目录
- 引言
- 代码目录
- segment-anything 代码详解
- build_sam.py
- predictor.py
- automatic_mask_generator.py
引言
从去年年初至今,SAM(Segment Anything )已经问世快一年了,SAM凭借其强大而突出的泛化性能在各项任务上取得了优异的表现,广大的研究者竞相跟进,对SAM以及其应用做了广泛而深入的研究,产生了许许多多的研究成果。写下这篇文章的时间是2024年的3月13日,写作这篇文章一方面是让自己对SAM有一个更清晰透彻的了解,另一方面是为后来者提供一下学习上的方面。对于论文,网上有很多很多的讲解,我在此就不加赘述了,本文主要关注代码的部分,对代码进行逐层的剖析。
代码目录
论文链接地址:https://ai.facebook.com/research/publications/segment-anything/
github仓库:https://github.com/facebookresearch/segment-anything
我下载代码的时间是2024年的3月13日,代码的完整目录结构是这样的
其中:
assets:存放的是图片
demo:存放的是前端部署的代码
notebooks:存的是使用的教程,包含三部分,第一部分是onnx跨平台实例,第二部分automatic_mask_generator_example是全景分割,第三部分predictor_example是prompt(使用point或bbox)分割
script:存放的是一些导出的脚本
segment_anything:这个是项目的核心代码
其余的目录和文件可以忽略不计
因此作为一个初学者,你可以对这个目录进行化简,方便学习和理解代码的全貌。(注:项目的代码可以不安装,从github下载下来后,配置完权重后可以直接运行,这种方式比较适合学习和后续研究)
上图是目录化简后的全貌,多出的checkpoints 目录存放的是网络的权重:vit_h,vit_l,vit_b ,在显存不是很充足的情况下(GPU 显存小于12G)请选用vit_b。
segment-anything 代码详解
build_sam.py
这个文件包含三层的封装,最外层是sam_model_registry,它提供了统一的接口,用来选择vit_h,vit_l,vit_b,默认使用vit_h
sam_model_registry = {
"default": build_sam_vit_h,
"vit_h": build_sam_vit_h,
"vit_l": build_sam_vit_l,
"vit_b": build_sam_vit_b,
}
然后是三种模型的构建,也就是第二层build_sam_vit_x,这三个sam模型的差别主要体现维度,深度,注意力机制头的个数,在哪几层做注意力机制
def build_sam_vit_h(checkpoint=None):
return _build_sam(
encoder_embed_dim=1280,
encoder_depth=32,
encoder_num_heads=16,
encoder_global_attn_indexes=[7, 15, 23, 31],
checkpoint=checkpoint,
)
build_sam = build_sam_vit_h
def build_sam_vit_l(checkpoint=None):
return _build_sam(
encoder_embed_dim=1024,
encoder_depth=24,
encoder_num_heads=16,
encoder_global_attn_indexes=[5, 11, 17, 23],
checkpoint=checkpoint,
)
def build_sam_vit_b(checkpoint=None):
return _build_sam(
encoder_embed_dim=768,
encoder_depth=12,
encoder_num_heads=12,
encoder_global_attn_indexes=[2, 5, 8, 11],
checkpoint=checkpoint,
)
这段代码是sam 模型构建的统一代码,主要构建一个image_encoder,prompt_encoder,mask_decoder,以及在有权重的情况下加载sam的权重
def _build_sam(
encoder_embed_dim,
encoder_depth,
encoder_num_heads,
encoder_global_attn_indexes,
checkpoint=None,
):
prompt_embed_dim = 256
image_size = 1024
vit_patch_size = 16
image_embedding_size = image_size // vit_patch_size
sam = Sam(
image_encoder=ImageEncoderViT(
depth=encoder_depth,
embed_dim=encoder_embed_dim,
img_size=image_size,
mlp_ratio=4,
norm_layer=partial(torch.nn.LayerNorm, eps=1e-6),
num_heads=encoder_num_heads,
patch_size=vit_patch_size,
qkv_bias=True,
use_rel_pos=True,
global_attn_indexes=encoder_global_attn_indexes,
window_size=14,
out_chans=prompt_embed_dim,
),
prompt_encoder=PromptEncoder(
embed_dim=prompt_embed_dim,
image_embedding_size=(image_embedding_size, image_embedding_size),
input_image_size=(image_size, image_size),
mask_in_chans=16,
),
mask_decoder=MaskDecoder(
num_multimask_outputs=3,
transformer=TwoWayTransformer(
depth=2,
embedding_dim=prompt_embed_dim,
