Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单实战案例 之六 简单图像倾斜校正处理效果
目录
Python 基于 OpenCV 视觉图像处理实战 之 OpenCV 简单实战案例 之六 简单图像倾斜校正处理效果
一、简单介绍
二、简单图像倾斜校正处理效果实现原理
三、简单图像倾斜校正处理效果案例实现简单步骤
四、注意事项
一、简单介绍
Python是一种跨平台的计算机程序设计语言。是一种面向对象的动态类型语言,最初被设计用于编写自动化脚本(shell),随着版本的不断更新和语言新功能的添加,越多被用于独立的、大型项目的开发。Python是一种解释型脚本语言,可以应用于以下领域: Web 和 Internet开发、科学计算和统计、人工智能、教育、桌面界面开发、软件开发、后端开发、网络爬虫。
这里使用 Python 基于 OpenCV 进行视觉图像处理,......
二、简单图像倾斜校正处理效果实现原理
在 OpenCV 中,可以使用图像处理技术对图像进行倾斜纠正。一种常用的方法是通过霍夫变换检测图像中的直线,然后计算直线的角度,最后将图像根据角度进行旋转。
图像倾斜纠正的实现原理:
边缘检测:首先,将图像转换为灰度图,并使用边缘检测算法(如Canny边缘检测)找到图像中的边缘。
霍夫变换检测直线:使用霍夫变换(Hough Transform)检测图像中的直线。这可以通过
cv2.HoughLines()函数来实现。计算角度:对于每条直线,计算其与水平线的角度。一般来说,这可以通过直线的极坐标表示中的角度值来得到。
角度平均:计算所有检测到的直线的角度的平均值。这个平均角度通常代表图像的整体倾斜角度。
图像旋转:根据平均角度,使用旋转矩阵将图像进行逆时针旋转。这可以通过
cv2.getRotationMatrix2D()函数来获得旋转矩阵,并使用cv2.warpAffine()函数来应用旋转。
三、简单图像倾斜校正处理效果案例实现简单步骤
1、编写代码
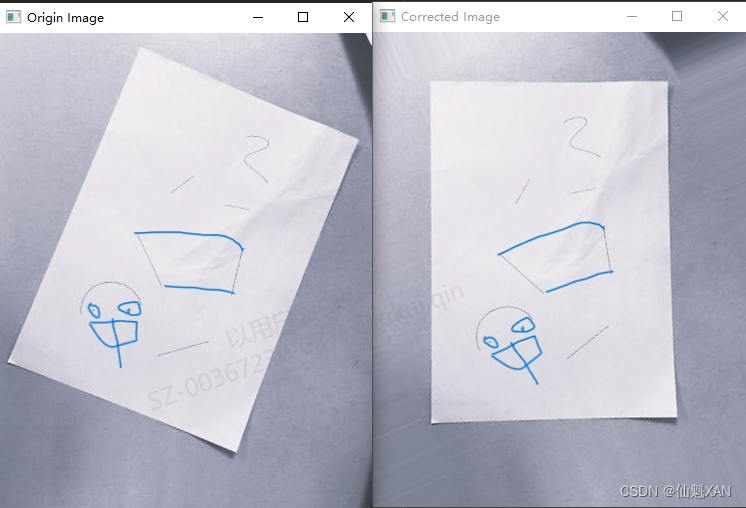
2、运行效果
3、具体代码
"""
简单图像倾斜校正处理效果
1、首先将图像转换为灰度图,并使用 Canny 边缘检测算法检测图像边缘。
2、然后,我们使用霍夫变换检测图像中的直线,并计算直线的角度。
3、接着,我们计算直线角度的中位数,并根据该角度对图像进行旋转。
4、最后,我们显示了纠正后的图像。
"""
import cv2
import numpy as np
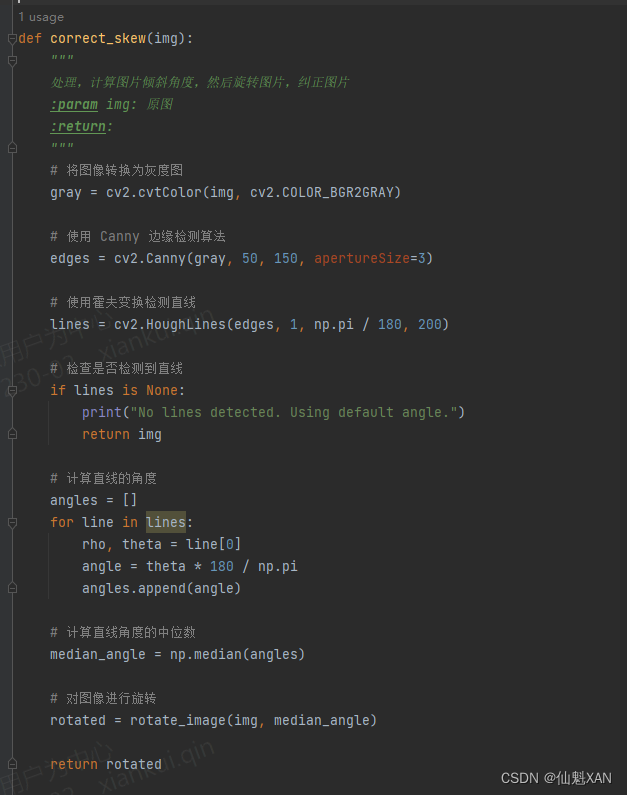
def correct_skew(img):
"""
处理,计算图片倾斜角度,然后旋转图片,纠正图片
:param img: 原图
:return:
"""
# 将图像转换为灰度图
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用 Canny 边缘检测算法
edges = cv2.Canny(gray, 50, 150, apertureSize=3)
