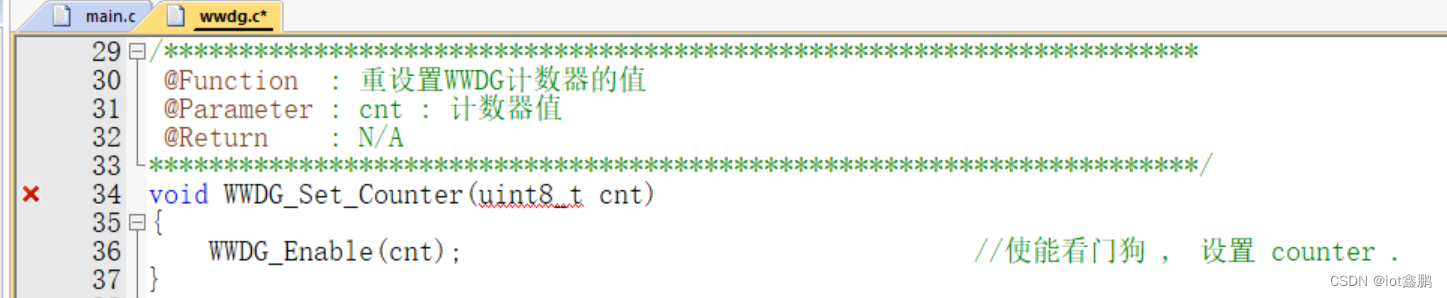
(12)喂窗口看门狗函数(WWDG_IRQHandler())
/*********************************************************************
@Function : 重设置WWDG计数器的值
@Parameter : cnt : 计数器值
@Return : N/A
**********************************************************************/
void WWDG_Set_Counter(uint8_t cnt)
{
WWDG_Enable(cnt); //使能看门狗 , 设置 counter .
}
(13)窗口看门狗中断配置函数(WWDG_NVIC_Init())
/*********************************************************************
@Function : 窗口看门狗中断配置
@Parameter : N/A
@Return : N/A
**********************************************************************/
void WWDG_NVIC_Init(void)
{
NVIC_InitTypeDef NVIC_InitStructure; // 定义 NVIC_InitTypeDef 结构体变量
NVIC_InitStructure.NVIC_IRQChannel = WWDG_IRQn; // WWDG中断
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; // 抢占2,子优先级3,组2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; // 抢占2,子优先级3,组2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; // 设置 NVIC_InitTypeDef 结构体变量
NVIC_Init(&NVIC_InitStructure); //初始化 NVIC
}
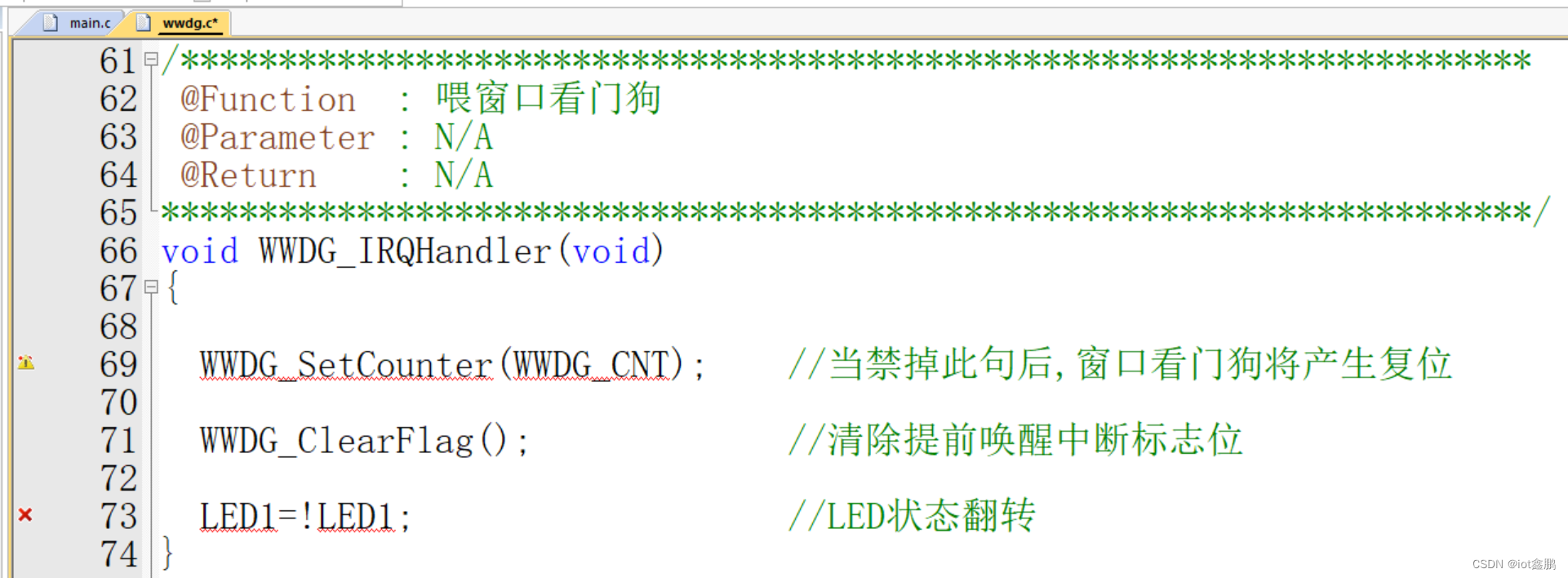
(14)喂窗口看门狗函数(WWDG_IRQHandler())
/*********************************************************************
@Function : 喂窗口看门狗