mlp_dim=2048,
num_heads=8,
),
transformer_dim=prompt_embed_dim,
iou_head_depth=3,
iou_head_hidden_dim=256,
),
pixel_mean=[123.675, 116.28, 103.53],
pixel_std=[58.395, 57.12, 57.375],
)
sam.eval()
if checkpoint is not None:
with open(checkpoint, "rb") as f:
state_dict = torch.load(f)
sam.load_state_dict(state_dict)
return sam
predictor.py
predictor.py文件实现了SamPredictor类,该类中包含两个重要的函数,一个是set_image函数,一个是predict函数,通过这两个函数可以反复高效地预测图片。
首先来看set_image这个函数
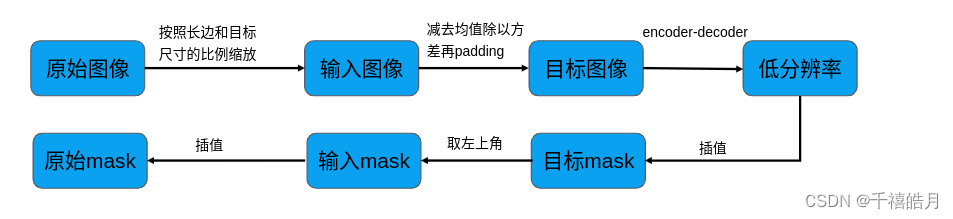
- 对输入的图像按照长边和目标尺寸的比例缩放
- 转换成tensor
- 转换成[1,3,h,w]的形式
- 调用
set_torch_image函数获得image在经过了image_encoder之后的特征或者说是image_embedding
def set_image(
self,
image: np.ndarray, # 需要是[h,w,c]的形式,uint8类型
image_format: str = "RGB", #RGB ,BGR
) -> None:
assert image_format in [
"RGB",
"BGR",
], f"image_format must be in ['RGB', 'BGR'], is {image_format}." #对类型进行断言判断
if image_format != self.model.image_format:
image = image[..., ::-1]
# Transform the image to the form expected by the model
input_image = self.transform.apply_image(image) #对按长边和目标尺寸的比例缩放
input_image_torch = torch.as_tensor(input_image, device=self.device) #转换成tensor
input_image_torch = input_image_torch.permute(2, 0, 1).contiguous()[None, :, :, :] #转换成[1,3,h,w]
self.set_torch_image(input_image_torch, image.shape[:2])
对于set_torch_image这个函数,主要有两个功能
- 对transformed_image进行预处理
减去imagenet均值,除以imagenet标准差 - 对输入图像进行
image_encoder编码
def set_torch_image(
self,
transformed_image: torch.Tensor,
original_image_size: Tuple[int, ...], #原始的未经转换过的图像的大小
) -> None:
assert (
len(transformed_image.shape) == 4
and transformed_image.shape[1] == 3
and max(*transformed_image.shape[2:]) == self.model.image_encoder.img_size
), f"set_torch_image input must be BCHW with long side {self.model.image_encoder.img_size}."
self.reset_image()
self.original_size = original_image_size
self.input_size = tuple(transformed_image.shape[-2:])
input_image = self.model.preprocess(transformed_image) #图像预处理,减去均值,除以方差
self.features = self.model.image_encoder(input_image) #对图像进行进行image_encoder编码
self.is_image_set = True
set_image只需要做一次,反复使用,predict函数可以做多次,predict函数有以下几个参数
point_coords: 是一个nx2的数组,以[x,y]的形式传入
point_labels: 长度为n的数组,前景点为1,背景点为0
bbox :长度为4的数组,形式为xyxy
mask_input:低分辨率的mask,来源于前一个迭代,形状为1xhxw, 其中h=w=256
multimask_output :当为true的时候会返回3个mask,对于模棱两可的prompt比如一个点,多输出可以比单单输出产生更高质量的Mask,如果只有一个mask是被需要的,可以通过quality score 来筛选mask,对于非模棱两可的输入,比如多个prompt,将multmask_output设置为false可以得到更好的结果
return_logits:如果设置为true,返回非抑制后的值,否则返回二值化的mask
def predict(
self,
point_coords: Optional[np.ndarray] = None,
point_labels: Optional[np.ndarray] = None,
box: Optional[np.ndarray] = None,
mask_input: Optional[np.ndarray] = None,
multimask_output: bool = True,
return_logits: bool = False,
) -> Tuple[np.ndarray, np.ndarray, np.ndarray]:
"""
Predict masks for the given input prompts, using the currently set image.
