STM32 TIM PWM高阶操作:刹车及状态约束
刹车及状态约束是STM32 TIM PWM控制里面比较复杂的一部分,涉及到PWM波形产生前,中,后的管脚状态输出。
这里先引入两个描述,一个是“半高阻”,意思是STM32管脚输出高阻时,内部的上拉或者下拉设置仍然有效。一个是“全高阻”,意思是STM32管脚输出高阻时,内部上拉或者下拉也被断开,是完全的高阻态输出。
STM32 PWM 刹车特性
所谓刹车(Break, Shut-Down)是指在PWM信号输出过程中,接收到触发信号,停止PWM信号的输出。而PWM信号停止之前之后输出什么状态,则是需要明确设定,避免负载端出现异常。而刹车以及再出发也有相应的控制机制。
刹车实际上有快刹(Break,信号控制停止)和慢刹(Stop, 指令控制停止)两种方式,一般情况下慢刹也够用,所以快刹的详细介绍文章较少。这里会对慢刹和快刹都进行操作介绍。
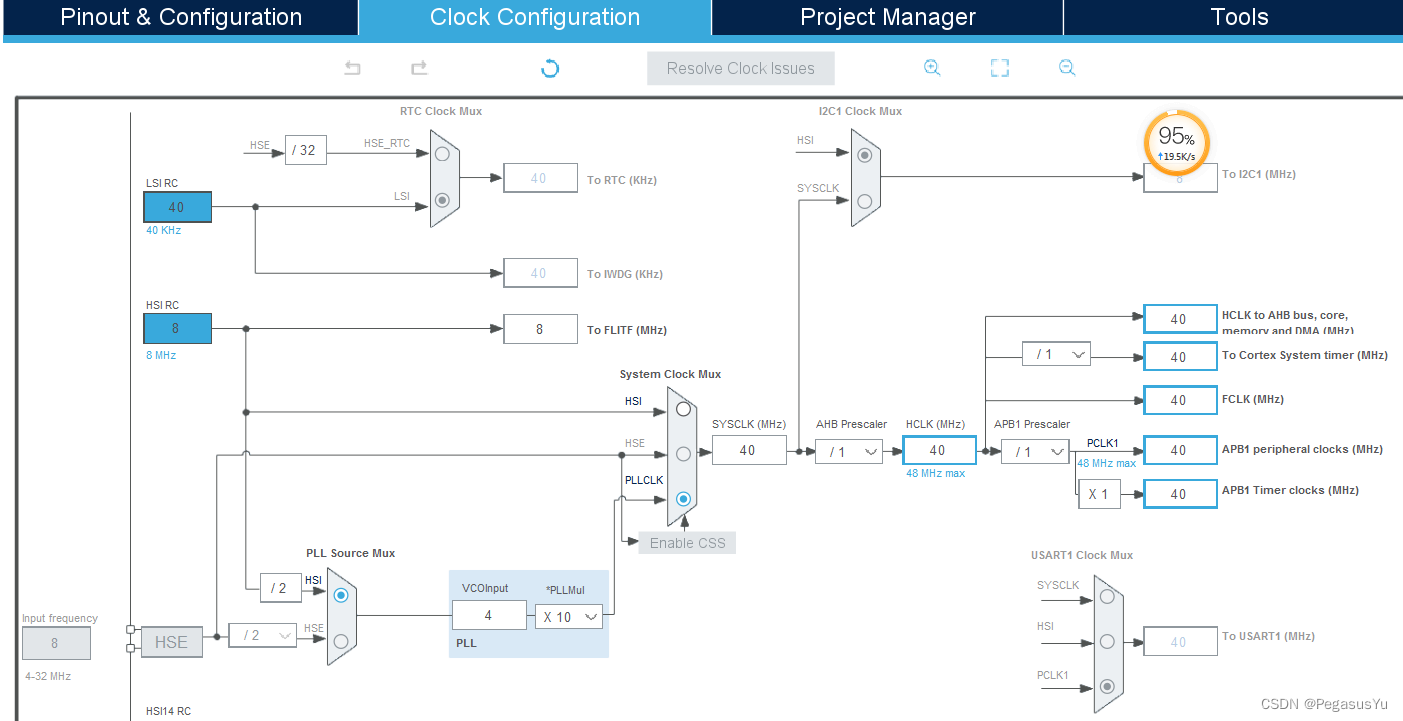
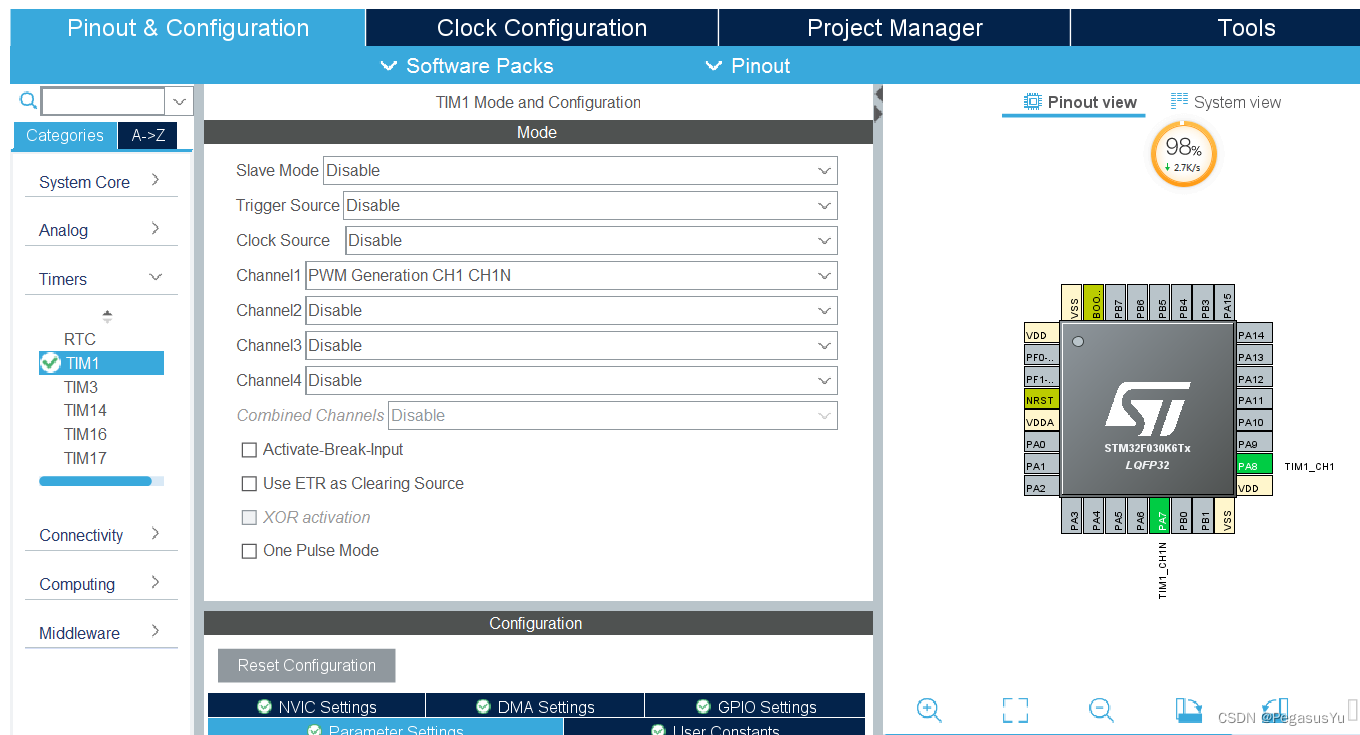
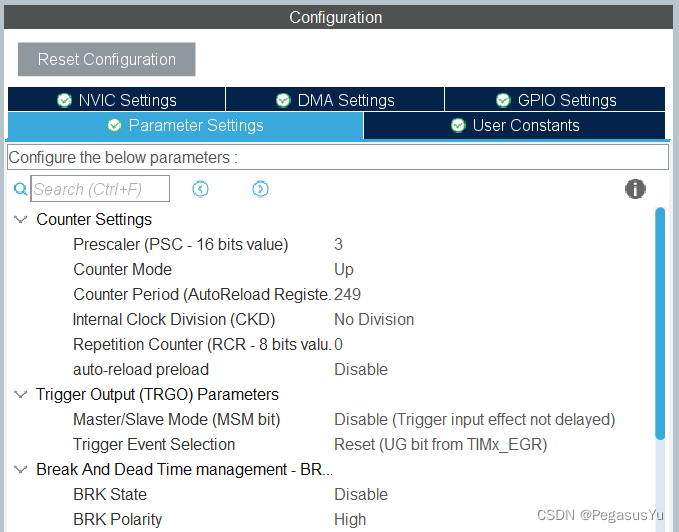
以STM32F030K6T6芯片及STM32CUBEIDE开发环境为例,首先在TIM1配置一对互补PWM输出通道,设置为40KHz的PWM输出。
配置工作时钟为40MHz:
 设置一对PWM互补输出:
设置一对PWM互补输出:
设置为40KHz输出PWM:

STM32 PWM 慢刹机制
上述设置保存生成工程初始代码后,就可以在main函数里while循环前启动PWM,对于正通道CH的启动代码为:
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
而反通道CHN的启动代码为:
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);
所以对于互补通道而言,正通道和反通道是各自启动,不是一个启动代码/指令实现正反通道同步启动。另外一方面,虽然正反通道可以不同时启动,但只要都启动了,就会按照配置时的输出电平相位关系输出。也就是说,后启动的通道并不是一定从一个脉冲的前沿电平开始输出,而是与先启动的通道从耦合着的相位电平输出。
慢刹车机制有两种,一种是实时代码停止PWM输出,此后PWM管脚进入半高阻态,如果没有设置内部上拉或下拉,则等同于进入全高阻态。如果设置了内部上拉或下拉,则由上拉电平决定PWM管脚电平。对于正通道CH的停止代码为:
HAL_TIM_PWM_Stop(&htim1,TIM_CHANNEL_1);
对于反通道CHN的停止代码为:
HAL_TIMEx_PWMN_Stop(&htim1,TIM_CHANNEL_1);
在没有内部上拉或下拉,并且外部无连接影响电平时,高阻输出的状态,对于万用表和示波器测的结果是0V状态。如果要重新进入PWM运行状态,只需要重新启动HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);和HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);即可。
另一种慢刹机制是实时代码关闭PWM模式,此后PWM管脚进入全高阻态,内部上拉或下拉无效。如果要重新进入PWM模式,需要重新初始化。
正通道和反通道的PWM模式关闭代码为:
HAL_TIM_Base_DeInit(&htim1);
而当需要重新进入PWM模式,则需要初始化:
MX_TIM1_Init();
然后再使用HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);和HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);即可。
