#include "reg52.h"
sfr AUXR = 0x8e; //定义辅助寄存器
sbit S5 = P3^2; //定义按键S5引脚
sbit S4 = P3^3; //定义按键S4引脚
unsigned char count = 0; //定义中断计数器
unsigned char t_h = 0; //定义运行时间的变量
unsigned char t_m = 0;
unsigned char t_s = 0;
unsigned char command = 0;
unsigned char stat_led = 0xff; //定义LED灯开关状态
//-----数码管段码----
unsigned char code SMG_NoDot[18]={0xc0,0xf9,
0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90,
0x88,0x80,0xc6,0xc0,0x86,0x8e,0xbf,0x7f};
/*==================普通延时函数======================
功能:进行非精确的延时
参数:t--
=======================================================*/
void Delay(unsigned int t)
{
while(t--);
while(t--);
}
/*================数码管延时函数====================
功能:数码管显示的延时
参数:t--
=======================================================*/
void DelaySMG(unsigned int t)
{
while(t--);
}
/*=================锁存器选择函数======================
功能:选择打通一个锁存器-----HC138
=======================================================*/
void SelectHC573(unsigned channel)
{
switch(channel)
{
case 4:
P2 = (P2 & 0x1f) | 0x80; //Y4,选择LED控制
break;
case 5:
P2 = (P2 & 0x1f) | 0xa0; //Y5,选择蜂鸣器和继电器控制
break;
case 6:
P2 = (P2 & 0x1f) | 0xc0; //Y6,选择数码管位置
break;
case 7:
P2 = (P2 & 0x1f) | 0xe0; //Y7,选择数码管段码
break;
case 0:
P2 = (P2 & 0x1f) | 0x00; //在完成后关闭所有锁存器
break;
}
}
/*=================单个数码管显示====================
功能:在指定位置上显示
参数:无
=======================================================*/
void DisplaySMG_Bit(unsigned char value, unsigned char pos)
{
P0 = 0xff; //全部熄灭
SelectHC573(6);
P0 = 0x01 << pos; //数码管的位置
SelectHC573(7);
P0 = value; //数码管的数字
}
/*===============系统运行时间===================
功能: 数码管显示运行时间
参数: value pos
=======================================================*/
void DisplayTime()
{
DisplaySMG_Bit(SMG_NoDot[t_s%10],7); //秒
