写在前面:
由于时间的不足与学习的碎片化,写博客变得有些奢侈。
但是对于记录学习(忘了以后能快速复习)的渴望一天天变得强烈。
既然如此
不如以天为单位,以时间为顺序,仅仅将博客当做一个知识学习的目录,记录笔者认为最通俗、最有帮助的资料,并尽量总结几句话指明本质,以便于日后搜索起来更加容易。
标题的结构如下:“类型”:“知识点”——“简短的解释”
部分内容由于保密协议无法上传。
点击此处进入学习日记的总目录
2024.03.15
- 三十一、UCOSIII:任务的挂起和恢复
- 1、实现任务的挂起和恢复
- 1. 定义任务的状态
- 2. 修改任务控制块TCB
- 3. 编写任务挂起和恢复函数
- - OSTaskSuspend()函数
- - OSTaskResume()函数
- 2、main()函数
- 3、实验现象
三十一、UCOSIII:任务的挂起和恢复
本章开始,我们让OS的任务支持挂起和恢复的功能,挂起就相当于暂停,暂停后任务从就绪列表中移除, 恢复即重新将任务插入就绪列表。
一个任务挂起多少次就要被恢复多少次才能重新运行。
1、实现任务的挂起和恢复
1. 定义任务的状态
在任务实现挂起和恢复的时候,要根据任务的状态来操作,任务的状态不同,操作也不同。
有关任务状态的宏定义在os.h中实现, 总共有9种状态
/* ---------- 任务的状态 -------*/
#define OS_TASK_STATE_BIT_DLY (OS_STATE)(0x01u)/* /-------- 挂起位 */
#define OS_TASK_STATE_BIT_PEND (OS_STATE)(0x02u)/* | /----- 等待位 */
#define OS_TASK_STATE_BIT_SUSPENDED (OS_STATE)(0x04u)/* | | /--- 延时/超时位 */
#define OS_TASK_STATE_RDY (OS_STATE)( 0u)/* 0 0 0 就绪 */
#define OS_TASK_STATE_DLY (OS_STATE)( 1u)/* 0 0 1 延时或者超时 */
#define OS_TASK_STATE_PEND (OS_STATE)( 2u)/* 0 1 0 等待 */
#define OS_TASK_STATE_PEND_TIMEOUT (OS_STATE)( 3u)/* 0 1 1 等待+超时*/
#define OS_TASK_STATE_SUSPENDED (OS_STATE)( 4u)/* 1 0 0 挂起 */
#define OS_TASK_STATE_DLY_SUSPENDED (OS_STATE)( 5u)/* 1 0 1 挂起 + 延时或者超时*/
#define OS_TASK_STATE_PEND_SUSPENDED (OS_STATE)( 6u)/* 1 1 0 挂起 + 等待 */
#define OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED (OS_STATE)( 7u)/* 1 1 1 挂起 + 等待 + 超时*/
#define OS_TASK_STATE_DEL (OS_STATE)(255u)
2. 修改任务控制块TCB
为了实现任务的挂起和恢复,需要先在任务控制中TCB中添加任务的状态TaskState和任务挂起计数器SusPendCtr这两个成员
struct os_tcb {
CPU_STK *StkPtr;
CPU_STK_SIZE StkSize;
/* 任务延时周期个数 */
OS_TICK TaskDelayTicks;
/* 任务优先级 */
OS_PRIO Prio;
/* 就绪列表双向链表的下一个指针 */
OS_TCB *NextPtr;
/* 就绪列表双向链表的前一个指针 */
OS_TCB *PrevPtr;
/*时基列表相关字段*/
OS_TCB *TickNextPtr;
OS_TCB *TickPrevPtr;
OS_TICK_SPOKE *TickSpokePtr;
OS_TICK TickCtrMatch;
OS_TICK TickRemain;
/* 时间片相关字段 */
OS_TICK TimeQuanta;
OS_TICK TimeQuantaCtr;
OS_STATE TaskState; //(1)
#if OS_CFG_TASK_SUSPEND_EN > 0u //(2)
/* 任务挂起函数OSTaskSuspend()计数器 */
OS_NESTING_CTR SuspendCtr; //(3)
#endif
};
- (1):TaskState用来表示任务的状态,在本章之前,任务出现了两种状态,一是任务刚刚创建好的时候, 处于就绪态,调用阻塞延时函数的时候处于延时态。本章要实现的是任务的挂起态,再往后的章节中还会有等待态,超时态, 删除态等。
- (2):任务挂起功能是可选的,通过宏OS_CFG_TASK_SUSPEND_EN来控制,该宏在os_cfg.h文件中定义。
- (3):任务挂起计数器,任务每被挂起一次,SuspendCtr递增一次,一个任务挂起多少次就要被恢复多少次才能重新运行。
