mkdir -p catkin_workspace/src
cd catkin_workspace/src
git clone --recursive git@github.com:leggedrobotics/darknet_ros.git
cd ../
在ROS工作空间目录下,执行命令:
catkin_make -DCMAKE_BUILD_TYPE=Release发布摄像头图像话题:
roslaunch usb_cam usb_cam-test.launch

运行darknet_ros
然后执行darknet_ros进行检测,在运行检测之前需要更改一下配置文件,使得darknet_ros订阅的话题与usb_cam发布的图片话题对应。
打开darknet_ros/config/ros.yaml文件,修改:

回到darknet的工作空间根目录,执行:
-
source devel/setup.bash -
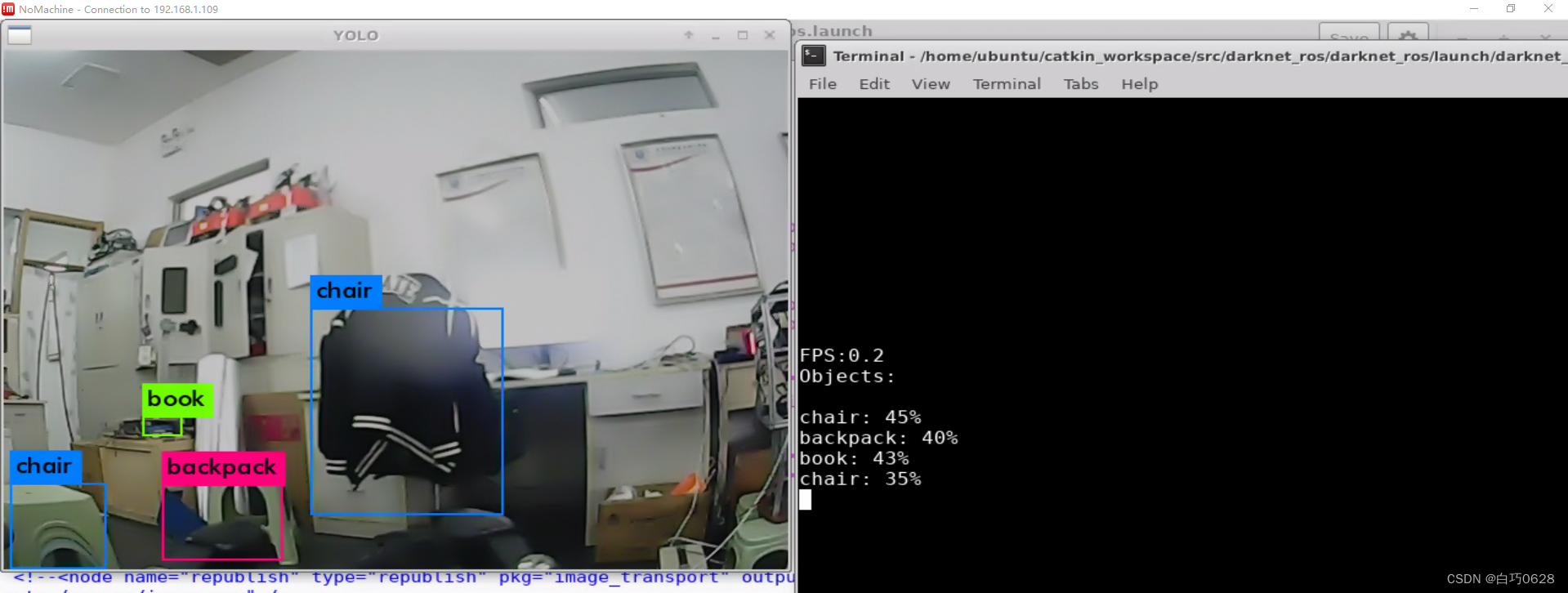
roslaunch darknet_ros darknet_ros.launch
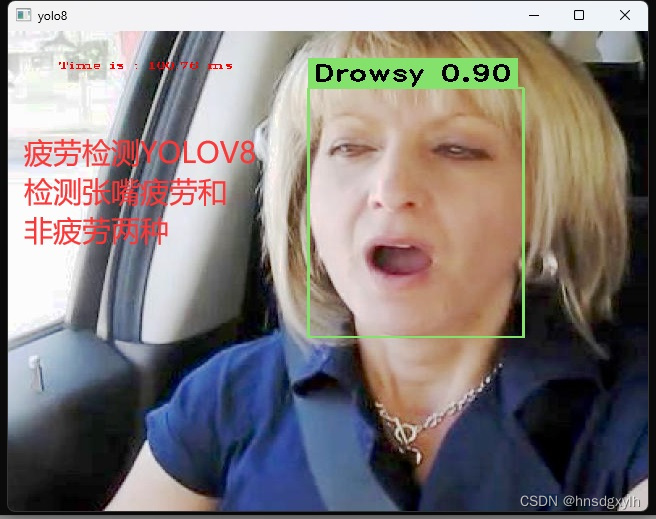
出现对摄像头采集图像的实时检测结果。
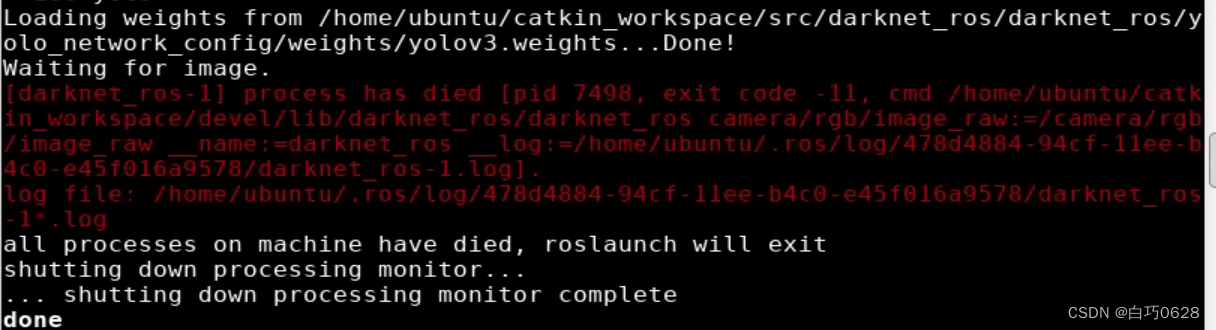
预训练集换成YOLO v3的来检测

换完以后发现启动不成功,这里我使用的是树莓派,可能是性能带不动