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[t_s/10],6);
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[16],5); //-
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[t_m%10],4); //分
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[t_m/10],3);
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[16],2); //-
DisplaySMG_Bit(SMG_NoDot[t_h%10],1); //时
DelaySMG(500);
DisplaySMG_Bit(SMG_NoDot[t_h/10],0);
DelaySMG(500);
}
/*================定时器初始化====================
功能: 将定时器设置为16位模式,计数位50ms
参数:无
=======================================================*/
void InitTimer0()
{
TMOD = 0x21; //T0和T1工作模式一起赋值
TH0 = (65535 - 50000) / 256;
TL0 = (65535 - 50000) % 256;
ET0 = 1; //使能定时器 T0
EA = 1; //使能中断
TR0 = 1; //启动定时器
}
/*===============中断服务函数===================
功能:进行系统时间计时
参数:无
=======================================================*/
void ServiceTimer0() interrupt 1
{
TH0 = (65535 - 50000) / 256; //计数 0,05s
TL0 = (65535 - 50000) % 256;
count++; //进行时间计算
if(count == 20)
{
count = 0;
t_s++;
}
if(t_s == 60)
{
t_s = 0;
t_m++;
if(t_m == 60)
{
t_m = 0;
t_h++;
}
}
}
/*=================串口初始化函数========================
功能:将串口设置为模式1,波特率9600,允许接收
参数
=======================================================*/
void InitUart()
{
TMOD = 0x21; //T0与T1一起赋值
TH1 = 0xfd; //设置9600波特率
TL1 = 0xfd;
TR1 = 1; // 启动定时器1
SCON = 0x50; //8位UART
AUXR = 0x00; //辅助寄存器
ES = 1; //使能串口中断
EA = 1; //使能总中断
}
/*=================串口中断服务函数====================
功能:接收上位机所发送的字符
=======================================================*/
void ServiceUart() interrupt 4
{
if(RI == 1)
{
command = SBUF; //½«½ÓÊÕµ½µÄÊý¾Ý±£´æµ½command±äÁ¿
RI = 0; //½«½ÓÊÕÍê³É±êÖ¾RIÇå0
}
}
/*=================串口服务函数====================
功能:接收上位机发送的数据并保持在command里
参数:无
=======================================================*/