Returns:
(np.ndarray): The output masks in CxHxW format, where C is the
number of masks, and (H, W) is the original image size.
(np.ndarray): An array of length C containing the model's
predictions for the quality of each mask.
(np.ndarray): An array of shape CxHxW, where C is the number
of masks and H=W=256. These low resolution logits can be passed to
a subsequent iteration as mask input.
"""
if not self.is_image_set:
raise RuntimeError("An image must be set with .set_image(...) before mask prediction.")
# Transform input prompts
coords_torch, labels_torch, box_torch, mask_input_torch = None, None, None, None
if point_coords is not None:
assert (
point_labels is not None
), "point_labels must be supplied if point_coords is supplied."
point_coords = self.transform.apply_coords(point_coords, self.original_size) #和图像尺寸一致
coords_torch = torch.as_tensor(point_coords, dtype=torch.float, device=self.device)
labels_torch = torch.as_tensor(point_labels, dtype=torch.int, device=self.device)
coords_torch, labels_torch = coords_torch[None, :, :], labels_torch[None, :]
#在原有的基础上扩充一个维度[1,n,2] ,[1,n]
if box is not None:
box = self.transform.apply_boxes(box, self.original_size)
box_torch = torch.as_tensor(box, dtype=torch.float, device=self.device)
box_torch = box_torch[None, :]
#在原有的基础上扩充一个维度[1,n,4]
if mask_input is not None:
mask_input_torch = torch.as_tensor(mask_input, dtype=torch.float, device=self.device)
mask_input_torch = mask_input_torch[None, :, :, :]
masks, iou_predictions, low_res_masks = self.predict_torch(
coords_torch,
labels_torch,
box_torch,
mask_input_torch,
multimask_output,
return_logits=return_logits,
)
masks_np = masks[0].detach().cpu().numpy()
iou_predictions_np = iou_predictions[0].detach().cpu().numpy()
low_res_masks_np = low_res_masks[0].detach().cpu().numpy()
return masks_np, iou_predictions_np, low_res_masks_np
在predict函数中调用了 predict_torch这个函数来完成mask的预测,首先是调用了prompt_encoder,然后调用mask_decoder进行解码,最后对mask进行后处理
def predict_torch(
self,
point_coords: Optional[torch.Tensor],
point_labels: Optional[torch.Tensor],
boxes: Optional[torch.Tensor] = None,
mask_input: Optional[torch.Tensor] = None,
multimask_output: bool = True,
return_logits: bool = False,
) -> Tuple[torch.Tensor, torch.Tensor, torch.Tensor]:
if not self.is_image_set:
raise RuntimeError("An image must be set with .set_image(...) before mask prediction.")
if point_coords is not None:
points = (point_coords, point_labels)
else:
points = None
# Embed prompts
sparse_embeddings, dense_embeddings = self.model.prompt_encoder(
points=points,
boxes=boxes,
masks=mask_input,
)
# Predict masks
low_res_masks, iou_predictions = self.model.mask_decoder(
image_embeddings=self.features,
image_pe=self.model.prompt_encoder.get_dense_pe(),
sparse_prompt_embeddings=sparse_embeddings,
dense_prompt_embeddings=dense_embeddings,
multimask_output=multimask_output,
)
# Upscale the masks to the original image resolution
masks = self.model.postprocess_masks(low_res_masks, self.input_size, self.original_size)
if not return_logits:
masks = masks > self.model.mask_threshold
return masks, iou_predictions, low_res_masks
图像处理流程
automatic_mask_generator.py
automatic_mask_generator.py中实现了自动全景分割的类SamAutomaticMaskGenerator,通过产生一些列的网格点prompt,调用SamPredictor生成mask,然后去除低质量的点
model :SAM 模型
points_per_side:每条边的采样点个数,总点数是points_per_side的平方,如果该参数没有指定,需要显示指定point_grids
points_per_batch:每批次运行的点的个数,数字越大越快,但是会消耗更多的显存
pred_iou_thresh: iou阈值
stability_score_thresh :score阈值
stability_score_offset:没看懂
box_nms_thresh:非极大值抑制
crop_n_layers :层数,大于n>0时,在这张图片上进行n次全图分割
crop_nms_thresh:非极大值抑制
crop_overlap_ratio:crop的重合比例
crop_n_points_downscale_factor :每层每条边的点数降多少倍,就比如如果为2,每条边的点数就变成16,总点数256
point_grids :一系列的点
min_mask_region_area :最小区域面积
output_mode :输出模式
def __init__(
self,
model: Sam,
points_per_side: Optional[int] = 32,
points_per_batch: int = 64,
pred_iou_thresh: float = 0.88,
stability_score_thresh: float = 0.95,
stability_score_offset: float = 1.0,
box_nms_thresh: float = 0.7,
crop_n_layers: int = 0,
crop_nms_thresh: float = 0.7,
crop_overlap_ratio: float = 512 / 1500,
crop_n_points_downscale_factor: int = 1,
point_grids: Optional[List[np.ndarray]] = None,
min_mask_region_area: int = 0,
output_mode: str = "binary_mask",
) -> None:
"""
Using a SAM model, generates masks for the entire image.
