文章目录
- 奥比中光深度相机(一):环境配置
- 简介
- 电脑环境
- SDK配置步骤
- 安装环境依赖
- 填写路径,点击Configure
- 选择Visual studio
- 点击Generate
- 完成基于Python的SDK配置
- 方法一:使用Cmake直接打开
- 方法二:通过源文件打开
- 测试
奥比中光深度相机(一):环境配置
简介
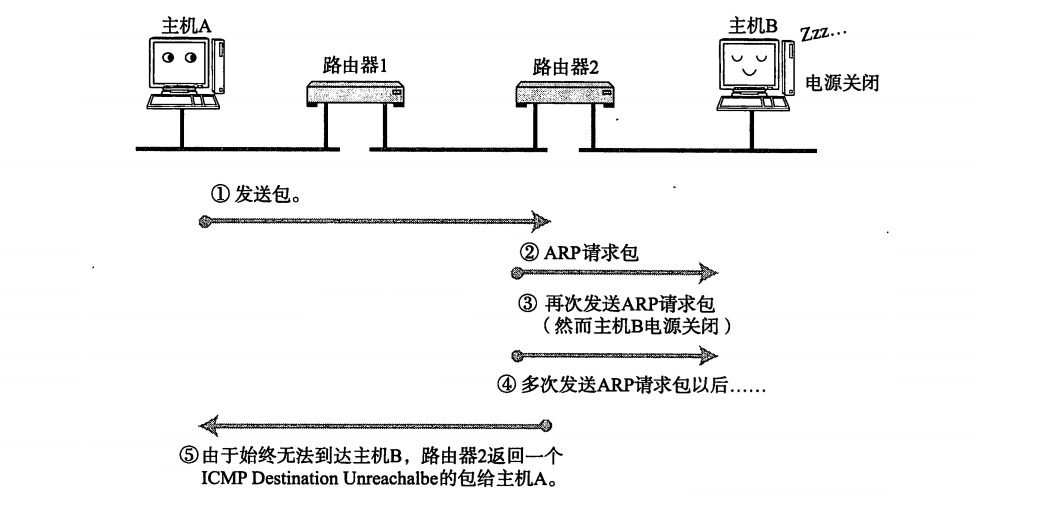