void SendByte(unsigned char dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
void SendString(unsigned char *str)
{
while(*str != '\0')
{
SendByte(*str++);
}
}
/*===============串口信息接收执行函数==================
功能:接收上位机消息,进行灯光控制
参数:无
=======================================================*/
void ExecuteCommand()
{
if(command != 0x00) //接收的消息不为空
{
switch(command & 0xf0) //将命令类型取出
{
case 0xa0: //远程控制灯光
SelectHC573(4);
stat_led = (stat_led | 0x0f) & (~command | 0xf0);
P0 = stat_led;
SelectHC573(0);
command = 0x00;
break;
case 0xb0: //读取系统运行时间
SendByte((t_h / 10 << 4) | (t_h % 10));
SendByte((t_m / 10 << 4) | (t_m % 10));
SendByte((t_s / 10 << 4) | (t_s % 10));
command = 0x00;
break;
}
}
}
/*=================按键扫描控制====================
功能:按键控制灯光
参数:无
=======================================================*/
void ScanKeys()
{
if(S5 == 0) // 如果按键按下
{
DisplayTime(); // 显示数码管——持续显示
Delay(500);
if(S5 == 0) // 判断是否再次按下
{
while(S5 == 0) //判断按键是否一直按下
{
DisplayTime();
}
SelectHC573(4); //锁存器选择灯光
stat_led = (stat_led | 0x40) & (~stat_led | 0xbf);
P0 = stat_led; //灯光全部熄灭
SelectHC573(0);
}
}
if(S4 == 0)
{
DisplayTime();
if(S4 == 0)
{
while(S4 == 0)
{
DisplayTime();
}
SelectHC573(4);
stat_led = (stat_led | 0x80) & (~stat_led | 0x7f);
P0 = stat_led;
SelectHC573(0);
}
}
}
/*==============检查灯光=======================
功能:依次点亮,然后依次熄灭
=======================================================*/
void CheckLED()
{
char i;
SelectHC573(4);
for(i = 0; i < 9; i++)
{
stat_led = 0xfe << i; // 灯光闪烁
P0 = stat_led;
Delay(60000);
}
for(i = 0; i < 9; i++)
{
stat_led = ~(0xfe << i); // 灯依次熄灭
P0 = stat_led;
Delay(60000);
}
SelectHC573(0);
}
/*================检查数码管==================
功能:点亮全部数码管然后依次全部熄灭
参数:无
=======================================================*/
void CheckSMG()
{