@Parameter : N/A
@Return : N/A
**********************************************************************/
void WWDG_IRQHandler(void)
{
WWDG_SetCounter(WWDG_CNT); //当禁掉此句后,窗口看门狗将产生复位
WWDG_ClearFlag(); //清除提前唤醒中断标志位
LED1=!LED1; //LED状态翻转
}
3、宏定义
步骤1:主函数添加所需的头文件,主源文件部分报错消失
#include "system_config.h"
#include "stm32f10x_gpio.h"
#include "stm32f10x_wwdg.h"
//头文件包含
/*************SYSTEM*****************/
#include ".\wwdg\wwdg.h"
/***********Hardweare***************/
#include "led.h"
步骤2:添加中断源文件所需的头文件,与定义WWDG计数器变量
#include "stm32f10x_wwdg.h"
#include "stm32f10x_rcc.h"
#include "misc.h"
#include ".\wwdg\wwdg.h"
#include "led.h"
//保存WWDG计数器的设置值,默认为最大.
uint8_t WWDG_CNT=0x7f;
步骤3:添加串口通信宏定义
#define USART_RX_LEN 200 // 接收缓冲区最大长度
#define USART_TX_LEN 200 // 发送缓冲区最大长度
#define UART_NUM 10 // 串口结构体最大对象数量

步骤4:添加函数声明
void usart1_init(uint32_t bound);
extern USART_DataTypeDef USART_DataTypeStr;
char USART1_Send_Data(char* Data,uint8_t Lenth);
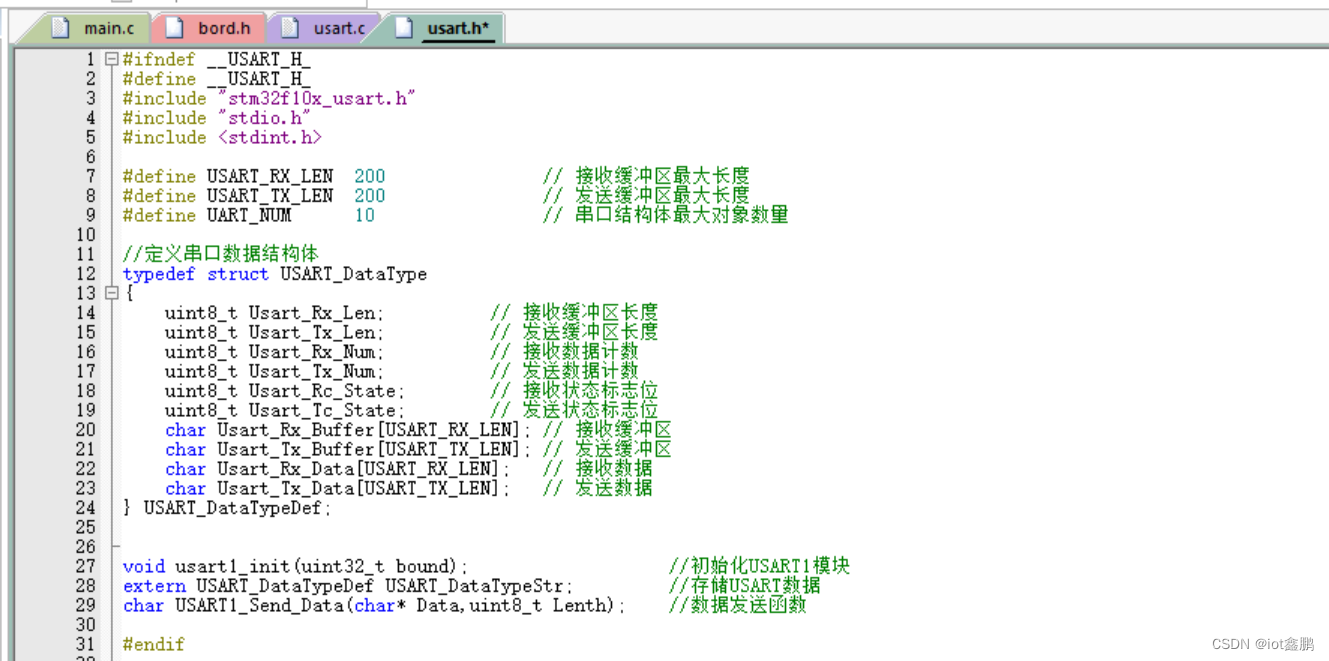
步骤5:添加数据类型和宏的头文件
//定义串口数据结构体
typedef struct USART_DataType
{
uint8_t Usart_Rx_Len; // 接收缓冲区长度
uint8_t Usart_Tx_Len; // 发送缓冲区长度
uint8_t Usart_Rx_Num; // 接收数据计数
uint8_t Usart_Tx_Num; // 发送数据计数
