写在前面:
由于时间的不足与学习的碎片化,写博客变得有些奢侈。
但是对于记录学习(忘了以后能快速复习)的渴望一天天变得强烈。
既然如此
不如以天为单位,以时间为顺序,仅仅将博客当做一个知识学习的目录,记录笔者认为最通俗、最有帮助的资料,并尽量总结几句话指明本质,以便于日后搜索起来更加容易。
标题的结构如下:“类型”:“知识点”——“简短的解释”
部分内容由于保密协议无法上传。
点击此处进入学习日记的总目录
2024.03.11
- 二十七、UCOSIII:使用优先级的流程
- 1、定义函数
- 2、创建任务,并设置优先级
- 3、把任务插入优先级列表
- 4、把任务插入就绪列表
- 5、获得当前最高优先级
- 6、调用最高优先级任务
二十七、UCOSIII:使用优先级的流程
1、定义函数
假设我们要定义一个任务Task1,在app.c中编写代码
void Task1( void *p_arg )
{
for ( ;; ) {
flag1 = 1;
OSTimeDly(2);
flag1 = 0;
OSTimeDly(2);
}
}
2、创建任务,并设置优先级
在程序运行之前,使用OSTaskCreate()函数创建任务 并 设置优先级prio。
/* 创建任务 */
OSTaskCreate( (OS_TCB*)&Task1TCB, //在app.c中定义的OS_TCB类型的全局变量
(OS_TASK_PTR )Task1, //任务函数名,类型为OS_TASK_PTR,原型声明在os.h中
(void *)0, //任务形参,用于传递任务参数
(OS_PRIO)1, //优先级
(CPU_STK*)&Task1Stk[0], //指向任务栈的起始地址
(CPU_STK_SIZE) TASK1_STK_SIZE, //任务栈的大小
(OS_ERR *)&err ); //存错误码
OSTaskCreate()声明如下:
void OSTaskCreate (OS_TCB *p_tcb,
OS_TASK_PTR p_task,
void *p_arg,
OS_PRIO prio,
CPU_STK *p_stk_base,
CPU_STK_SIZE stk_size,
OS_ERR *p_err)
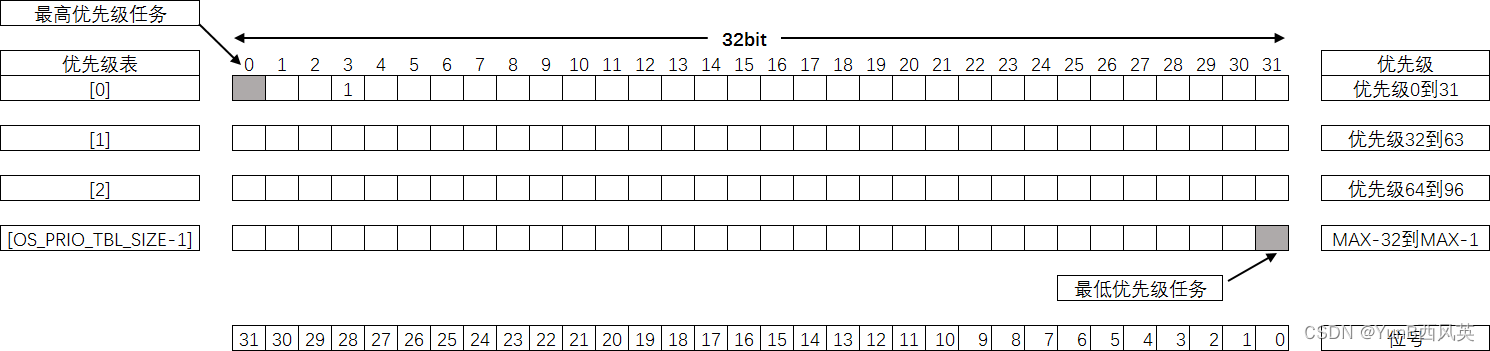
3、把任务插入优先级列表
利用OS_PrioInsert()函数设置优先级表OSPrioTbl中相应的位,代表这个任务已经开始排号了
void OS_PrioInsert (OS_PRIO prio)
OSPrioTbl优先级表如下:
4、把任务插入就绪列表
就绪列表不是准备运行的列表,可以理解为一个任务的暂存地。
就绪列表OSRdyList[]的大小由优先级列表确定(其实优先级表 和 就绪列表 成员数量都是由同一个宏OS_CFG_PRIO_MAX来定义的),支持多少个优先级, OSRdyList[]就有多少个成员。
