F1 使用问题总结
问题一:话题发布
问题二:网络问题
一:话题发布
$ rostopic pub -r 10 #每秒发布十次
提示:以下是本篇文章正文内容,下面案例可供参考
一:rostopic命令将ROS话题的输出内容记录下来
在ROS中,可以使用rostopic命令将ROS话题的输出内容记录下来。具体步骤如下:
-
首先,确保你已经安装了ROS,并且已经启动了ROS系统。
-
打开一个终端窗口,输入以下命令来查看当前正在发布的话题列表:
rostopic list -
选择你想要记录的话题,并使用rostopic echo命令来查看该话题的内容:
rostopic echo /topic_name其中,/topic_name是你要记录的话题名称。
-
如果你只想记录话题的内容到一个文件中,可以使用rostopic echo命令的重定向功能,将输出内容保存到一个文件中:
rostopic echo /topic_name > output.txt这将把话题/topic_name的内容保存到名为output.txt的文件中。
-
如果你想实时记录话题的内容,并将其保存到一个文件中,可以使用rostopic echo命令的重定向功能结合tee命令:
rostopic echo /topic_name | tee -a output.txt这将实时将话题/topic_name的内容输出到终端,并将其追加保存到output.txt文件中。
请注意,以上方法只能记录当前正在发布的话题内容。如果你想记录历史数据或者更复杂的记录需求,可能需要使用其他工具或编写自定义代码来实现。
一:ROS分布式远程控制网络配置
分布式介绍
ROS是一种分布式软件框架,节点之间通过松耦合的方式进行组合,在很多应用场景下,节点可以运行在不同的计算平台上,通过Topic、Service进行通信。但是RO S中只允许存在一个Master,在多机系统中Master只能运行在一台机器上,其他机器需要通过ssh的方式和Master取得联系。所以在多机ROS系统中需要进行一些配置。
应用场景
我们以我们的计算机(Ubuntu系统)和需要远程操控的小车为例,介绍分布式多机通信的配置,其中小车树莓派/NANO的系统作为主机运行Master,我们的计算机作为从机运行节点。
当计算机连接上小车的wifi之后,小车会自动在192.168.12网段上为计算机分配一个地址。首先,在命令行中查看本机IP地址,输入命令:
ifconfig
如果本机IP为192.168.12.XXX,说明与智能车连接正常。
主从机配置环境搭建
计算机虚拟机配置
以上的步骤主要完成了将小车和虚拟机系统建立在了同一个局域网下,保证两个设备能够正常的进行网络通信。
接下来,我们要进行ROS的主从机环境配置。
首先在计算机虚拟机ubuntu系统的/etc路径下配置hosts文件
$ sudo vi /etc/hosts
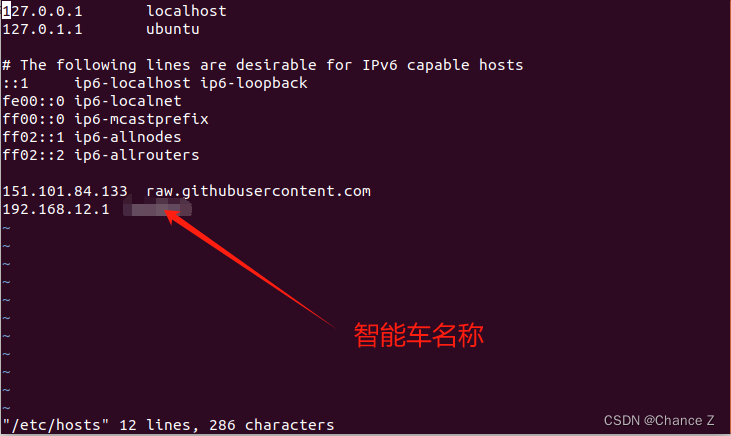
如上图所示,此配置的作用是将智能车的IP地址写到计算机虚拟机ubuntu系统中,让计算机虚拟机知道智能车在网络中的名称和对应的IP地址。
接下来需要进入计算机虚拟机ubuntu系统的home路径下,然后按ctrl+H键显示home路径下的隐藏文件。在显示出来的文件找.bashrc文件。
或者:
sudo vim ~/.bashrc
打开.bashrc文件,并在文件末尾添加如下两句代码,其意义是将小车 ** 智能车名称 ** 设置为主机。

智能车配置
打开智能终端
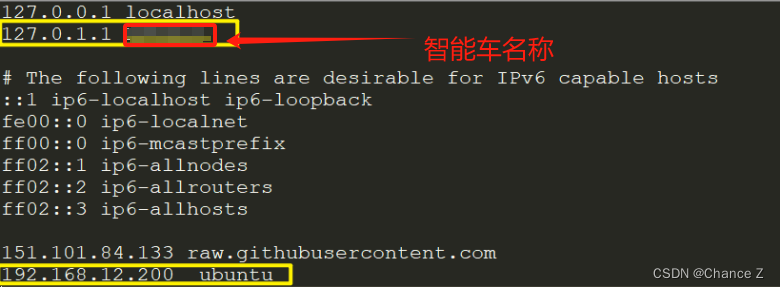
然后在/etc路径下打开hosts文件
将我们查到的ubuntu系统的IP地址写到小车的hosts文件中,用以匹配作为从机的计算机。同时将127.0.1.1设置为自己的名称。
总结
函数和方法。