uint8_t Usart_Rc_State; // 接收状态标志位
uint8_t Usart_Tc_State; // 发送状态标志位
char Usart_Rx_Buffer[USART_RX_LEN]; // 接收缓冲区
char Usart_Tx_Buffer[USART_TX_LEN]; // 发送缓冲区
char Usart_Rx_Data[USART_RX_LEN]; // 接收数据
char Usart_Tx_Data[USART_TX_LEN]; // 发送数据
} USART_DataTypeDef;
步骤6:定义一个串口数组变量
USART_DataTypeDef USART_DataTypeStr={0};
定时器宏定义
步骤1:创建一个宏定义保护
#ifndef __TIMER_H
#define __TIMER_H
#endif
步骤2:添加函数声明
void SystemTinerInit(uint16_t arr,uint16_t psc);//系统时间初始化函数
uint32_t GetSystemTimer(void); //获取系统计时时间函数
uint8_t WaitTimerOut(uint32_t gTimer); //等待计时函数
步骤3:添加数据类型和宏的头文件
#include <stdint.h>
中断宏定义
步骤1:创建一个宏定义保护
#ifndef __TIMER_H
#define __TIMER_H
#endif

步骤2:添加函数声明
void EXTIX_Init(void);

步骤3:添加数据类型和宏的头文件
#include <stdint.h>
窗口看门狗宏定义
步骤1:创建一个宏定义保护
#ifndef _WWDG_H
#define _WWDG_H
#endif
步骤2:添加函数声明
void WWDG_Init(uint8_t tr,uint8_t wr,uint32_t fprer);
void WWDG_Set_Counter(uint8_t cnt);
void WWDG_NVIC_Init(void);
步骤3:添加数据类型和宏的头文件
#include <stdint.h>
4、知识链接
(1)独立看门狗
独立看门狗(IWDG)监控整个系统的运行状态,而窗口看门狗(WWDG)则监控特定任务或代码段的执行情况。
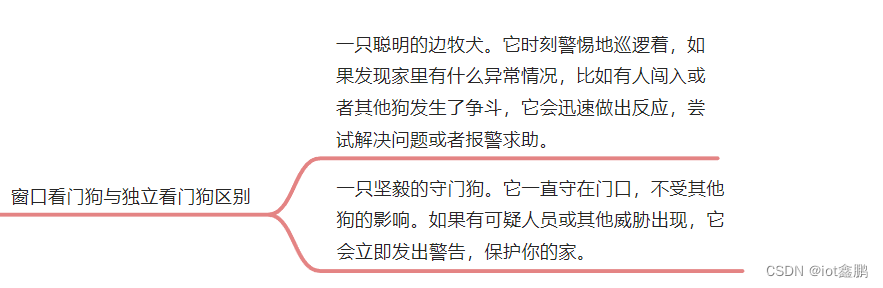
(2)两种看门狗喂狗的区别
独立看门狗(IWDG)通常通过定时器产生重置信号,需要定期喂狗以防止系统被认为出现故障;而窗口看门狗(WWDG)则在一个可调整的时间窗口内进行监控,需要在该窗口内喂狗,否则系统会被认为出现故障。
5、工程测试