char i;
SelectHC573(7);
P0 = 0x00;
for(i = 0; i < 9; i++)
{
SelectHC573(6);
P0 = ~(0xfe << i); //点亮数码管
Delay(60000);
}
for(i = 0; i < 9; i++)
{
SelectHC573(6);
P0 = 0xfe << i; //熄灭数码管
Delay(60000);
}
SelectHC573(0);
}
/*==================初始化函数======================
功能:关闭无关的设备
=======================================================*/
void InitSystem()
{
SelectHC573(5);
P0 = 0x00;
SelectHC573(4);
P0 = stat_led;
SelectHC573(0);
}
/*==================主函数===========================
设备初始化,关闭无关设备,最后关闭
进行灯光与数码管检查
定时器初始化
UART通信初始化
=======================================================*/
void main()
{
InitSystem();
CheckLED();
CheckSMG();
InitTimer0();
InitUart();
while(1)
{
ExecuteCommand(); //串口进行灯光控制
DisplayTime(); //数码管显示
ScanKeys(); //按键控制灯光
}
}上面是 基本技能综合实训的代码,做的是一个时钟系统并能靠按键与串口进行灯光控制,其中包括大部分内容的初始化,接下来我们来对里面的内容进行一一介绍
sbit HC138_A = P2^5;
sbit HC138_B = P2^6;
sbit HC138_C = P2^7;
void Init74HC138(unsigned char n)
{
switch(n)
{
case 4:
HC138_A = 0;
HC138_B = 0;
HC138_C = 1;
break;
case 5:
HC138_A = 1;
HC138_B = 0;
HC138_C = 1;
break;
case 6:
HC138_A = 0;
HC138_B = 1;
HC138_C = 1;
break;
case 7:
HC138_A = 1;
HC138_B = 1;
HC138_C = 1;
break;
case 8:
HC138_A = 0;
HC138_B = 0;
HC138_C = 0;
break;
}
}1. LED基本控制
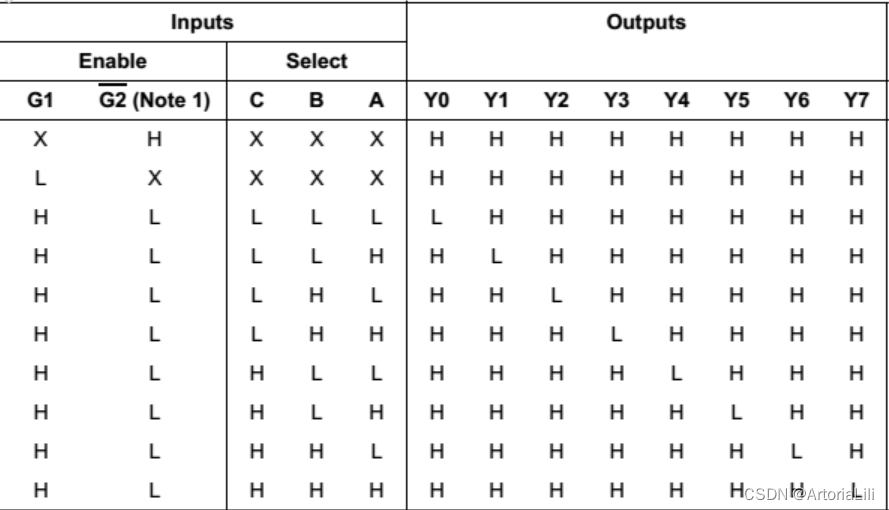
74HC138:三八译码器
这个芯片实现的功能就是用3个输入引脚,实现8个输出引脚,而且这个八个输出引脚中只要一个低电平,我们就记下面的表,进行下面的译码器的口的选择(H = 1, X = 0)
74HC573:锁存器
锁存器就是能够把输出的数据保存住,不会受到输入变化的影响,设置的时候只要的573和138选择一个即可。573锁存器有20个引脚,D1~D8是数据输入端,Q1~Q8是数据输出端,LE为锁存控制端。当锁存使能端LE为高时,573的锁存对于数据是透明的(也就是说输出同步)。当锁存使能变低时,符合建立时间和保持时间的数据会被锁存。
void SelectHC573(unsigned channel)
{
switch(channel)
{
case 4:
P2 = (P2 & 0x1f) | 0x80; //Y4,选择LED控制
break;
case 5:
P2 = (P2 & 0x1f) | 0xa0; //Y5,选择蜂鸣器和继电器控制
break;
case 6:
P2 = (P2 & 0x1f) | 0xc0; //Y6,选择数码管位置
break;
case 7:
P2 = (P2 & 0x1f) | 0xe0; //Y7,选择数码管段码
break;
case 0:
P2 = (P2 & 0x1f) | 0x00; //在完成后关闭所有锁存器
break;
}
}74HC02:或非门
单片机的WR引脚或者GND和译码器的Y4引脚作为74HC02的输入。可以通过J13的跳帽选择是WR还是GND作为74HC02的输入。如果译码器的Y4输出低电平,那么74HC02的输出Y4C将为高电平,而该引脚接到74HC573锁存器的LE引脚,这时候锁存器处于数据联通的开放状态,也就是单片机可以控制LED灯。如果单片机不向外设输出数据,或者译码器的Y4没有输出低电平的话,则74HC573处于锁存状态,即单片机不能控制LED灯
2. 数码管
在明确数码管类型之后,就可以确定段码数组了,也就是显示内容所对应的值
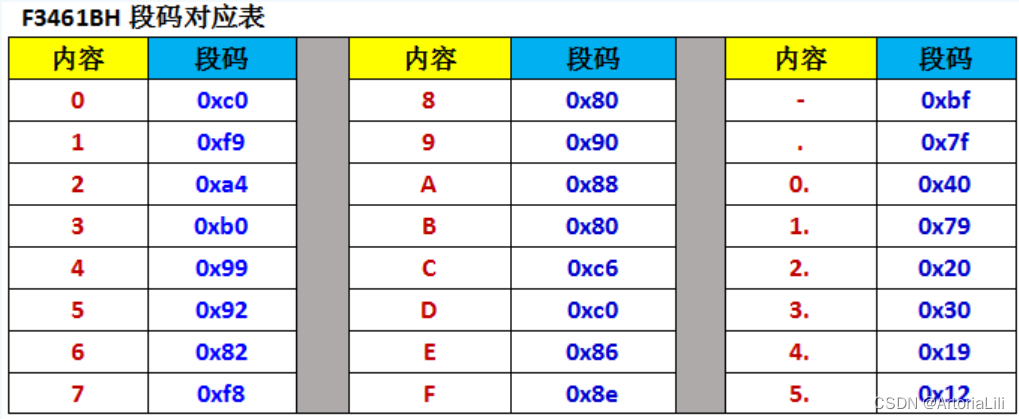
unsigned char code SMG_Duanma[18] =
{0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,
0x80,0x90,0x88,0x80,0xc6,0xc0,0x86,0x8e,
0xbf,0x7f};void Delay(unsigned int time)
{
while(time--);
while(time--);
}/*=================单个数码管显示====================
功能:在指定位置上显示
参数:无
=======================================================*/
void DisplaySMG_Bit(unsigned char value, unsigned char pos)
{
P0 = 0xff; //全部熄灭
SelectHC573(6);
P0 = 0x01 << pos; //数码管的位置
SelectHC573(7);
P0 = value; //数码管的数字
}3- 独立按键
一般情况下,独立按键有两个引脚,其中一个通过上拉电阻接到单片机的I/O端口,另外一端接地。也就是说,平时按键没有动作的时候,输出的是高电平,如果有按下动作发生,则输出的是低电平。那么,我们在程序设计的时候,只要扫描跟按键引脚相连的I/O端口,如果发现有低电平产生,则判定该按键处于按下状态。有些时候,电路或者外围有电磁干扰,也会使单片机的I/O端口产生低电平,这种干扰信号会让单片机误认为是按键动作。所以,在扫描按键的时候应该做去抖动处理,把干扰信号过滤掉,从而获得准确的按键状态信号。
/*=================按键扫描控制====================
功能:按键控制灯光
参数:无
=======================================================*/
void ScanKeys()
{
if(S5 == 0) // 如果按键按下
{
DisplayTime(); // 显示数码管——持续显示
Delay(500);
if(S5 == 0) // 判断是否再次按下
{
while(S5 == 0) //判断按键是否一直按下
{
DisplayTime();
}
SelectHC573(4); //锁存器选择灯光
stat_led = (stat_led | 0x40) & (~stat_led | 0xbf);
P0 = stat_led; //灯光全部熄灭
SelectHC573(0);
}
}
if(S4 == 0)
{
DisplayTime();
if(S4 == 0)
{
while(S4 == 0)
{
DisplayTime();
}
SelectHC573(4);
stat_led = (stat_led | 0x80) & (~stat_led | 0x7f);
P0 = stat_led;
SelectHC573(0);
}
}
}4- 矩阵按键扫描