由上面介绍可知,再TIM1初始化PWM后,但没有输出PWM信号前,是半高阻态,如果设置了上拉或下拉,就会影响PWM信号输出前的默认电平状态。
STM32 PWM 快刹机制
快刹机制刹车信号的输入有三种: BRK, BRK_ARTH, BRK2, 对于具体的某一个TIM,能用于刹车输入的是上述三种的子集。如:


相关的刹车输入信号描述,可以参考官方的文档 Using STM32 device PWM shut-down features 。
这里主要基于BKIN–>BRK来描述PWM的刹车控制的机制和时序。
STM32 PWM BKIN快刹
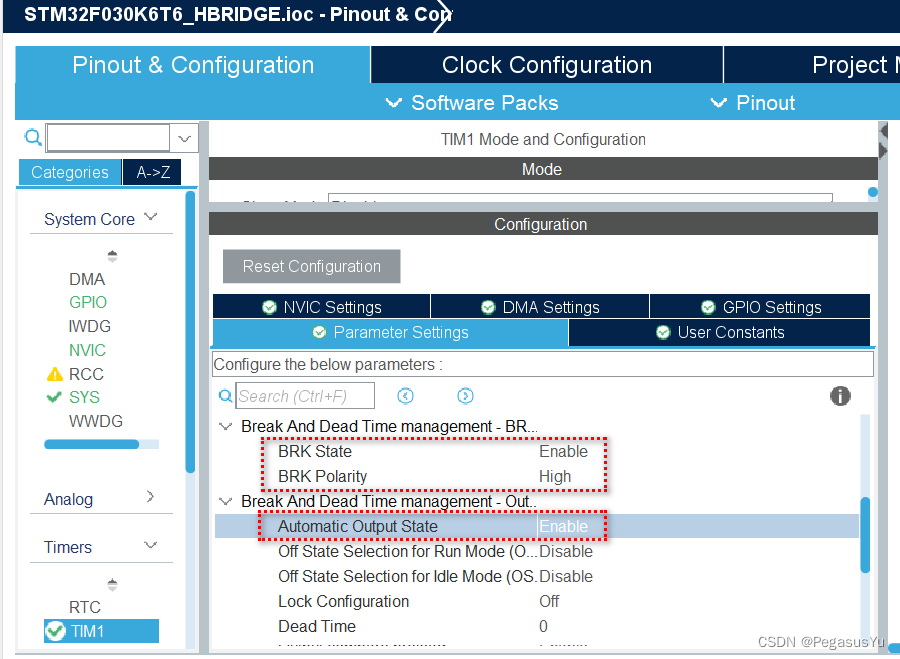
首先,在PWM配置界面使能刹车输入:

这是总的刹车输入开关,一旦使能,自动会使能BRK输入:

实际上,这个时候还可以关闭BRK输入使能,而刹车输入开关不受影响,意味着虽然BRK输入关闭了,但是BRK_ARTH, BRK2刹车输入仍有效(当然也要先做相关输入配置):

这里需要采用BRK作为刹车输入,所以将其再使能:
刹车输入开关(Active-Break-Input)使能后, BKIN管脚就被征用了,不管后面设置是否使能BRK刹车输入。对于STM32F030K6T6, TIM1的BKIN管脚是PA6:
 BRK Polarity是选择BRK的刹车有效电平,也就是选择BKIN管脚作为刹车输入的有效电平。BRK Polarity为High时,BKIN管脚收到上升沿电平后会产生PWM信号输出的刹车;BRK Polarity为Low时,BKIN管脚收到下降沿电平后会产生PWM信号输出的刹车;
BRK Polarity是选择BRK的刹车有效电平,也就是选择BKIN管脚作为刹车输入的有效电平。BRK Polarity为High时,BKIN管脚收到上升沿电平后会产生PWM信号输出的刹车;BRK Polarity为Low时,BKIN管脚收到下降沿电平后会产生PWM信号输出的刹车;
PA5管脚靠近PA6管脚,将两个管脚短路帽短接,就可以通过PA5输出刹车信号给PA6刹车输入管脚,实现刹车的测试,将PA5管脚配置为输出:

在配置BRK Polarity为High时,用以下代码可以通过示波器测试刹车的功能:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*Written by Pegasus Yu in 2022
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
__IO float usDelayBase;
void PY_usDelayTest(void)
{
__IO uint32_t firstms, secondms;
__IO uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
__IO uint32_t firstms, secondms;
__IO float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
__IO uint32_t delayReg;
__IO uint32_t msNum = Delay/1000;
__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET); //no brake
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);
