一.ScoEditor下载霸王•吕布 / ScoEditor · GitCode![]() https://gitcode.net/qq_35829452/scoeditor二.ScoEditor导出文件种类
https://gitcode.net/qq_35829452/scoeditor二.ScoEditor导出文件种类
mission_objects.json:场景物/出生点/通道等物体
layer_ground_elevation.pfm:场景terrain/ground地形增量,采用PFM深度图存储
ai_mesh.obj:AI网格静态模型,由点/线面构成
三.mission_objects.json
object_type = ['prop', 'entry', 'item', 'unused', 'plant', 'passage']
object = {
'type': object_type[type], 类型,场景物/出生点/通道
'id': id, ID.scene_props.py定义ID
'garbage': '%0#x' % garbage,
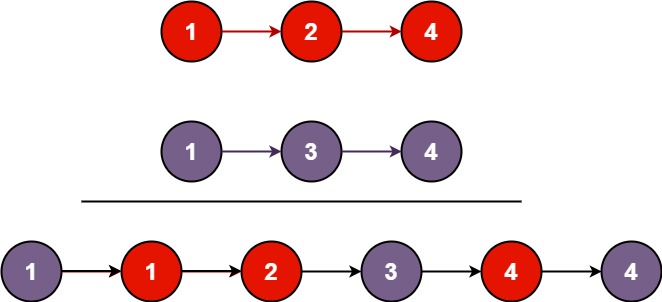
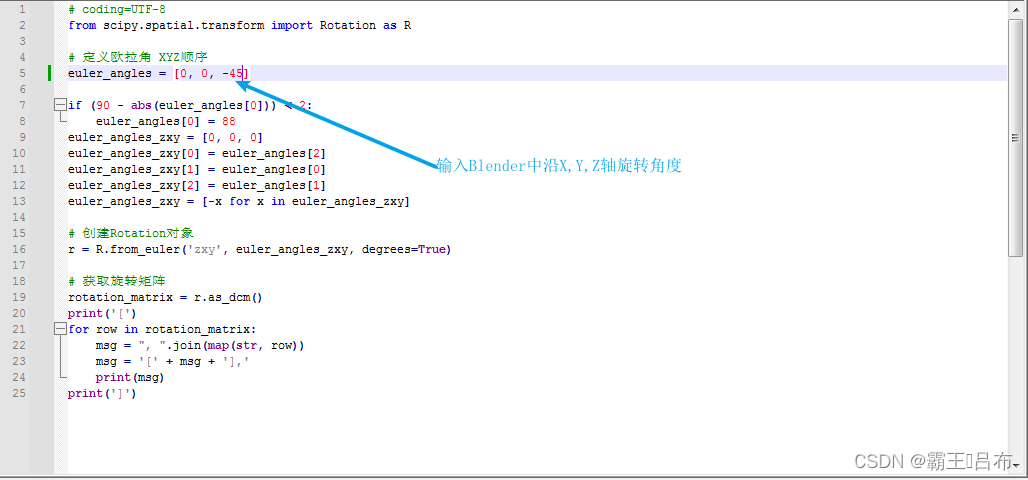
'rotation_matrix': [mtx_a, mtx_b, mtx_c], 旋转矩阵(右手坐标系,ZXY顺序旋转),转化后获得沿XYZ旋转角度
'pos': pos, 世界坐标系坐标
'str': str, spr_torch等标识
'entry_no': entry_no, (若为prop则prop_instance_get_variation_id获取)
'menu_entry_no': menu_item_no,(若为prop则prop_instance_get_variation_id_2获取)
'scale': scale, 伸缩变换比例
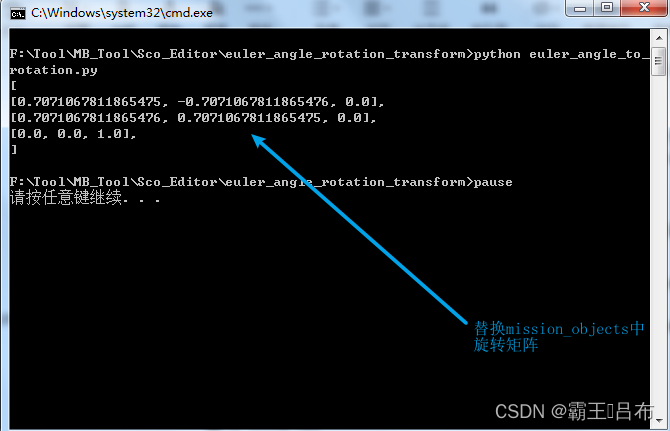
}<1.旋转角度转化:euler_angle_to_rotation.bat/rotation_to_euler_angle.bat
将Blender旋转角度调整为ZXY模式,输入rotx,roty,rotz至 euler_angle_to_rotation.py中得到旋转矩阵,拷贝至mission_objects.json.
