1、
基本矩阵
1.1、
极几何
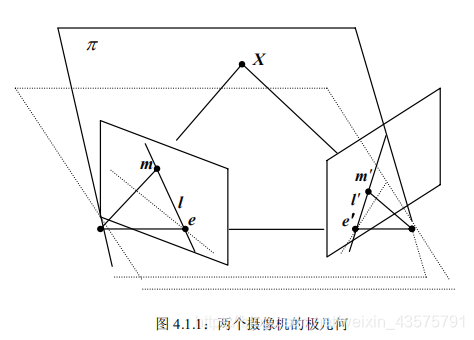
极平面
(Epipolar Plane)
通过两个摄像机光心的平面称为极平面。两个摄像机光心的连线称为基线,任意两张极平面均
相交于基线,所以极平面的全体构成共基线的平面束。
极线
(Epipolar Line)
极平面与摄像机像平面的交线称为极线。同一张极平面
π
与两个摄像机像平面的交线
l
,
l′ 称为一对极线对应。极平面
π 上任一点
X 在第一个摄像机像平面上的投影
m 必位于极线
l 上,即
m ∈
l
极点
(Epipolar Point)
基线与像平面的交点称为极点。
m
,
m′ :是空间点 X 分别在两个摄像机下的投影。
m
↔
m′:点对应(Point Correspondence)
极几何约束
令
m
↔
m
′
是一个点对应,则
m
′
必位于
m 对应的极线
 上,
m
必位于 m′对应的极线
上,
m
必位于 m′对应的极线
 上,即
上,即

极几何约束与埸景的几何结构无关,它是两幅图像间的固有射影性质。
1.2、
基本矩阵
极几何所描述的图像点与其极线的对应关系,可以用所谓的基本矩阵来刻划。基本矩阵是极几何的代数表示
P
,
P
′ :
两个摄像机矩阵
I
,
I′ :两个摄像机的像平面
基本矩阵F描述了图像点
m 与其对应极线
间的对应关系
极线对应
纯平移运动下的基本矩阵
纯平移运动
(
I
,
t ) 下两个摄像机间的基本矩阵为

当摄像机沿 x 轴作纯平移时,两幅图像的极点
 ,因此基本矩阵必为
,因此基本矩阵必为
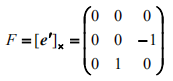
此时,对任意一点对应
 均有 v
=
v
′ 。这说明两幅图像上的极线都是相互平行的,且对应极线为同一条水平线。
均有 v
=
v
′ 。这说明两幅图像上的极线都是相互平行的,且对应极线为同一条水平线。