PY_Delay_us(5000000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET); //brake
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL10;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 3;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 249;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_ENABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PA5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
上述代码实现了驱动一组互补PWM输出5秒后,PA5输出刹车信号,PA6接收到刹车信号后,将PWM的输出刹车关闭。其中,延时函数PY_Delay_us()的原理参考 STM32 HAL us delay(微秒延时)的指令延时实现方式及优化 。
STM32 PWM BKIN快刹后恢复PWM输出
STM32 PWM BKIN快刹后恢复PWM输出有两种方式,和Automatic Output Status参数有关:

Automatic Output Status为Disable时,不能通过BRK刹车输入信号的电平反向恢复PWM输出,而需要重新初始化TIM和使能PWM输出。如下的代码对应刹车5秒后重新恢复TIM PWM输出,注意这里刹车后只使能PWM输出没有重新初始化TIM是无效的:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*Written by Pegasus Yu in 2022
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
float usDelayBase;
void PY_usDelayTest(void)
{
uint32_t firstms, secondms;
uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
uint32_t delayReg;
uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
uint32_t firstms, secondms;
float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
uint32_t delayReg;
uint32_t msNum = Delay/1000;
uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);//no brake
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);
PY_Delay_us(5000000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);//brake
PY_Delay_us(5000000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);//no brake
MX_TIM1_Init();
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1); //pwm output