<2.blender python脚本实现导出mission_object.json
import bpy
import math
import json
import mathutils
# mission_obj data_format
# object_type = ['prop', 'entry', 'item', 'unused', 'plant', 'passage']
# object = {
# 'type': object_type[type], 类型,场景物/出生点/通道
# 'id': id, ID.scene_props.py定义ID
# 'garbage': '%0#x' % garbage,
# 'rotation_matrix': [mtx_a, mtx_b, mtx_c], 旋转矩阵(右手坐标系,ZXY顺序旋转),转化后获得沿XYZ旋转角度
# 'pos': pos, 世界坐标系坐标
# 'str': str, spr_torch等标识
# 'entry_no': entry_no, (若为prop则prop_instance_get_variation_id获取)
# 'menu_entry_no': menu_item_no,(若为prop则prop_instance_get_variation_id_2获取)
# 'scale': scale, 伸缩变换比例
#}
# 获取当前场景中所有的对象
objects = bpy.context.scene.objects
mission_objects = []
for object in objects:
mission_obj = {}
mission_obj['type'] = object.get('type')
mission_obj['id'] = object.get('id')
mission_obj['garbage'] = object.get('garbage')
rotation_euler_XYZ = object.rotation_euler.copy()
rotation_euler_XYZ[0] = rotation_euler_XYZ[0] * -1
rotation_euler_XYZ[1] = rotation_euler_XYZ[1] * -1
rotation_euler_XYZ[2] = rotation_euler_XYZ[2] * -1
rot_matrix = rotation_euler_XYZ.to_matrix()
mission_obj['rotation_matrix'] = [
[rot_matrix[0][0], rot_matrix[0][1], rot_matrix[0][2]],
[rot_matrix[1][0], rot_matrix[1][1], rot_matrix[1][2]],
[rot_matrix[2][0], rot_matrix[2][1], rot_matrix[2][2]],
]
mission_obj['pos'] = [object.location.x, object.location.y, object.location.z]
mission_obj['str'] = object.get('str')
mission_obj['entry_no'] = object.get('entry_no')
mission_obj['menu_entry_no'] = object.get('menu_entry_no')
mission_obj['scale'] = [object.scale.x, object.scale.y, object.scale.z]
mission_objects.append(mission_obj)
mission_objects_json = json.dumps(mission_objects, indent=4)
# 打开文件进行写入,如果文件不存在则创建
with open('F:\mission_objects.json', 'w', encoding='utf-8') as file:
file.write(mission_objects_json) # 将字符串写入文件<3.blender python脚本实现导入mission_object.json
import bpy
import math
import json
import mathutils
# mission_obj data_format
# object_type = ['prop', 'entry', 'item', 'unused', 'plant', 'passage']
# object = {
# 'type': object_type[type], 类型,场景物/出生点/通道
# 'id': id, ID.scene_props.py定义ID
# 'garbage': '%0#x' % garbage,
# 'rotation_matrix': [mtx_a, mtx_b, mtx_c], 旋转矩阵(右手坐标系,ZXY顺序旋转),转化后获得沿XYZ旋转角度
# 'pos': pos, 世界坐标系坐标
# 'str': str, spr_torch等标识
# 'entry_no': entry_no, (若为prop则prop_instance_get_variation_id获取)
# 'menu_entry_no': menu_item_no,(若为prop则prop_instance_get_variation_id_2获取)
# 'scale': scale, 伸缩变换比例
#}
