前往我的主页以获得更好的阅读体验
简介
论文来源: Bridging Search Region Interaction With Template for RGB-T Tracking
现有的搜索算法通常会直接连接 RGB 和 T 模态搜索区域, 该方法存在大量冗余背景噪声. 而另一些方法从搜索帧中采样候选框, 对孤立的 RGB 框和 T 框进行各种融合, 这限制了局部区域的跨模态交互. 本文将提出模板桥接搜索区域交互(TBSI)模块, 以模板为媒介, 通过收集和分发目标相关对象和环境来桥接 RGB 和 T 搜索区域之间的跨模态交互.
方法
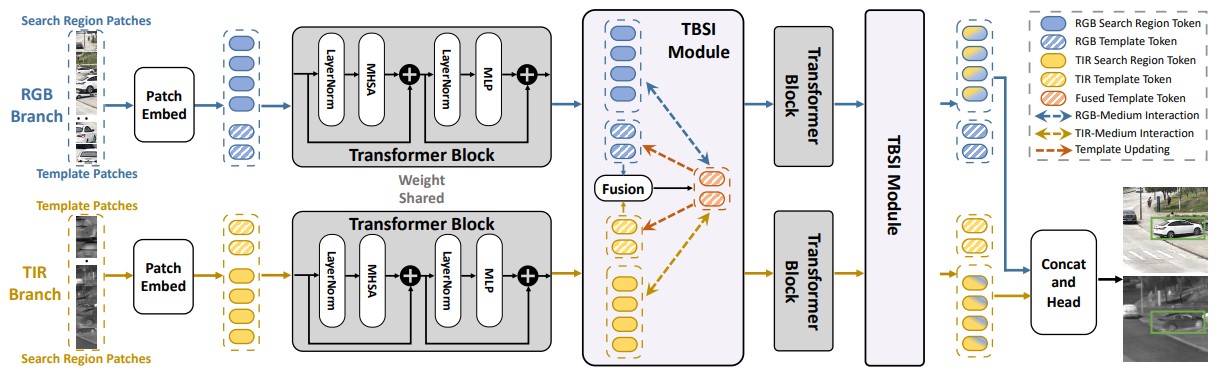
网络主体结构如上图所示, 其中主干网络为 ViT, 特征经过 Transformer 块的交互与增强后, 进入 TBSI 模块, 该操作重复两次, 最终输出结果被拼接后由预测头进行预测.
输入图像被切割为 P × P P \times P P×P 的大小, 进入具有线性投影的块嵌入层. 以 X r o r X t \bm{X}_r \ or \bm{X}_t Xr orXt 表示搜索区域, Z r o r Z t \bm{Z}_r \ or \bm{Z}_t Zr orZt 表示模板区域. 因而注意力计算可以表示为:
A = S o f t m a x ( Q K ⊤ C ) = S o f t m a x ( [ X q ; Z q ] [ X k ; Z k ] ⊤ C ) = S o f t m a x ( [ X q X k ⊤ , X q Z k ⊤ ; Z q X k ⊤ , Z q Z k ⊤ ] C ) \begin{array}{ll} \bm{A} &= Softmax \left({\large \frac{ \bm{Q} \bm{K}^\top }{ \sqrt{C} } }\right) \\\\ &= Softmax \left({\large \frac{ [\bm{X}_q; \bm{Z}_q][\bm{X}_k; \bm{Z}_k]^\top }{ \sqrt{C} } }\right) \\\\ &= Softmax \left({\large \frac{ [\bm{X}_q \bm{X}_k^\top, \bm{X}_q \bm{Z}_k^\top; \bm{Z}_q \bm{X}_k^\top, \bm{Z}_q \bm{Z}_k^\top] }{ \sqrt{C} } }\right) \end{array} A=Softmax(CQK⊤)=Softmax(C[Xq;Zq][Xk;Zk]⊤)=Softmax(C[XqXk⊤,XqZk⊤;ZqXk⊤,ZqZk⊤])
由此我们可以看出, 搜索区域与模板相互聚合彼此的特征, 通过连续 Transformer 块提取搜索区域与模板间的特征. Transformer 块的参数在 RGB 与 T 令牌之间共享, 以避免冗余.