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL10;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 3;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 249;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_ENABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PA5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
而当Automatic Output Status设置为Enable时,则BRK信号从刹车电平反向后,会自动恢复PWM信号的输出,与上面的方式效果一样,而减少了代码调用逻辑:
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2022 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*Written by Pegasus Yu in 2022
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
TIM_HandleTypeDef htim1;
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_TIM1_Init(void);
/* USER CODE BEGIN PFP */
float usDelayBase;
void PY_usDelayTest(void)
{
uint32_t firstms, secondms;
uint32_t counter = 0;
firstms = HAL_GetTick()+1;
secondms = firstms+1;
while(uwTick!=firstms) ;
while(uwTick!=secondms) counter++;
usDelayBase = ((float)counter)/1000;
}
void PY_Delay_us_t(uint32_t Delay)
{
uint32_t delayReg;
uint32_t usNum = (uint32_t)(Delay*usDelayBase);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
void PY_usDelayOptimize(void)
{
uint32_t firstms, secondms;
float coe = 1.0;
firstms = HAL_GetTick();
PY_Delay_us_t(1000000) ;
secondms = HAL_GetTick();
coe = ((float)1000)/(secondms-firstms);
usDelayBase = coe*usDelayBase;
}
void PY_Delay_us(uint32_t Delay)
{
uint32_t delayReg;
uint32_t msNum = Delay/1000;
uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);
if(msNum>0) HAL_Delay(msNum);
delayReg = 0;
while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_TIM1_Init();