3. 编写任务挂起和恢复函数
- OSTaskSuspend()函数
#if OS_CFG_TASK_SUSPEND_EN > 0u
void OSTaskSuspend (OS_TCB *p_tcb,
OS_ERR *p_err)
{
CPU_SR_ALLOC();
#if 0/* 屏蔽开始 */ //(1)
#ifdef OS_SAFETY_CRITICAL
/* 安全检查,OS_SAFETY_CRITICAL_EXCEPTION()函数需要用户自行编写 */
if (p_err == (OS_ERR *)0)
{
OS_SAFETY_CRITICAL_EXCEPTION();
return;
}
#endif
#if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u
/* 不能在ISR程序中调用该函数 */
if (OSIntNestingCtr > (OS_NESTING_CTR)0)
{
*p_err = OS_ERR_TASK_SUSPEND_ISR;
return;
}
#endif
/* 不能挂起空闲任务 */
if (p_tcb == &OSIdleTaskTCB)
{
*p_err = OS_ERR_TASK_SUSPEND_IDLE;
return;
}
#if OS_CFG_ISR_POST_DEFERRED_EN > 0u
/* 不能挂起中断处理任务 */
if (p_tcb == &OSIntQTaskTCB)
{
*p_err = OS_ERR_TASK_SUSPEND_INT_HANDLER;
return;
}
#endif
#endif/* 屏蔽结束 */ //(2)
CPU_CRITICAL_ENTER();
/* 是否挂起自己 */ //(3)
if (p_tcb == (OS_TCB *)0) {
p_tcb = OSTCBCurPtr;
}
if (p_tcb == OSTCBCurPtr) {
/* 如果调度器锁住则不能挂起自己 */
if (OSSchedLockNestingCtr > (OS_NESTING_CTR)0) {
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_SCHED_LOCKED;
return;
}
}
*p_err = OS_ERR_NONE;
/* 根据任务的状态来决定挂起的动作 */ //(4)
switch (p_tcb->TaskState)
{
case OS_TASK_STATE_RDY: //(5)
OS_CRITICAL_ENTER_CPU_CRITICAL_EXIT();
p_tcb->TaskState = OS_TASK_STATE_SUSPENDED;
p_tcb->SuspendCtr = (OS_NESTING_CTR)1;
OS_RdyListRemove(p_tcb);
OS_CRITICAL_EXIT_NO_SCHED();
break;
case OS_TASK_STATE_DLY: //(6)
p_tcb->TaskState = OS_TASK_STATE_DLY_SUSPENDED;
p_tcb->SuspendCtr = (OS_NESTING_CTR)1;
CPU_CRITICAL_EXIT();
break;
case OS_TASK_STATE_PEND: //(7)
p_tcb->TaskState = OS_TASK_STATE_PEND_SUSPENDED;
p_tcb->SuspendCtr = (OS_NESTING_CTR)1;
CPU_CRITICAL_EXIT();
break;
case OS_TASK_STATE_PEND_TIMEOUT: //(8)
p_tcb->TaskState = OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED;
p_tcb->SuspendCtr = (OS_NESTING_CTR)1;
CPU_CRITICAL_EXIT();
break;
case OS_TASK_STATE_SUSPENDED: //(9)
case OS_TASK_STATE_DLY_SUSPENDED:
case OS_TASK_STATE_PEND_SUSPENDED:
case OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED:
p_tcb->SuspendCtr++;
CPU_CRITICAL_EXIT();
break;
default: //(10)
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_STATE_INVALID;
return;
}
/* 任务切换 */
OSSched(); //(11)
}
#endif
- (1)和(2):这部分代码是为了程序的健壮性写的代码,即是加了各种判断, 避免用户的误操作。在μC/OS-III中,这段代码随处可见,但为了讲解方便,我们把这部分代码注释掉, 里面涉及的一些宏和函数我们均不实现,只需要了解即可,在后面的讲解中,要是出现这段代码, 我们直接删除掉,删除掉也不会影响核心功能。