与独立按键不同的是,按键的两个引脚都分别连接的单片机的I/O端口,一个作为行信号,另外一个作为列信号。我们以4X4的矩阵键盘为例,试着探讨其工作方式和扫描思路。
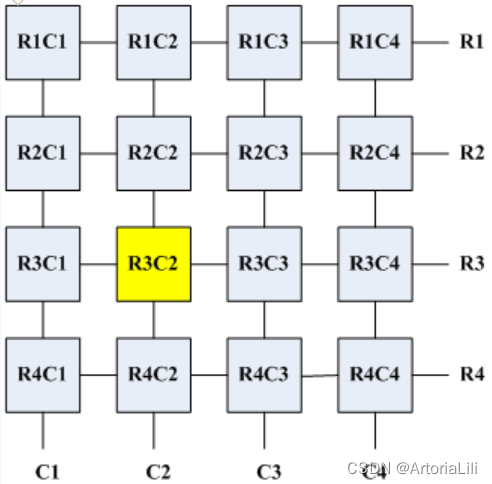
在上面的矩阵键盘中,要识别出黄色按键的按下状态,应该怎么做呢?
对与矩阵键盘,我们只能逐行扫描,然后读取列的状态信号。 如果R3行输出低电平,那么黄色按键如果有按下动作的话,那读取C2列信号也应该为低电平,而该行上其他没有按下动作的按键的列信号则为高电平。所以我们就可以查到下面的函数
<1> R1输出低电平,R2、R3、R4输出高电平,逐个读取判断列信号,如果都为高电平则R1行上没有按键按下。
<2> R2输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
<3> R3输出低电平,R1、R2、R4输出高电平,发现C2列信号为低电平,那么可以判断得R3行的C2列的按键有按下动作。
<4> R4输出低电平,R1、R3、R4输出高电平,逐个读取判断列信号。
void ScanKeys()
{
keyNum = 16;
R1 = 0;
R2 = R3 = R4 = 1;
C1 = C2 = C3 = C4 = 1;
if(C1 == 0)
{
while(C1 == 0);
keyNum = 0;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C2 == 0)
{
while(C2 == 0);
keyNum = 1;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C3 == 0)
{
while(C3 == 0);
keyNum = 2;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C4 == 0)
{
while(C4 == 0);
keyNum = 3;
ShowKeyNum(SMG_NoDot[keyNum]);
}
R2 = 0;
R1 = R3 = R4 = 1;
C1 = C2 = C3 = C4 = 1;
if(C1 == 0)
{
while(C1 == 0);
keyNum = 4;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C2 == 0)
{
while(C2 == 0);
keyNum = 5;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C3 == 0)
{
while(C3 == 0);
keyNum = 6;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C4 == 0)
{
while(C4 == 0);
keyNum = 7;
ShowKeyNum(SMG_NoDot[keyNum]);
}
R3 = 0;
R2 = R1 = R4 = 1;
C1 = C2 = C3 = C4 = 1;
if(C1 == 0)
{
while(C1 == 0);
keyNum = 8;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C2 == 0)
{
while(C2 == 0);
keyNum = 9;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C3 == 0)
{
while(C3 == 0);
keyNum = 10;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C4 == 0)
{
while(C4 == 0);
keyNum = 11;
ShowKeyNum(SMG_NoDot[keyNum]);
}
R4 = 0;
R2 = R3 = R1 = 1;
C1 = C2 = C3 = C4 = 1;
if(C1 == 0)
{
while(C1 == 0);
