摘要:为了减小交通事故概率、降低运营成本、提高运营效率,实现安全、环保的出行,自动驾驶
技术的发展已成为大势所趋,而搭配有L4 级自动驾驶系统的车辆是将车辆驾驶全部交给系统。据此,介绍了自动驾驶汽车的主流技术解决方案;分析了国内外L4 级自动驾驶汽车的已发布车型、所应用的技术以及相关法规等;研究国内L4 级自动驾驶系统发展所遇到的机遇与挑战。
关键词:L4 级;自动驾驶;现状;机遇;挑战
1 前言
相对于人,车往往是更安全的,原因在于人的情绪因素或疲劳感等会影响车辆驾驶的安全。经调查,交通事故的产生大多是人为因素,包含醉驾、疲劳驾驶、边开车边玩手机等。为了减小交通事故概率、降低运营成本、提高运营效率,实现安全、环保的出行,自动驾驶技术的发展如火如荼。自动驾驶技术最早出现在欧美和日本,美国汽车工程学会(SAE)根据系统对于车辆操控任务的把控程度,将自动驾驶技术分为L0~L5,L1~L3级系统主要起辅助功能;当系统达到L4 级,车辆驾驶全部交给系统,借助实时更新并且可靠的道路信息,可以实现自动取还车、自动巡航、自动避障等出行的真实场景。目前不少乘用车企已向消费者发布L4 级自动驾驶概念。本文中,笔者将对L4 级自动驾驶汽车的发展现状、在国内发展所遇到的机遇与挑战等进行介绍与分析。
2 发展现状
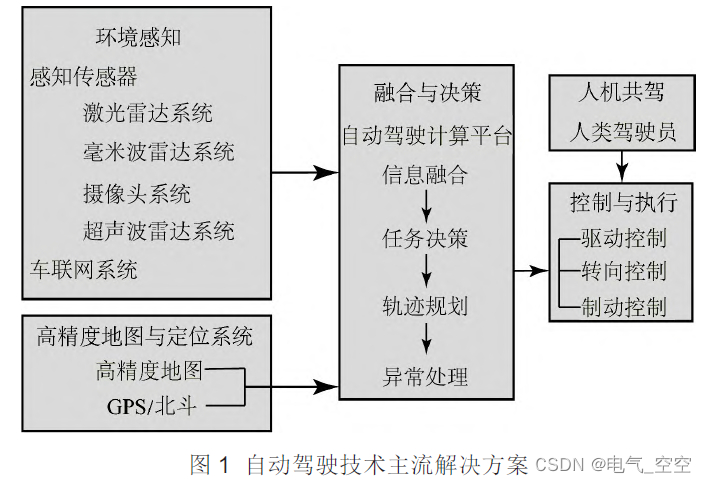
2.1 自动驾驶汽车主流技术方案
自动驾驶功能的实现,主要是依赖于环境感知传感器、自动驾驶计算平台、网联通信设施以及人机交互系统等,其主流技术解决方案如图1 所示。对于自动驾驶汽车来说,环境感知系统相当于其五官,自动驾驶计算平台则相当于其大脑,为了实现V2X 功能则需要网联通信设施,人机交互系统则是自动驾驶汽车的另一个重要的板块。
2.2 国外现状
戴姆勒卡车与旗下独立子公司Torc 一道开发配备关键冗余安全系统的SAE4 级(L4)自动驾驶卡车,这是业内首开卡车制造商和自动驾驶技术商合作关系的先河,双方已有车队每日在美国公开道路上开展安全有效的测试。这些卡车配备了先进的激光雷达(LiDAR)、雷达和摄像头技术,能够在灯控交叉道路、坡道和转向路口完成高级驾驶行为。目前经过密集的变道、复杂并线等典型驾驶场景测试,Torc 自动驾驶软件在高速公路上的安全导航能力已经得到验证。这对于实现“仓对仓”的货运场景不可或缺。如今,Torc 还与当地领先的物流企业合作建立Torc 自动驾驶咨询委员会,致力于将深刻的行业洞见整合至自动驾驶卡车开发进程,进一步融入实际运输应用场景。双方坚信将在2030 年内让自动驾驶卡车技术成为现实,并实现其商业化。为打造面向商用车型的L4 级自动驾驶技术,Apl⁃habet 旗下的Waymo 公司与菲亚特·克莱斯勒(FCA)基于FCA Pacifica