- (3):如果任务挂起的是自己,则判断下调度器是否锁住,如果锁住则退出返回错误码,没有锁则继续往下执行。
- (4):根据任务的状态来决定挂起操作。
- (5):任务在就绪状态,则将任务的状态改为挂起态,挂起计数器置1,然后从就绪列表删除。
- (6):任务在延时状态,则将任务的状态改为延时加挂起态,挂起计数器置1,不用改变TCB的位置,即还是在延时的时基列表。
- (7):任务在等待状态,则将任务的状态改为等待加挂起态,挂起计数器置1,不用改变TCB的位置,即还是在等待列表等待。 等待列表暂时还没有实现,将会在后面的章节实现。
- (8):任务在等待加超时态, 则将任务的状态改为等待加超时加挂起态,挂起计数器置1,不用改变TCB的位置,即还在等待和时基这两个列表中。
- (9):只要有一个是挂起状态,则将挂起计数器加一操作,不用改变TCB的位置。
- (10):其他状态则无效,退出返回状态无效错误码。
- (11):任务切换。凡是涉及改变任务状态的地方,都需要进行任务切换。
- OSTaskResume()函数
OSTaskResume()函数用于恢复被挂起的函数,但是不能恢复自己,挂起倒是可以挂起自己
#if OS_CFG_TASK_SUSPEND_EN > 0u
void OSTaskResume (OS_TCB *p_tcb,
OS_ERR *p_err)
{
CPU_SR_ALLOC();
#if 0/* 屏蔽开始 */ //(1)
#ifdef OS_SAFETY_CRITICAL
/* 安全检查,OS_SAFETY_CRITICAL_EXCEPTION()函数需要用户自行编写 */
if (p_err == (OS_ERR *)0) {
OS_SAFETY_CRITICAL_EXCEPTION();
return;
}
#endif
#if OS_CFG_CALLED_FROM_ISR_CHK_EN > 0u
/* 不能在ISR程序中调用该函数 */
if (OSIntNestingCtr > (OS_NESTING_CTR)0) {
*p_err = OS_ERR_TASK_RESUME_ISR;
return;
}
#endif
CPU_CRITICAL_ENTER();
#if OS_CFG_ARG_CHK_EN > 0u
/* 不能自己恢复自己 */
if ((p_tcb == (OS_TCB *)0) ||
(p_tcb == OSTCBCurPtr)) {
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_RESUME_SELF;
return;
}
#endif
#endif/* 屏蔽结束 */ //(2)
*p_err = OS_ERR_NONE;
/* 根据任务的状态来决定挂起的动作 */
switch (p_tcb->TaskState) { //(3)
case OS_TASK_STATE_RDY: //(4)
case OS_TASK_STATE_DLY:
case OS_TASK_STATE_PEND:
case OS_TASK_STATE_PEND_TIMEOUT:
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_TASK_NOT_SUSPENDED;
break;
case OS_TASK_STATE_SUSPENDED: //(5)
OS_CRITICAL_ENTER_CPU_CRITICAL_EXIT();
p_tcb->SuspendCtr--;
if (p_tcb->SuspendCtr == (OS_NESTING_CTR)0) {
p_tcb->TaskState = OS_TASK_STATE_RDY;
OS_TaskRdy(p_tcb);
}
OS_CRITICAL_EXIT_NO_SCHED();
break;
case OS_TASK_STATE_DLY_SUSPENDED: //(6)
p_tcb->SuspendCtr--;
if (p_tcb->SuspendCtr == (OS_NESTING_CTR)0) {
p_tcb->TaskState = OS_TASK_STATE_DLY;
}
CPU_CRITICAL_EXIT();
break;
case OS_TASK_STATE_PEND_SUSPENDED: //(7)
p_tcb->SuspendCtr--;
if (p_tcb->SuspendCtr == (OS_NESTING_CTR)0) {
p_tcb->TaskState = OS_TASK_STATE_PEND;
}
CPU_CRITICAL_EXIT();
break;
case OS_TASK_STATE_PEND_TIMEOUT_SUSPENDED: //(8)
p_tcb->SuspendCtr--;
if (p_tcb->SuspendCtr == (OS_NESTING_CTR)0) {
p_tcb->TaskState = OS_TASK_STATE_PEND_TIMEOUT;
}