# 获取当前场景中所有的对象
objects = bpy.context.scene.objects
def get_object_by_mission_object(mission_object):
spr_name = mission_object["str"]
type = mission_object["type"]
if type == 'entry':
return objects["lol_entry_point"]
elif type == 'prop':
for object in objects:
if ('spr_' + object.name) == spr_name:
return object
def handle_mission_object(mission_object_index, mission_object):
object = get_object_by_mission_object(mission_object)
new_obj = object.copy()
new_obj.data = object.data.copy()
new_obj.data.materials[0] = object.data.materials[0].copy()
new_obj.rotation_euler = object.rotation_euler.copy()
new_obj.location = object.location.copy()
new_obj.scale = object.scale.copy()
new_obj.name = object.name + '_' + str(mission_object_index)
#set mission_object pos rotation and scale
new_obj.location.x = mission_object["pos"][0]
new_obj.location.y = mission_object["pos"][1]
new_obj.location.z = mission_object["pos"][2]
new_obj.scale.x = mission_object["scale"][0]
new_obj.scale.y = mission_object["scale"][1]
new_obj.scale.z = mission_object["scale"][2]
rotation_matrix = mathutils.Matrix(mission_object["rotation_matrix"])
new_obj.rotation_euler = rotation_matrix.to_euler()
new_obj.rotation_euler[0] = new_obj.rotation_euler[0] * (-1)
new_obj.rotation_euler[1] = new_obj.rotation_euler[1] * (-1)
new_obj.rotation_euler[2] = new_obj.rotation_euler[2] * (-1)
#set mission_object prop
new_obj["id"] = mission_object["id"]
new_obj["type"] = mission_object["type"]
new_obj["garbage"] = mission_object["garbage"]
new_obj["str"] = mission_object["str"]
new_obj["entry_no"] = mission_object["entry_no"]
new_obj["menu_entry_no"] = mission_object["menu_entry_no"]
bpy.context.collection.objects.link(new_obj)
with open('F:/mission_objects.json', "r") as file:
mission_objects_json_str = file.read()
print(mission_objects_json_str)
mission_objects = json.loads(mission_objects_json_str)
for mission_object_index, mission_object in enumerate(mission_objects):
handle_mission_object(mission_object_index, mission_object)
四.ai_mesh.obj
五.layer_ground_elevation.pfm
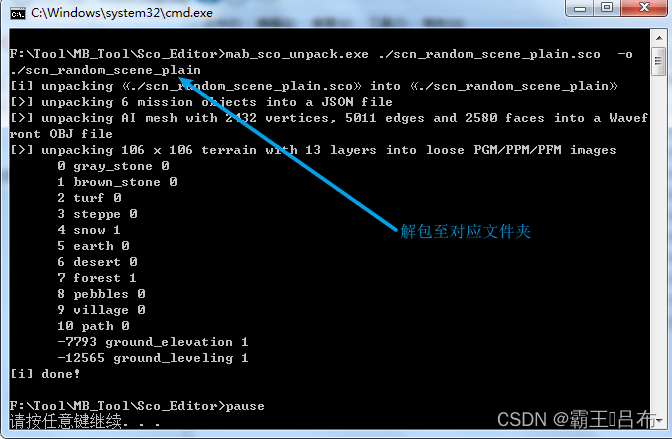
六.解包sco文件
将拷贝sco文件至工具目录,运行unpack.bat进行解包.
七.封包sco文件
修改解包文件夹下的文件,运行repack.bat重新打包生成sco文件.