Generates a grid of point prompts over the image, then filters
low quality and duplicate masks. The default settings are chosen
for SAM with a ViT-H backbone.
assert (points_per_side is None) != (
point_grids is None
), "Exactly one of points_per_side or point_grid must be provided."
#生成网格点,或者批量指定
if points_per_side is not None:
self.point_grids = build_all_layer_point_grids(
points_per_side,
crop_n_layers,
crop_n_points_downscale_factor,
)
elif point_grids is not None:
self.point_grids = point_grids
else:
raise ValueError("Can't have both points_per_side and point_grid be None.")
assert output_mode in [
"binary_mask",
"uncompressed_rle",
"coco_rle",
], f"Unknown output_mode {output_mode}."
if output_mode == "coco_rle":
from pycocotools import mask as mask_utils # type: ignore # noqa: F401
if min_mask_region_area > 0:
import cv2 # type: ignore # noqa: F401
self.predictor = SamPredictor(model)
self.points_per_batch = points_per_batch
self.pred_iou_thresh = pred_iou_thresh
self.stability_score_thresh = stability_score_thresh
self.stability_score_offset = stability_score_offset
self.box_nms_thresh = box_nms_thresh
self.crop_n_layers = crop_n_layers
self.crop_nms_thresh = crop_nms_thresh
self.crop_overlap_ratio = crop_overlap_ratio
self.crop_n_points_downscale_factor = crop_n_points_downscale_factor
self.min_mask_region_area = min_mask_region_area
self.output_mode = output_mode
在__init__()函数中最终要的是生成网格点,默认每条边生成32个点,总共生成32的平方个点,这些点是归一化的点
generate函数用来生成mask,它是一系列操作的一个封装,返回的是一个list,列表里包含每个mask_region的相关信息
def generate(self, image: np.ndarray) -> List[Dict[str, Any]]:
# Generate masks
mask_data = self._generate_masks(image) #核心函数
# Filter small disconnected regions and holes in masks
if self.min_mask_region_area > 0:
mask_data = self.postprocess_small_regions(
mask_data,
self.min_mask_region_area,
max(self.box_nms_thresh, self.crop_nms_thresh),
)
# Encode masks
if self.output_mode == "coco_rle":
mask_data["segmentations"] = [coco_encode_rle(rle) for rle in mask_data["rles"]]
elif self.output_mode == "binary_mask":
mask_data["segmentations"] = [rle_to_mask(rle) for rle in mask_data["rles"]]
else:
mask_data["segmentations"] = mask_data["rles"]
# Write mask records
curr_anns = []
for idx in range(len(mask_data["segmentations"])):
ann = {
"segmentation": mask_data["segmentations"][idx],
"area": area_from_rle(mask_data["rles"][idx]),
"bbox": box_xyxy_to_xywh(mask_data["boxes"][idx]).tolist(),
"predicted_iou": mask_data["iou_preds"][idx].item(),
"point_coords": [mask_data["points"][idx].tolist()],
"stability_score": mask_data["stability_score"][idx].item(),
"crop_box": box_xyxy_to_xywh(mask_data["crop_boxes"][idx]).tolist(),
}
curr_anns.append(ann)
return curr_anns
在generate函数中会调用 _generate_masks函数
def _generate_masks(self, image: np.ndarray) -> MaskData:
orig_size = image.shape[:2]
crop_boxes, layer_idxs = generate_crop_boxes(
orig_size, self.crop_n_layers, self.crop_overlap_ratio
)
# Iterate over image crops
data = MaskData()
for crop_box, layer_idx in zip(crop_boxes, layer_idxs):
crop_data = self._process_crop(image, crop_box, layer_idx, orig_size)
data.cat(crop_data)
# Remove duplicate masks between crops
if len(crop_boxes) > 1:
# Prefer masks from smaller crops
scores = 1 / box_area(data["crop_boxes"])