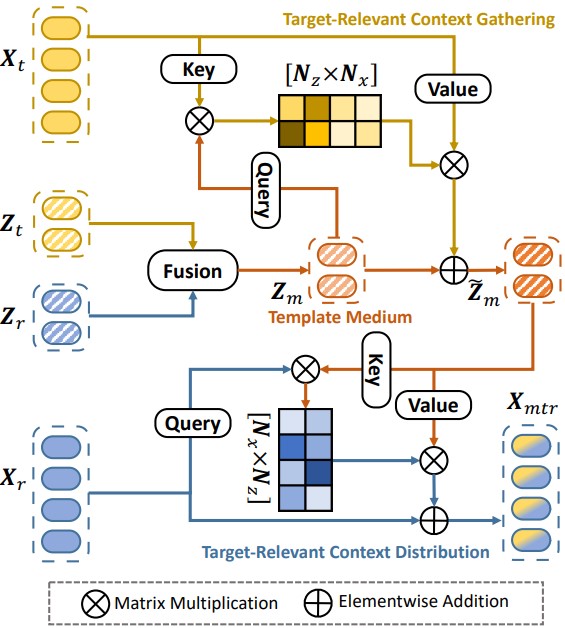
上图展示了 TBSI 模块的详细结构, 图中仅包含 T → M e d i u m → R G B T \rightarrow Medium \rightarrow RGB T→Medium→RGB 的过程, 反向过程亦是同理. 从图中可以看出, 两个模板首先融合成 Z m = [ Z r ; Z t ] W m \bm{Z}_m = [\bm{Z}_r; \bm{Z}_t] \bm{W}_m Zm=[Zr;Zt]Wm, 然后进行交叉注意力计算:
D t = S o f t m a x ( ( Z m W q 1 ) ( X t W k 1 ) ⊤ C ) ( X t W v 1 ) \bm{D}_t = Softmax\left( \frac{ (\bm{Z}_m \bm{W}_q^1)(\bm{X}_t \bm{W}_k^1)^\top }{ \sqrt{C} } \right) (\bm{X}_t \bm{W}_v^1) Dt=Softmax(C(ZmWq1)(XtWk1)⊤)(XtWv1)
于是我们就能得到细化后的融合特征:
Z m ′ = L N ( Z m + D t ) Z ~ m = L N ( Z m ′ + M L P ( Z m ′ ) ) \bm{Z}'_m = LN(\bm{Z}_m + \bm{D}_t) \\ \tilde{\bm{Z}}_m = LN(\bm{Z}'_m + MLP(\bm{Z}'_m)) Zm′=LN(Zm+Dt)Z~m=LN(Zm′+MLP(Zm′))
然后计算可见光搜索区域与细化融合特征的交叉注意力:
D m t = S o f t m a x ( ( X r W q 2 ) ( Z ~ m W k 2 ) ⊤ C ) ( Z ~ m W v 2 ) \bm{D}_{mt} = Softmax\left( \frac{ (\bm{X}_r \bm{W}_q^2)(\bm{\tilde{Z}}_m \bm{W}_k^2)^\top }{ \sqrt{C} } \right) (\tilde{\bm{Z}}_m \bm{W}_v^2) Dmt=Softmax(C(XrWq2)(Z~mWk2)⊤)(Z~mWv2)
与细化融合特征的计算方式类似, 下面是细化搜索区域的特征:
X r ′ = L N ( X r + D m t ) X ~ m t r = L N ( X r ′ + M L P ( X r ′ ) ) \bm{X}'_r = LN(\bm{X}_r + \bm{D}_{mt}) \\ \tilde{\bm{X}}_{mtr} = LN(\bm{X}'_r + MLP(\bm{X}'_r)) Xr′=LN(Xr+Dmt)X~mtr=LN(Xr′+MLP(Xr′))
目前为止只经过一次 T r a n s f o r m e r → T B S I Transformer \rightarrow TBSI Transformer→TBSI, 接下来还会再经历一次, 而第一次, 我们用 T 模态特征细化 RGB 模态, 那么在第二次, RGB 模态特征又会被用于细化 T 模态特征.
作者与各种在线或离线模型进行对比后, 发现自己设计的网络精度更高, 并且在各种挑战属性上也取得了不错的结果.
代码
代码解读