深度相机可以获取RGB-D数据,不仅可以提取目标的可将光图像,同时还能获得目标距离相机的深度信息。深度相机在测距、三维重建、动物体尺体况分析等多个方面具有广泛的应用潜力。

目前,市面上的深度相机包含多个品牌,包括Kinect系列、Intel RealSense系列以及奥比中光系列等,由于奥比中光相机开源了基于python的控制代码,大多深度学习的项目又都是基于python编写的,所以我们选择了奥比中光深度相机Gemini 2L型号。据官网介绍,如果是在室外工作的话,Gemini 2XL型号的深度相机受阳光的干扰更少一点。
下面,我们根据Gemini 2L型号的奥比中光相机展开介绍,本篇博客主要是介绍下基于python的环境配置。
电脑环境
操作系统: Windows 11 (Windows系列应该都行)
Python: 3.9 (这个要求是3.9,不然后面可能出错)
Cmake 软件: 3.28.0
SDK配置步骤
https://github.com/orbbec/pyorbbecsdk
安装环境依赖
pip3 install -r requirements.txt
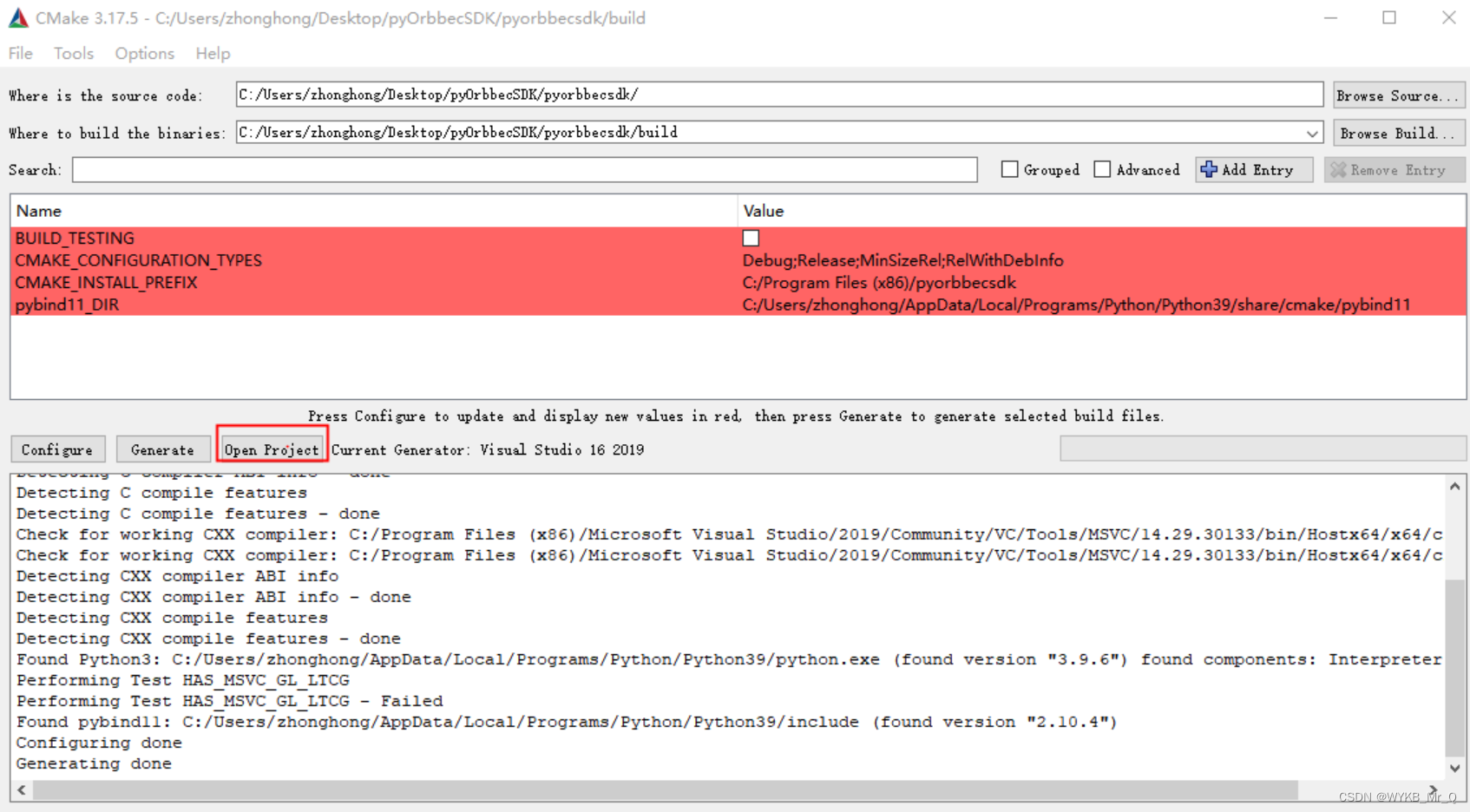