使用OS_RdyListInsert函数把任务插入到就绪列表,优先级为几,就插到下标为几的 就绪列表成员里。
void OS_RdyListInsert (OS_TCB *p_tcb)
每个就绪列表成员都包含三个变量,分别是头任务指针HeadPtr,尾任务指针TailPtr,任务总数NbrEntries
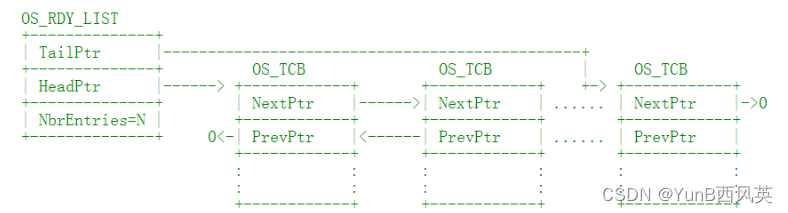
所以一个优先级可以有很多任务,但目前的代码是按照每个优先级只有一个任务来处理的
5、获得当前最高优先级
利用OS_PrioGetHighest()函数从优先级表OSPrioTbl中查找最高的优先级,并返回该优先级prio
OS_PRIO OS_PrioGetHighest (void)

寻找办法为
- 优先级表
OSPrioTbl的头指针依次递增判断是否为0(准确来说是32个0),再对第一个不为0的OSPrioTbl成员使用CPU_CntLeadZeros函数。
在这个过程中,每跳过一个OSPrioTbl成员,都要给优先级prio+32(因为我们设置一个OSPrioTbl成员为32位) CPU_CntLeadZeros函数作用为把32位拆成4个8位,从高8位到低8位找到第一个不为0的8位,计算其前导0数量,再加上高位8位数量(比如第三个8位不为0,那就第三个8位的前导0数量 + 16),把最后的值加给优先级prio- 返回
prio,这个数就是目前最高的优先级
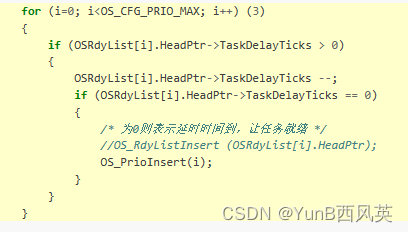
6、调用最高优先级任务
通过优先级调用就绪列表的任务,按顺序调用
如果任务陷入阻塞状态,那么就在优先级表中把对应优先级设为0.
这里只需将任务在优先级表中对应的位清除即可,暂时不需要把任务TCB从OSRdyList[]中移除, 因为接下来OSTimeTick()函数还是通过扫描OSRdyList[]来判断任务的延时时间是否到期。
当我们加入了时基列表之后, 当任务调用OSTimeDly()函数进行延时,就可以把任务的TCB从就绪列表删除,然后把任务TCB插入时基列表, OSTimeTick()函数判断任务的延时是否到期只需通过扫描时基列表即可,时基列表在下一个章节实现。
所以这里暂时不能把TCB从就绪列表中删除,只是将任务优先级在优先级表中对应的位清除来达到任务不处于就绪态的目的。
阻塞状态结束,就将优先级再改回1
这部分代码由于涉及系统时钟,所以放在SysTick中断服务函数中,由系统调用



![[Linux] 进程间通信基础](https://img-blog.csdnimg.cn/img_convert/7b0d6ba5dcce6ce6b2e732fdffde6496.gif#pic_center)