scores = scores.to(data["boxes"].device)
keep_by_nms = batched_nms(
data["boxes"].float(),
scores,
torch.zeros_like(data["boxes"][:, 0]), # categories
iou_threshold=self.crop_nms_thresh,
)
data.filter(keep_by_nms)
data.to_numpy()
return data
对crop出来的图片进行进行预测
def _process_crop(
self,
image: np.ndarray,
crop_box: List[int],
crop_layer_idx: int,
orig_size: Tuple[int, ...],
) -> MaskData:
# Crop the image and calculate embeddings
x0, y0, x1, y1 = crop_box
cropped_im = image[y0:y1, x0:x1, :]
cropped_im_size = cropped_im.shape[:2]
self.predictor.set_image(cropped_im)
# Get points for this crop
points_scale = np.array(cropped_im_size)[None, ::-1]
points_for_image = self.point_grids[crop_layer_idx] * points_scale
# Generate masks for this crop in batches
data = MaskData()
for (points,) in batch_iterator(self.points_per_batch, points_for_image):
batch_data = self._process_batch(points, cropped_im_size, crop_box, orig_size)
data.cat(batch_data)
del batch_data
self.predictor.reset_image()
# Remove duplicates within this crop.
keep_by_nms = batched_nms(
data["boxes"].float(),
data["iou_preds"],
torch.zeros_like(data["boxes"][:, 0]), # categories
iou_threshold=self.box_nms_thresh,
)
data.filter(keep_by_nms)
# Return to the original image frame
data["boxes"] = uncrop_boxes_xyxy(data["boxes"], crop_box)
data["points"] = uncrop_points(data["points"], crop_box)
data["crop_boxes"] = torch.tensor([crop_box for _ in range(len(data["rles"]))])
return data
输入批量的点批量预测
def _process_batch(
self,
points: np.ndarray,
im_size: Tuple[int, ...],
crop_box: List[int],
orig_size: Tuple[int, ...],
) -> MaskData:
orig_h, orig_w = orig_size
# Run model on this batch
transformed_points = self.predictor.transform.apply_coords(points, im_size)
in_points = torch.as_tensor(transformed_points, device=self.predictor.device)
in_labels = torch.ones(in_points.shape[0], dtype=torch.int, device=in_points.device)
masks, iou_preds, _ = self.predictor.predict_torch(
in_points[:, None, :], #[b,n,2]
in_labels[:, None], #[b,n]
multimask_output=True,
return_logits=True,
)
# Serialize predictions and store in MaskData
data = MaskData(
masks=masks.flatten(0, 1),
iou_preds=iou_preds.flatten(0, 1),
points=torch.as_tensor(points.repeat(masks.shape[1], axis=0)),
)
del masks
# Filter by predicted IoU
if self.pred_iou_thresh > 0.0:
keep_mask = data["iou_preds"] > self.pred_iou_thresh
data.filter(keep_mask)
# Calculate stability score
data["stability_score"] = calculate_stability_score(
data["masks"], self.predictor.model.mask_threshold, self.stability_score_offset
)
if self.stability_score_thresh > 0.0:
keep_mask = data["stability_score"] >= self.stability_score_thresh
data.filter(keep_mask)
# Threshold masks and calculate boxes
data["masks"] = data["masks"] > self.predictor.model.mask_threshold
data["boxes"] = batched_mask_to_box(data["masks"])
# Filter boxes that touch crop boundaries
keep_mask = ~is_box_near_crop_edge(data["boxes"], crop_box, [0, 0, orig_w, orig_h])
if not torch.all(keep_mask):
data.filter(keep_mask)
# Compress to RLE
data["masks"] = uncrop_masks(data["masks"], crop_box, orig_h, orig_w)
data["rles"] = mask_to_rle_pytorch(data["masks"])
del data["masks"]
return data

![[全志T113]:Tina SDK安装](https://img-blog.csdnimg.cn/direct/1601d09d4d4543fc8eadb2986d84d524.png#pic_center)