keyNum = 12;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C2 == 0)
{
while(C2 == 0);
keyNum = 13;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C3 == 0)
{
while(C3 == 0);
keyNum = 14;
ShowKeyNum(SMG_NoDot[keyNum]);
}
else if(C4 == 0)
{
while(C4 == 0);
keyNum = 15;
ShowKeyNum(SMG_NoDot[keyNum]);
}
}6- 中断系统
一般来说,51单片机有5个中断源(忽略定时/计数器2),分2个优先级,这个5个中断源按照自然优先级从高到低依次为:
外部中断0:INT0
定时/计数器0:TF0
外部中断1:INT1
定时/计数器1:TF1
串口中断:RI/TI
每个中断源都对应着一个固定的入口地址,也就是中断向量,它们依次是:
0 0x0003: INT0
1 0x000B: TF0
2 0x0013: INT1
3 0x001B: TF1
4 0x0023: RI/TI
中断相关的寄存器有4个,每个寄存器都是可以位寻址的,这该编程带来了方便。 其中2个为控制寄存器:IE寄存器与IP寄存器:
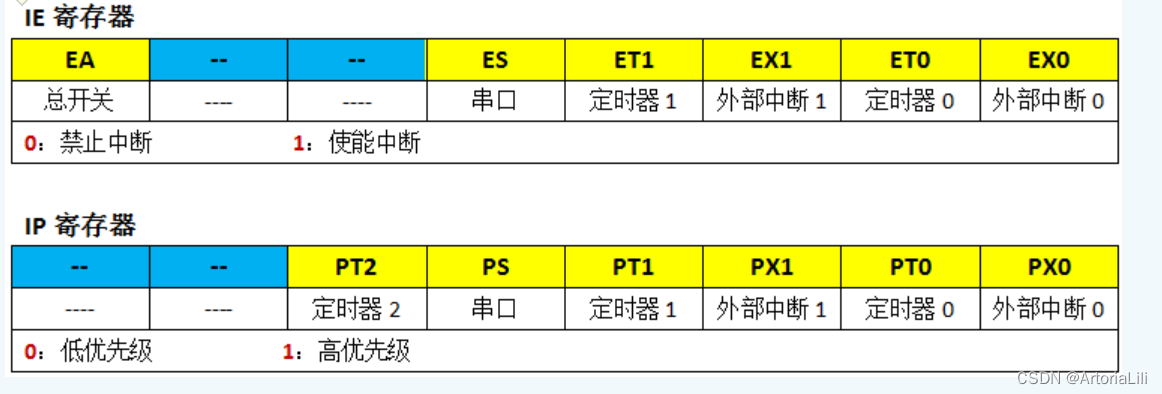
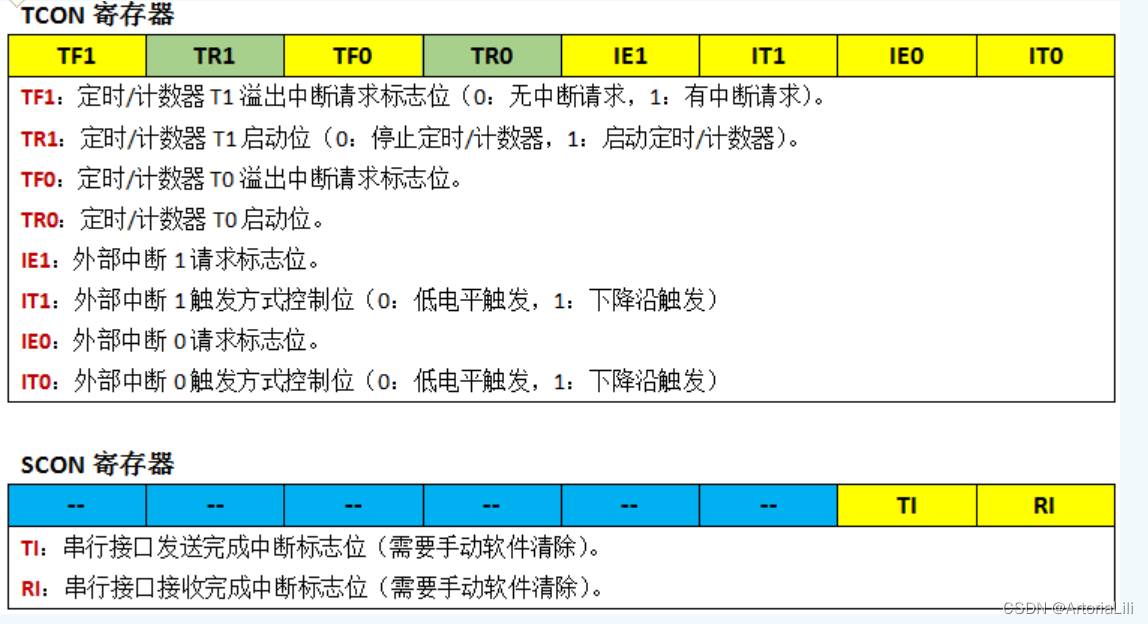
另外2个为中断请求标志:TCON寄存器与SCON寄存器:
一般情况下,中断的处理函数有两个,其一为中断初始化函数,其二为中断服务函数。中断服务函数我们需要在后面写上 interrupt 进行说明
我们的中断需要配合定时器和UART串口通信进行使用,我们先来进行定时器的说明.
7- 定时/计数器
是一种能够对内部时钟信号或外部输入信号进行计数,当计数值达到设定要求时,向CPU提出中断处理请求,从而实现定时或者计数功能的外设。定时/计数器的最基本工作原理是进行计数。作为定时器时,计数信号的来源选择周期性的内部时钟脉冲;用作计数器时,计数信号的来源选择非周期性的外部输入信号。
51单片机有两个定时/计数器T0和T1,为16位加法计数器,由低8位TLx和高8位THx两个寄存器组成,最大计数值为65535个计数脉冲。
<1> 系统时钟振荡器输出的12分频。
<2> T0或T1引脚输入的外部脉冲信号。
每接收到一个计数脉冲,计数器就会加1,当计数值累计至全为1时(8位255,13位8191,16位65535),再输入一个计数脉冲,计数器便会溢出回零,并且计数器的溢出是TCON寄存器的TF0或TF1位置1,同时向内核提出中断请求。如果定时/计数器工作于定时模式,则表示间隔定时时间到,如果工作与计数模式,则表示计数值已满。
与定时/计数器相关的寄存器除了计数初值寄存器THx和TLx之外,就是TMOD寄存器和TCON寄存器。
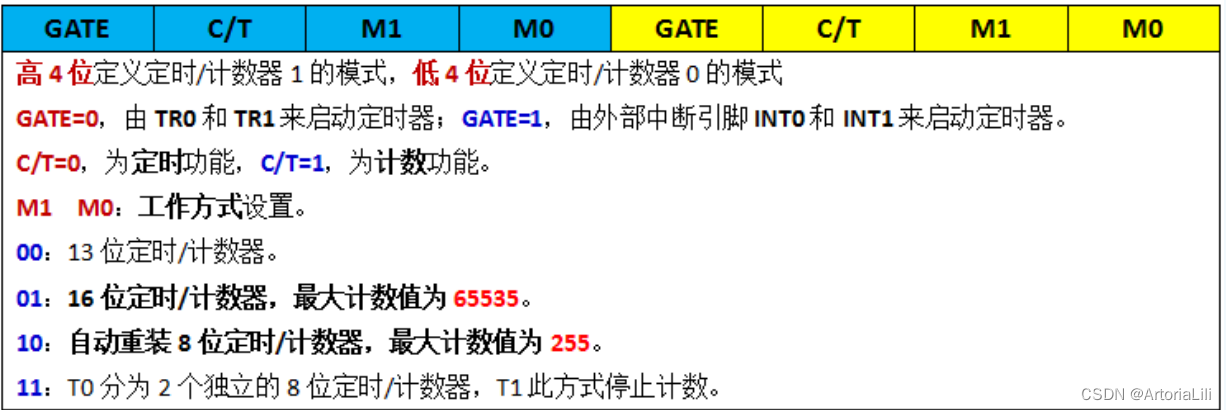
(1)TMOD 模式控制寄存器
(2) TCON中断标志寄存器
中断初始化的配置:
<1> 配置工作模式,即对TMOD寄存器编程。
<2> 计算技术初值,即对THx和TLx寄存器进行赋值。
<3> 使能定时/计数器中断,即ET0或ET1置1。
<4> 打开总中断,即EA =1。
<5> 启动定时器,即TR0或TR1置1。
中断服务函数:
<1> 如果不是自动重装模式,需要对THx和TLx重新赋值。
<2> 进行间隔定时到达的逻辑处理(越少越好)
/*================定时器初始化====================
功能: 将定时器设置为16位模式,计数位50ms
参数:无
=======================================================*/
void InitTimer0()
{
TMOD = 0x21; //T0和T1工作模式一起赋值
TH0 = (65535 - 50000) / 256;