在安装好cmake软件的基础上,执行以下操作。
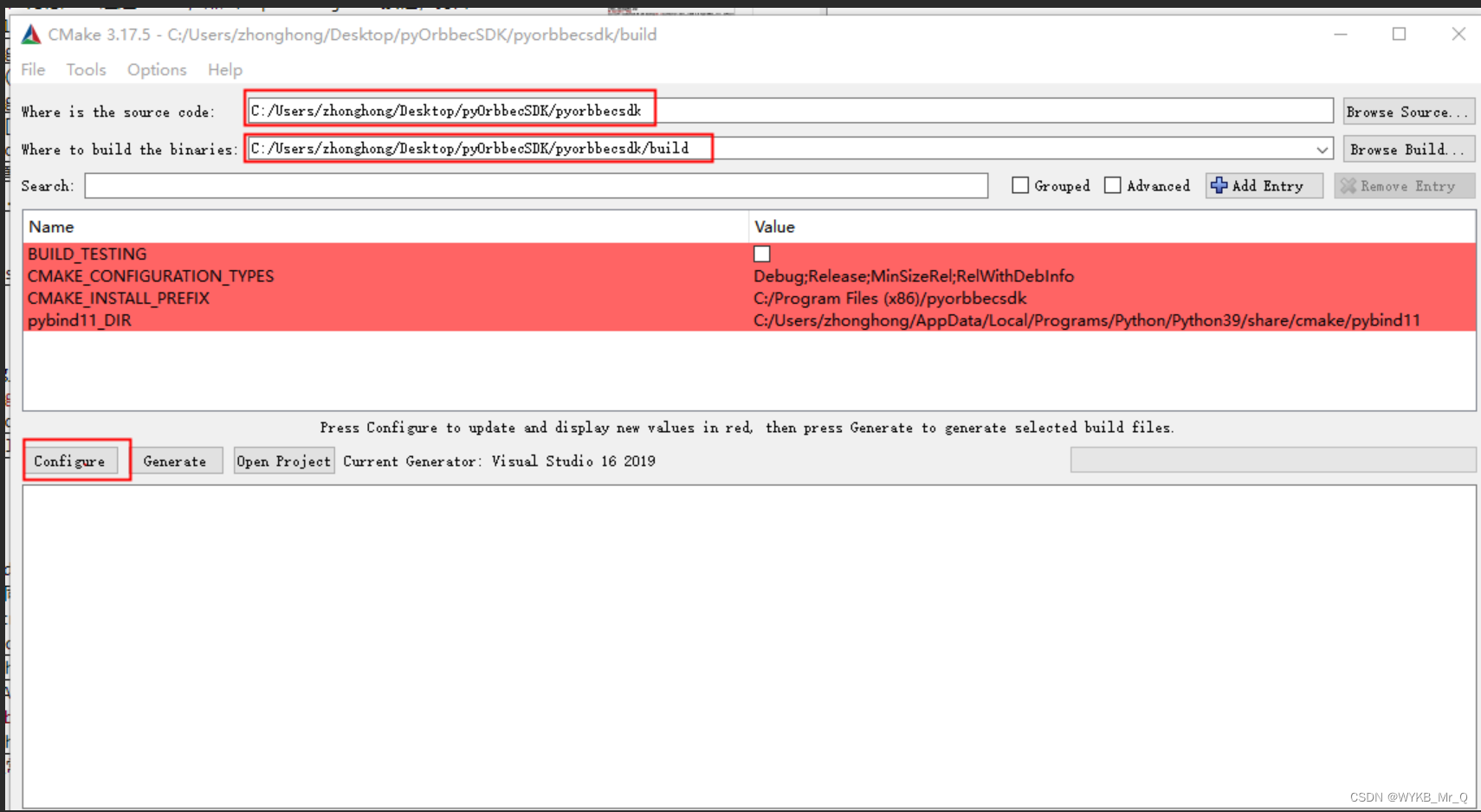
填写路径,点击Configure
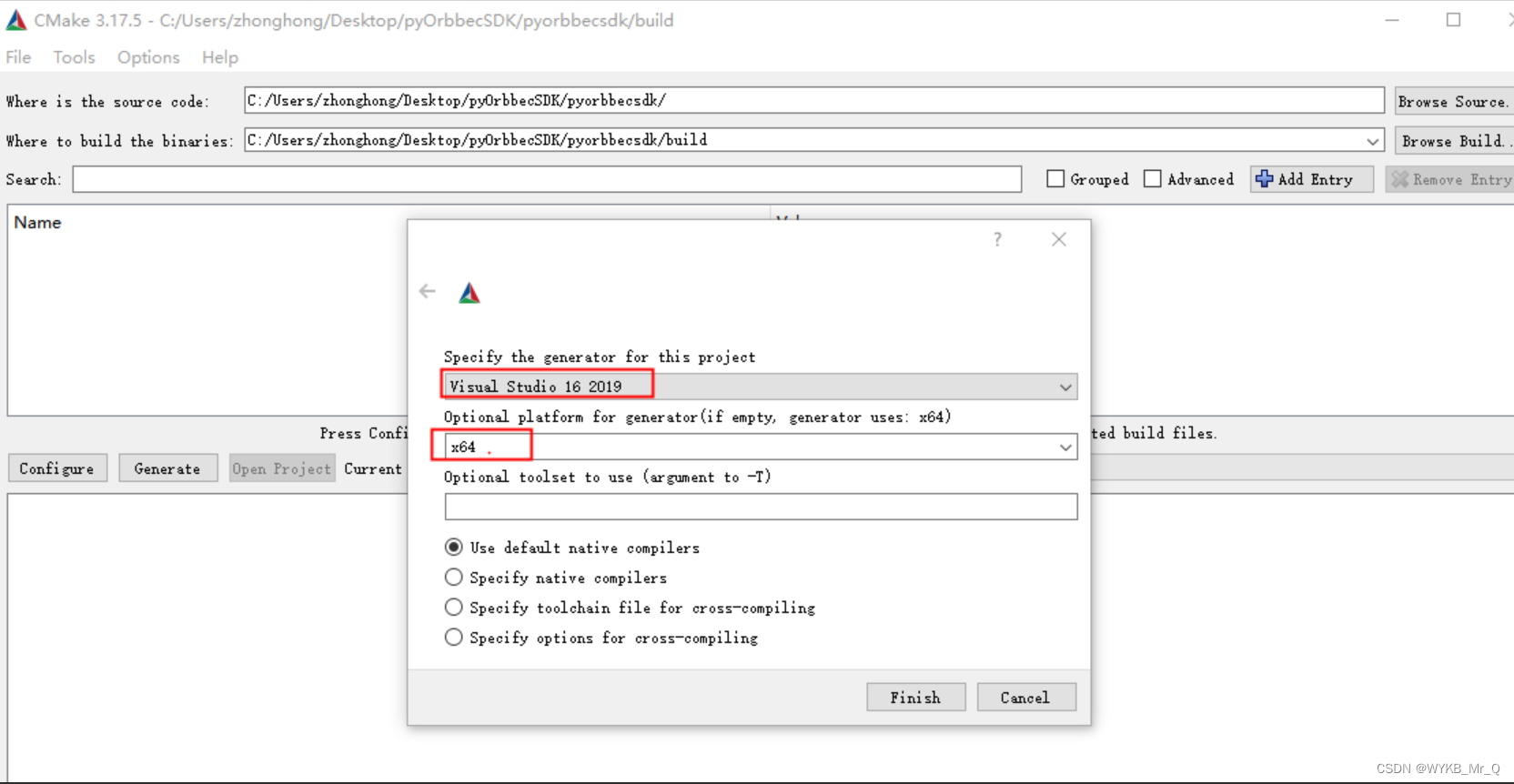
选择Visual studio
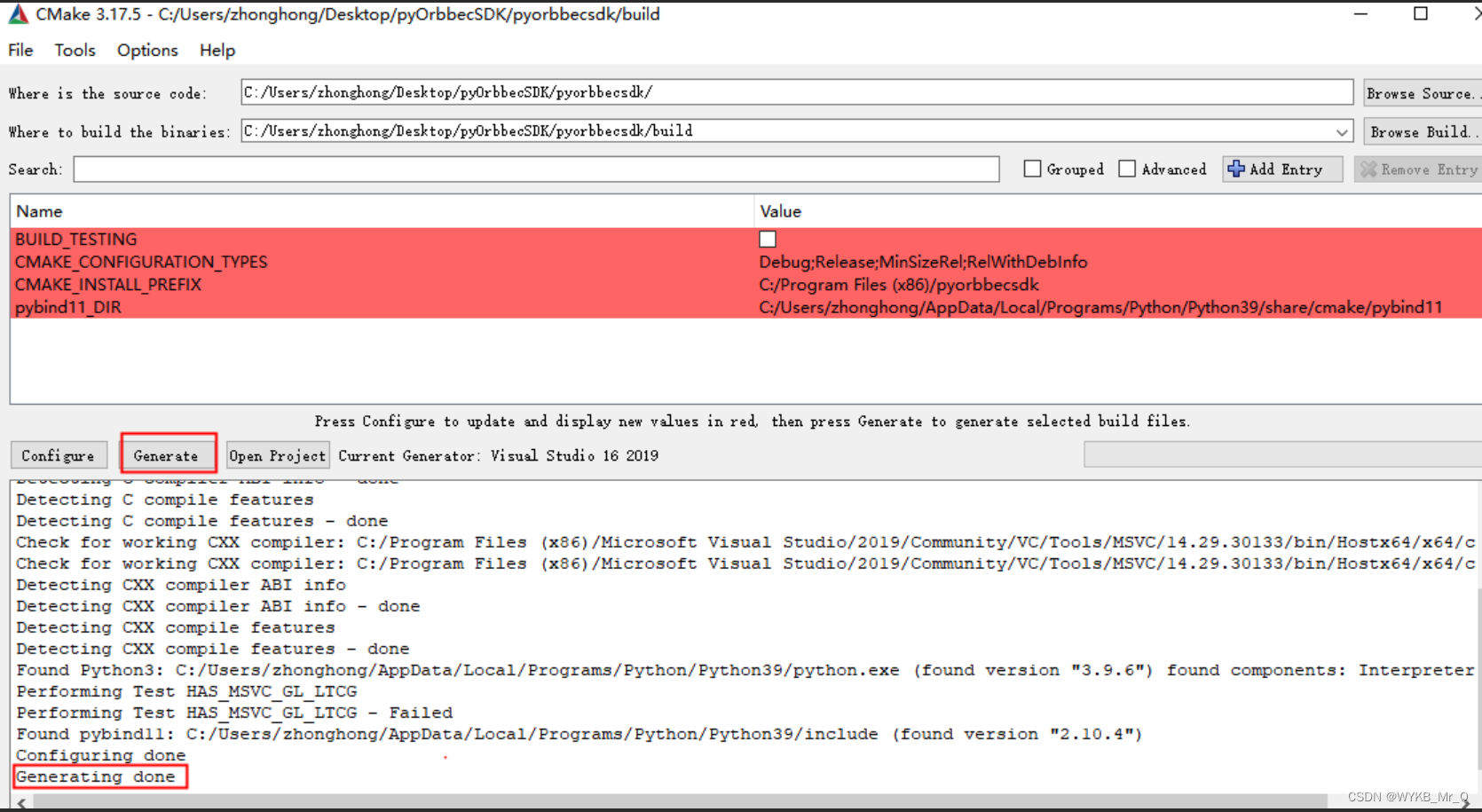
点击Generate
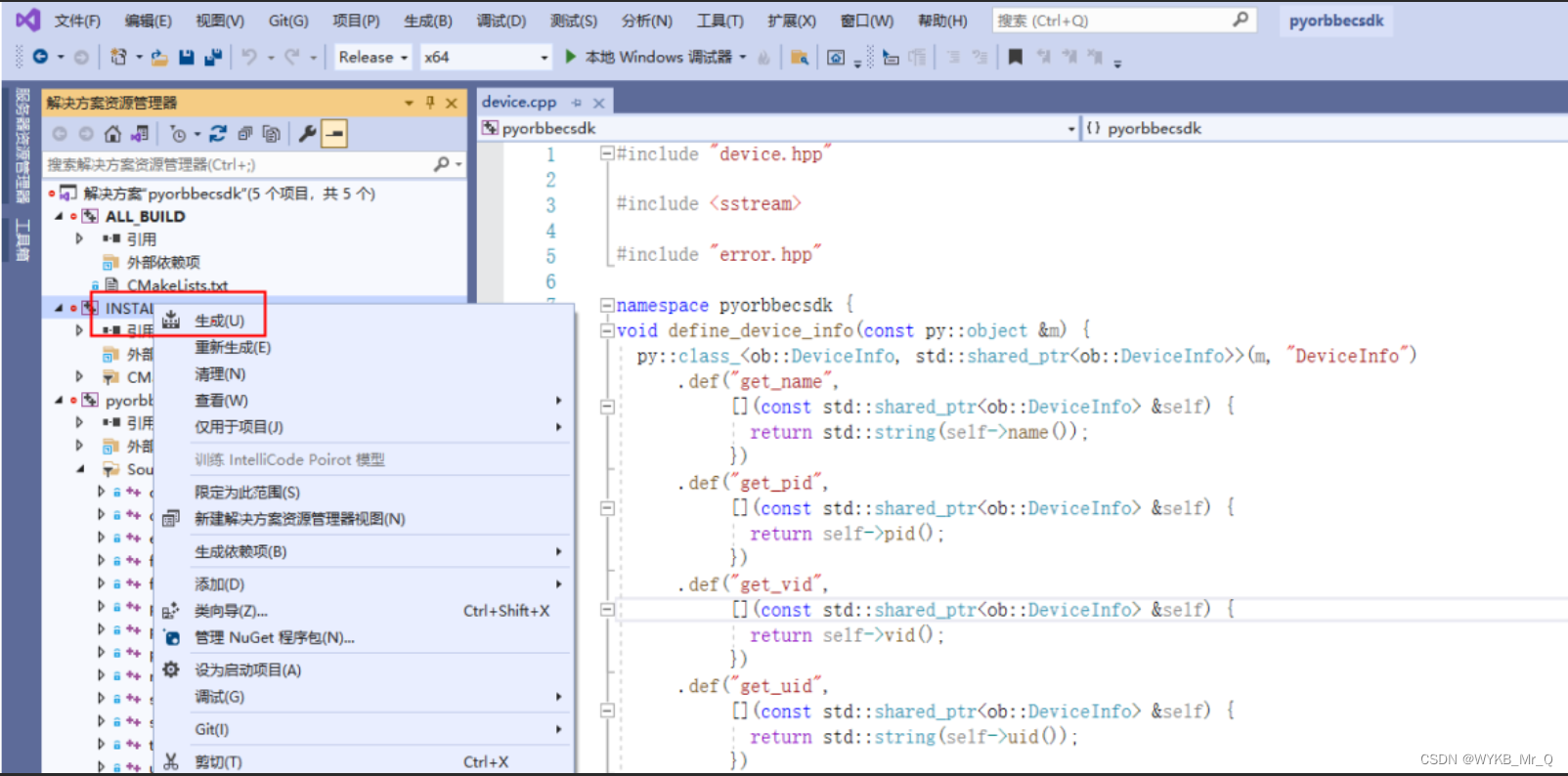
完成基于Python的SDK配置