CPU_CRITICAL_EXIT();
break;
default: //(9)
CPU_CRITICAL_EXIT();
*p_err = OS_ERR_STATE_INVALID;
return;
}
/* 任务切换 */
OSSched(); //(10)
}
#endif
- (1)和(2):这部分代码是为了程序的健壮性写的代码,即是加了各种判断,避免用户的误操作。 在μC/OS-III中,这段代码随处可见,但为了讲解方便,我们把这部分代码注释掉,里面涉及的一些宏和函数我们均不实现, 只需要了解即可,在后面的讲解中,要是出现这段代码,我们直接删除掉,删除掉也不会影响核心功能。
- (3):根据任务的状态来决定恢复操作。
- (4):只要任务没有被挂起,则退出返回任务没有被挂起的错误码。
- (5):任务只在挂起态, 则递减挂起计数器SuspendCtr,如果SuspendCtr等于0,则将任务的状态改为就绪态,并让任务就绪。
- (6):任务在延时加挂起态, 则递减挂起计数器SuspendCtr,如果SuspendCtr等于0,则将任务的状态改为延时态。
- (7):任务在等待加挂起态, 则递减挂起计数器SuspendCtr,如果SuspendCtr等于0,则将任务的状态改为等待态。
- (8):任务在等待加超时加挂起态, 则递减挂起计数器SuspendCtr,如果SuspendCtr等于0,则将任务的状态改为等待加超时态
- (9):其他状态则无效,退出返回状态无效错误码。
- (10):任务切换。凡是涉及改变任务状态的地方,都需要进行任务切换。
2、main()函数
这里,我们创建任务1、2和3,其中任务的优先级为1,任务2的优先级为2,任务3的优先级为3。
任务1将自身的flag每翻转一次后均将自己挂起, 任务2在经过两个时钟周期后将任务1恢复,任务3每隔一个时钟周期翻转一次。
int main(void)
{
OS_ERR err;
/* CPU初始化:1、初始化时间戳 */
CPU_Init();
/* 关闭中断 */
CPU_IntDis();
/* 配置SysTick 10ms 中断一次 */
OS_CPU_SysTickInit (10);
/* 初始化相关的全局变量 */
OSInit(&err);
/* 创建任务 */
OSTaskCreate( (OS_TCB *)&Task1TCB,
(OS_TASK_PTR )Task1,
(void *)0,
(OS_PRIO )1,
(CPU_STK *)&Task1Stk[0],
(CPU_STK_SIZE )TASK1_STK_SIZE,
(OS_TICK )0,
(OS_ERR *)&err );
OSTaskCreate( (OS_TCB *)&Task2TCB,
(OS_TASK_PTR )Task2,
(void *)0,
(OS_PRIO )2,
(CPU_STK *)&Task2Stk[0],
(CPU_STK_SIZE )TASK2_STK_SIZE,
(OS_TICK )0,
(OS_ERR *)&err );
OSTaskCreate( (OS_TCB *)&Task3TCB,
(OS_TASK_PTR )Task3,
(void *)0,
(OS_PRIO )3,
(CPU_STK *)&Task3Stk[0],
(CPU_STK_SIZE )TASK3_STK_SIZE,
(OS_TICK )0,
(OS_ERR *)&err );
/* 启动OS,将不再返回 */
OSStart(&err);
}
void Task1( void *p_arg )
{
OS_ERR err;
for ( ;; ) {
flag1 = 1;
OSTaskSuspend(&Task1TCB,&err);
flag1 = 0;
OSTaskSuspend(&Task1TCB,&err);
}
}
void Task2( void *p_arg )
{
OS_ERR err;
for ( ;; ) {
flag2 = 1;
OSTimeDly(1);
//OSTaskResume(&Task1TCB,&err);
flag2 = 0;
OSTimeDly(1);;
OSTaskResume(&Task1TCB,&err);
}
}
void Task3( void *p_arg )
{
for ( ;; ) {
flag3 = 1;
OSTimeDly(1);
flag3 = 0;
OSTimeDly(1);
}
}
3、实验现象
进入软件调试,单击全速运行按钮就可看到实验波形,具体见图
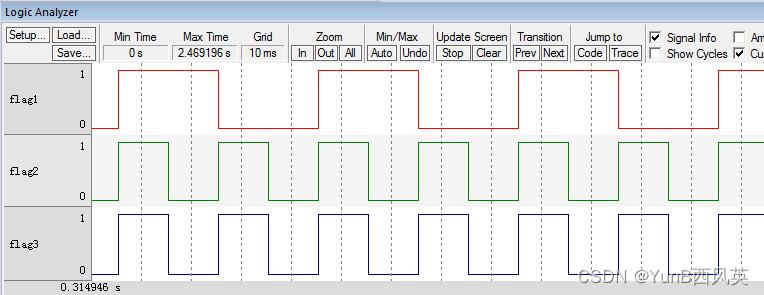
可以看到任务2和任务3的波形图是一样的, 任务1的波形周期是任务2的两倍,与代码实现相符。如果想实现其他效果可自行修改代码实现。
其中,任务二与任务三是靠任务阻塞来完成延时的,只与系统时钟相关。
而任务一每次翻转都会将自己挂起,必须靠任务二将自己恢复才能继续运行。





![[NOIP1998 提高组] 拼数](https://img-blog.csdnimg.cn/direct/667a8d08e2df436982d3986eec37d18c.png#pic_center)