TL0 = (65535 - 50000) % 256;
ET0 = 1; //使能定时器 T0
EA = 1; //使能中断
TR0 = 1; //启动定时器
}
/*===============中断服务函数===================
功能:进行系统时间计时
参数:无
=======================================================*/
void ServiceTimer0() interrupt 1
{
TH0 = (65535 - 50000) / 256; //计数 0,05s
TL0 = (65535 - 50000) % 256;
count++; //进行时间计算
if(count == 20)
{
count = 0;
t_s++;
}
if(t_s == 60)
{
t_s = 0;
t_m++;
if(t_m == 60)
{
t_m = 0;
t_h++;
}
}
}
8- 串口通信
<1> 串行通信是指数据一位接一位地顺序发送或接收。
<2> 串行通信有SPI、IIC、UART等多种,最常见最通用的是指UART,无特殊说明,本文指的就是UART。
<3> 串行通信的制式有:单工、半双工、全双工三种。
<4> 计算机的串行通信接口是RS-232的标准接口,而单片机的UART接口则是TTL电平,两者的电气规范不一致,所以要完成两者之间的数据通信,就需要借助接口芯片在两者之间进行电平转换,常用的有MAX232芯片。
<5> 波特率:每秒钟传输的位数,9600波特率就是指每秒钟传输9600位。
对于传统的51单片机,与串口相关的寄存器有:
TH1和TL1:设置波特率参数。
TMOD:设置定时器1的工作模式。
SBUF:串行通信数据的发送和接收缓冲器。
SCON:串行接口控制寄存器。

/*=================串口初始化函数========================
功能:将串口设置为模式1,波特率9600,允许接收
参数
=======================================================*/
void InitUart()
{
TMOD = 0x21; //T0与T1一起赋值
TH1 = 0xfd; //设置9600波特率
TL1 = 0xfd;
TR1 = 1; // 启动定时器1
SCON = 0x50; //8位UART
AUXR = 0x00; //辅助寄存器
ES = 1; //使能串口中断
EA = 1; //使能总中断
}
/*=================串口中断服务函数====================
功能:接收上位机所发送的字符
=======================================================*/
void ServiceUart() interrupt 4
{
if(RI == 1)
{
command = SBUF; //½«½ÓÊÕµ½µÄÊý¾Ý±£´æµ½command±äÁ¿
RI = 0; //½«½ÓÊÕÍê³É±êÖ¾RIÇå0
}
}
/*=================串口服务函数====================
功能:接收上位机发送的数据并保持在command里
参数:无
=======================================================*/
void SendByte(unsigned char dat)
{
SBUF = dat;
while(TI == 0);
TI = 0;
}
void SendString(unsigned char *str)
{
while(*str != '\0')
{
SendByte(*str++);
}
}




![[2023] NAND闪存及控制器的市场趋势](https://img-blog.csdnimg.cn/img_convert/74451631d2ff5c81ba79ba8d4f300e41.jpeg)