这里有两种方法,可任选其一。
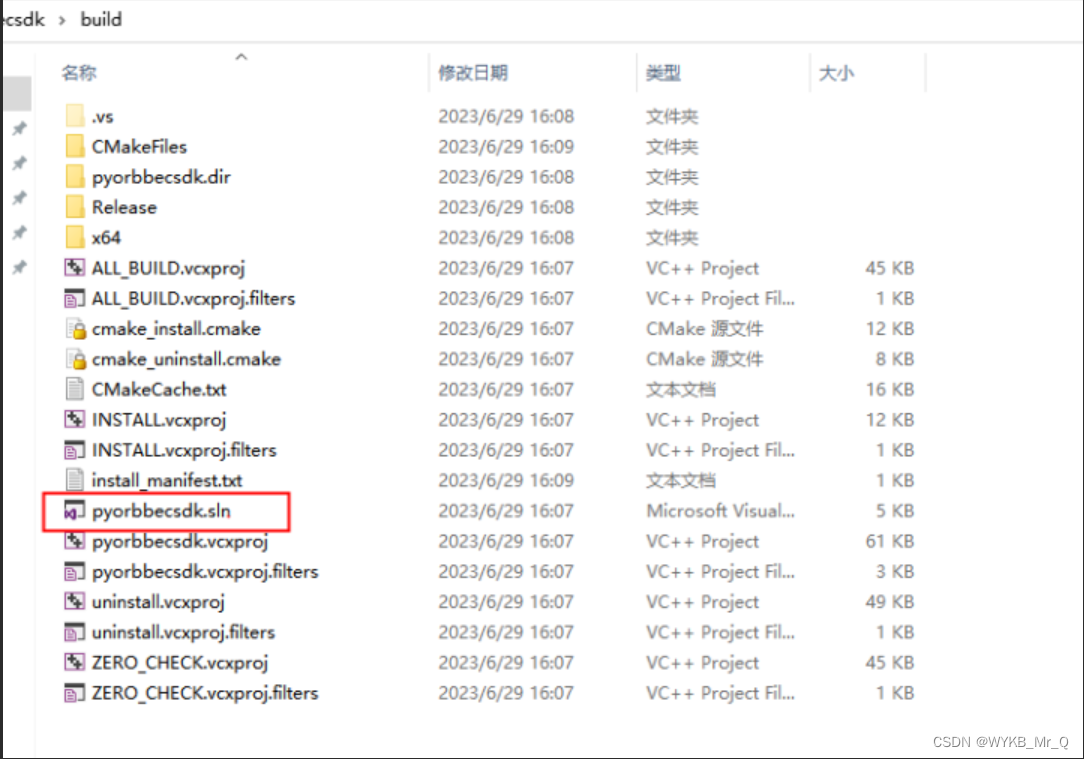
方法一:使用Cmake直接打开
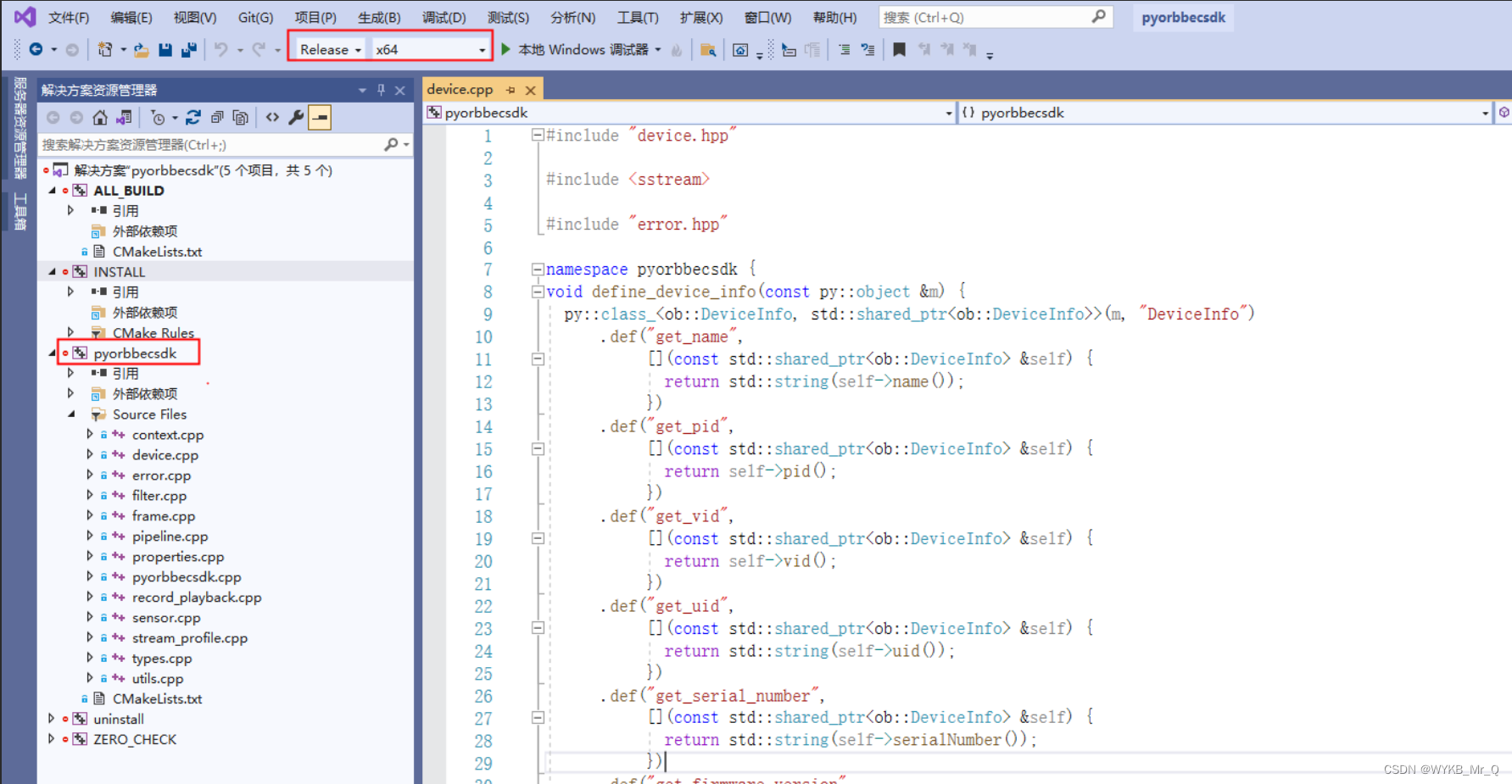
方法二:通过源文件打开
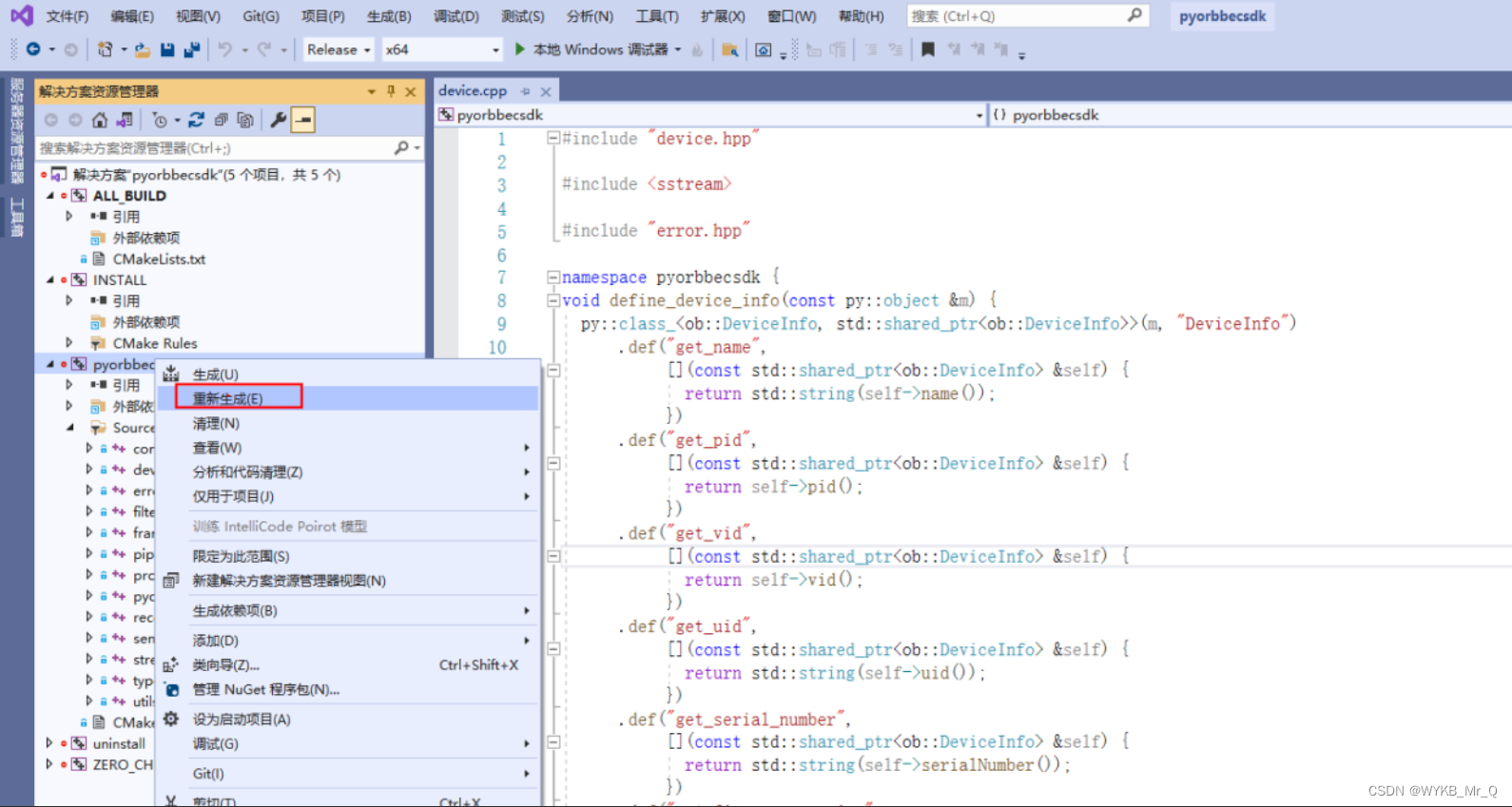
这样在install/lib文件夹中,得到了四个文件,如下所示
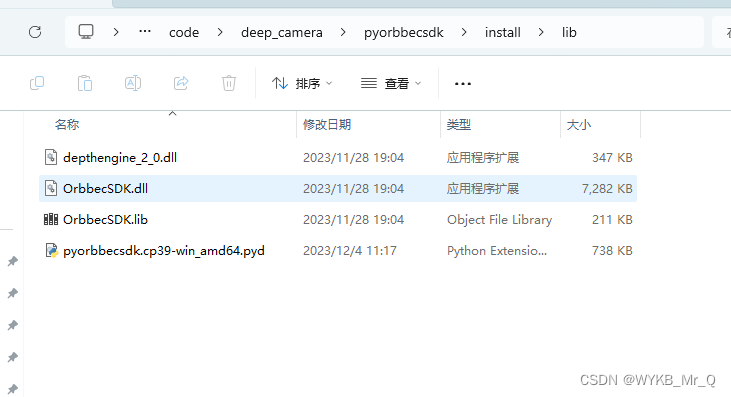