# 使用霍夫变换检测直线
lines = cv2.HoughLines(edges, 1, np.pi / 180, 200)
# 检查是否检测到直线
if lines is None:
print("No lines detected. Using default angle.")
return img
# 计算直线的角度
angles = []
for line in lines:
rho, theta = line[0]
angle = theta * 180 / np.pi
angles.append(angle)
# 计算直线角度的中位数
median_angle = np.median(angles)
# 对图像进行旋转
rotated = rotate_image(img, median_angle)
return rotated
def rotate_image(img, angle):
"""
旋转纠正图片
:param img:
:param angle:
:return:
"""
# 获取图像的中心点坐标
height, width = img.shape[:2]
center = (width / 2, height / 2)
# 计算旋转矩阵
matrix = cv2.getRotationMatrix2D(center, angle, 1.0)
# 进行图像旋转
rotated = cv2.warpAffine(img, matrix, (width, height), flags=cv2.INTER_CUBIC, borderMode=cv2.BORDER_REPLICATE)
return rotated
def main():
# 读取图像
image = cv2.imread('Images/Tilt.jpg')
# 显示结果
cv2.imshow('Origin Image', image)
# 对图像进行倾斜纠正
corrected_image = correct_skew(image)
# 显示结果
cv2.imshow('Corrected Image', corrected_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
if __name__ == '__main__':
main()
四、注意事项
- 直线检测的阈值设置:霍夫变换检测直线时,阈值的设置会影响直线检测的准确性。需要根据实际情况调整阈值参数。
- 角度计算的精度:角度的计算精度会影响到最终结果的准确性。在计算角度时,可以考虑使用更高的精度来提高准确性。
- 旋转矩阵的边界处理:在计算旋转矩阵时,需要考虑到旋转后图像可能会超出原始图像的边界,因此需要使用合适的边界模式来处理这种情况,以避免产生不良影响。
- 异常处理:在实际应用中,需要考虑到图像中可能不存在直线的情况,因此需要进行异常处理,确保程序的稳定性。




![NSS [SWPUCTF 2022 新生赛]Power!](https://img-blog.csdnimg.cn/img_convert/9c120623520a25684e86f3091df2168e.png)