然后,将这四个文件夹复制到examples文件夹中
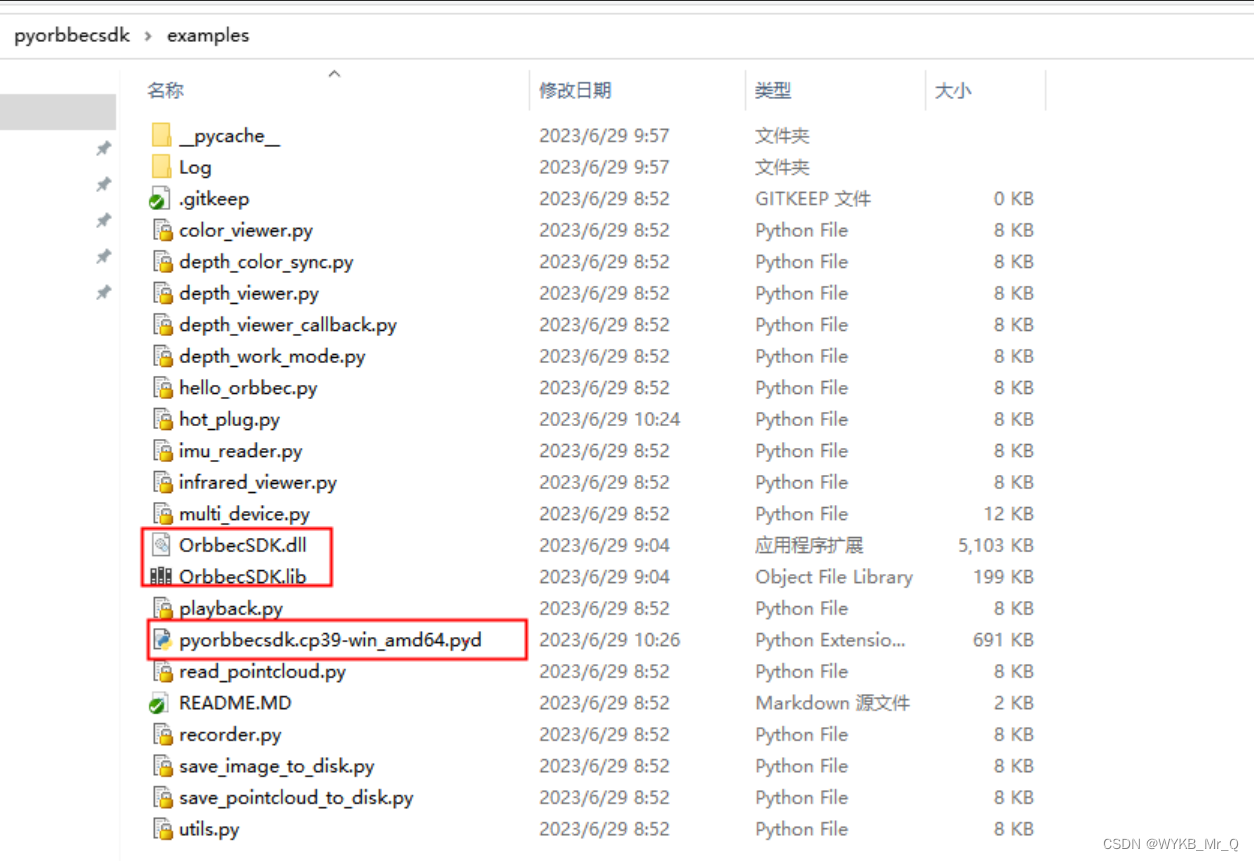
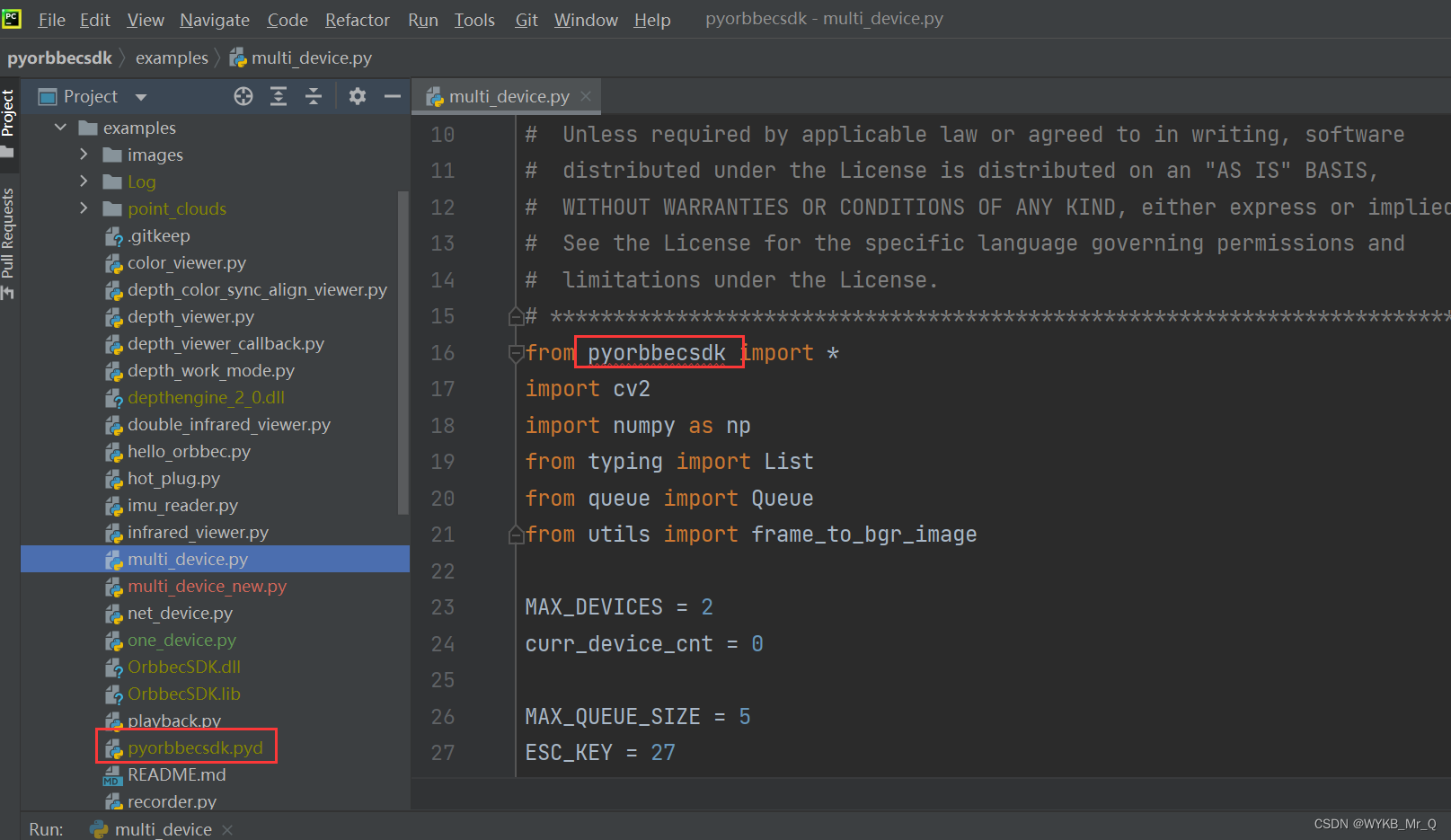
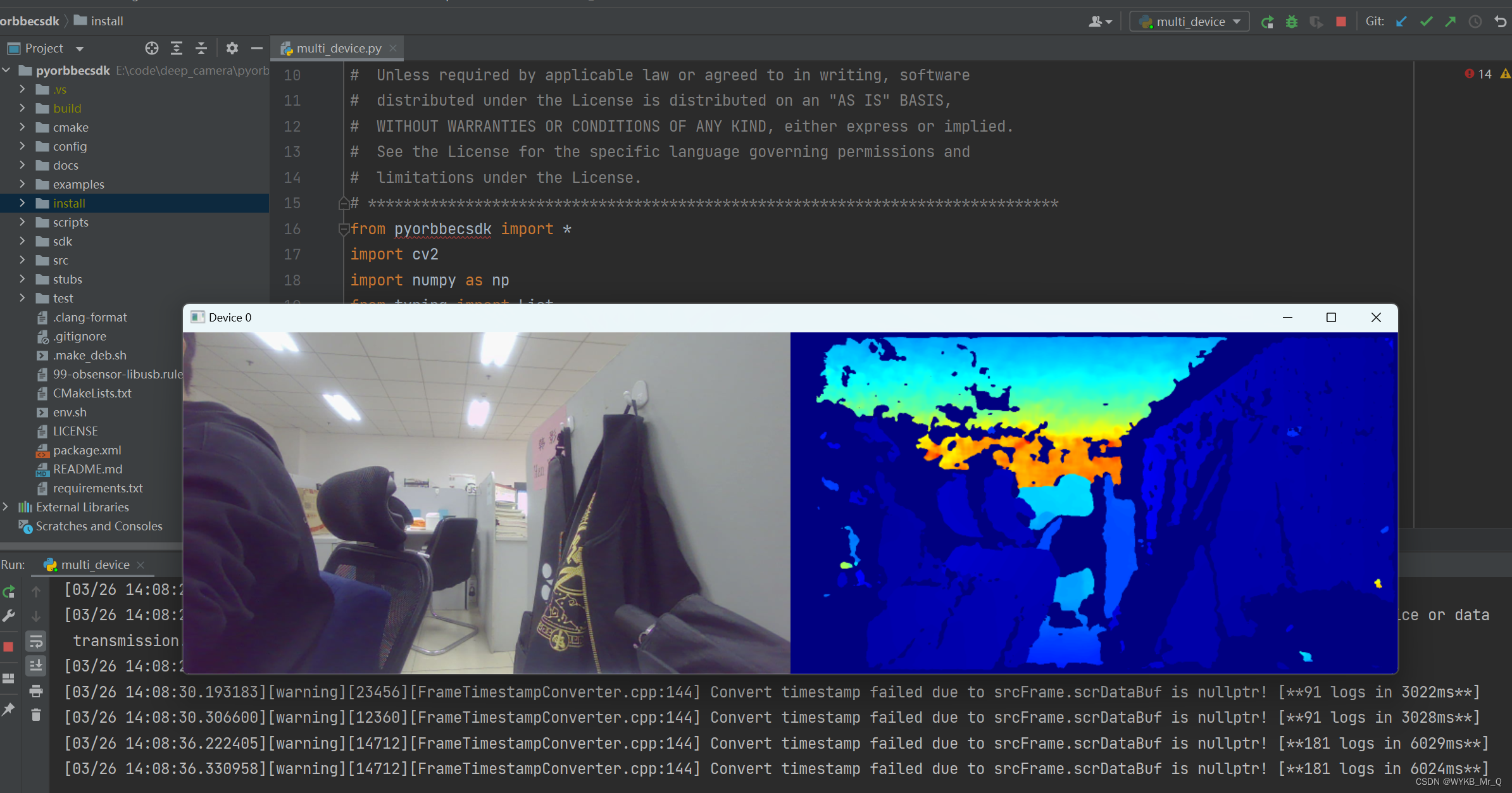
我们使用pycharm软件打开examples/multi_device.py文件,可以发现里面第一行代码是from pyorbbecsdk import *,因此我们需要将上面三个文件中的一个文件 “pyorbbecsdk.cp39-win_amd64.pyd” 重命名为“pyorbbecsdk.pyd”。此时原始代码下面画有红色波浪线,不用管就行。
之所有python要安装3.9版本,主要是为了因为生成的这个文件 “pyorbbecsdk.cp39-win_amd64.pyd” ,是cp39,我们的python版本要和这个文件对应才行,不然会出错。同理,如果生成的文件是cp38,那我们这里就只能使用python3.8版本。
测试
这样我们就把环境给配置好了,运行examples/multi_device.py文件,可以同时展示RGB图像和深度图像。
日常学习记录,一起交流讨论吧!侵权联系~







![[自研开源] MyData 数据集成之任务调度模式 v0.7](https://img-blog.csdnimg.cn/direct/85ed36e6d8464b7ba19c13b50e43e271.png)
![[C++]C/C++内存管理——喵喵要吃C嘎嘎5](https://img-blog.csdnimg.cn/direct/3dff70d7fcf24a29aea5c2695290f930.png)