/* USER CODE BEGIN 2 */
PY_usDelayTest();
PY_usDelayOptimize();
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);//no brake
HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1);
HAL_TIMEx_PWMN_Start(&htim1,TIM_CHANNEL_1);
PY_Delay_us(5000000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_SET);//brake
PY_Delay_us(5000000);
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);//no brake & PWM outut
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL10;
RCC_OscInitStruct.PLL.PREDIV = RCC_PREDIV_DIV2;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_1) != HAL_OK)
{
Error_Handler();
}
}
/**
* @brief TIM1 Initialization Function
* @param None
* @retval None
*/
static void MX_TIM1_Init(void)
{
/* USER CODE BEGIN TIM1_Init 0 */
/* USER CODE END TIM1_Init 0 */
TIM_MasterConfigTypeDef sMasterConfig = {0};
TIM_OC_InitTypeDef sConfigOC = {0};
TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};
/* USER CODE BEGIN TIM1_Init 1 */
/* USER CODE END TIM1_Init 1 */
htim1.Instance = TIM1;
htim1.Init.Prescaler = 3;
htim1.Init.CounterMode = TIM_COUNTERMODE_UP;
htim1.Init.Period = 249;
htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim1.Init.RepetitionCounter = 0;
htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
if (HAL_TIM_PWM_Init(&htim1) != HAL_OK)
{
Error_Handler();
}
sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;
sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;
if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK)
{
Error_Handler();
}
sConfigOC.OCMode = TIM_OCMODE_PWM1;
sConfigOC.Pulse = 0;
sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;
sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;
sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;
sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;
sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;
if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK)
{
Error_Handler();
}
sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;
sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;
sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;
sBreakDeadTimeConfig.DeadTime = 0;
sBreakDeadTimeConfig.BreakState = TIM_BREAK_ENABLE;
sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;
sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_ENABLE;
if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK)
{
Error_Handler();
}
/* USER CODE BEGIN TIM1_Init 2 */
/* USER CODE END TIM1_Init 2 */
HAL_TIM_MspPostInit(&htim1);
}
/**
* @brief GPIO Initialization Function
* @param None
* @retval None
*/
static void MX_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
__HAL_RCC_GPIOA_CLK_ENABLE();
/*Configure GPIO pin Output Level */
HAL_GPIO_WritePin(GPIOA, GPIO_PIN_5, GPIO_PIN_RESET);
/*Configure GPIO pin : PA5 */
GPIO_InitStruct.Pin = GPIO_PIN_5;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
STM32 PWM BKIN快刹后PWM管脚输出状态
刹车后的默认管脚状态也是必要的设计要点。涉及到OSSI选项的控制。
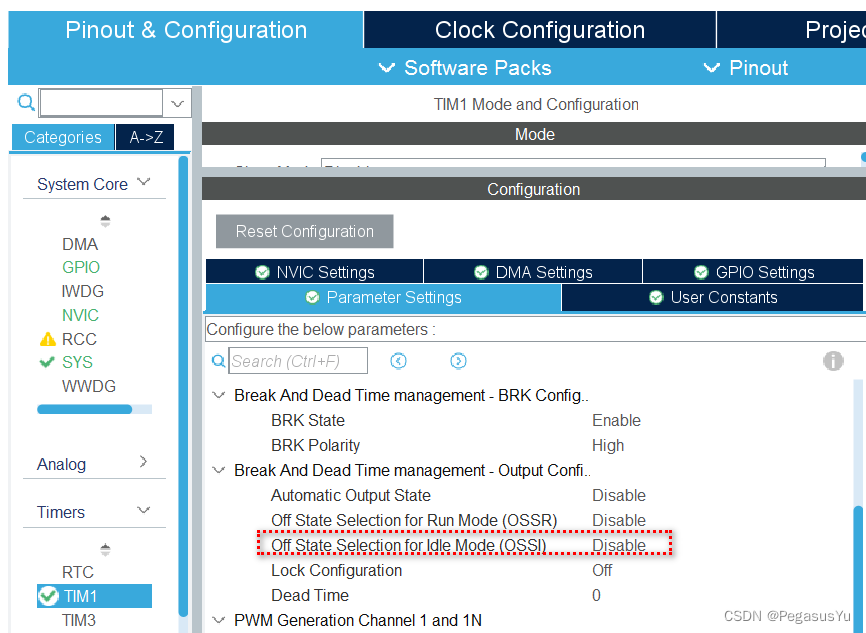
注意Break And Dead Time Management里面的几项是独立的关系,譬如Automatic Output State设置成Enable或Disable不影响其余几项的实施。
OSSI使能后,CH IDLE STATE和CHN IDLE STATE才有效,用于设定刹车后的管脚状态输出。OSSI不使能,刹车后的管脚输出半高阻态,这时候CH IDLE STATE和CHN IDLE STATE的设置无任何效果。

STM32 PWM 互补输出的不补输出转态
STM32 PWM互补输出的不补输出转态和OSSR参数相关:
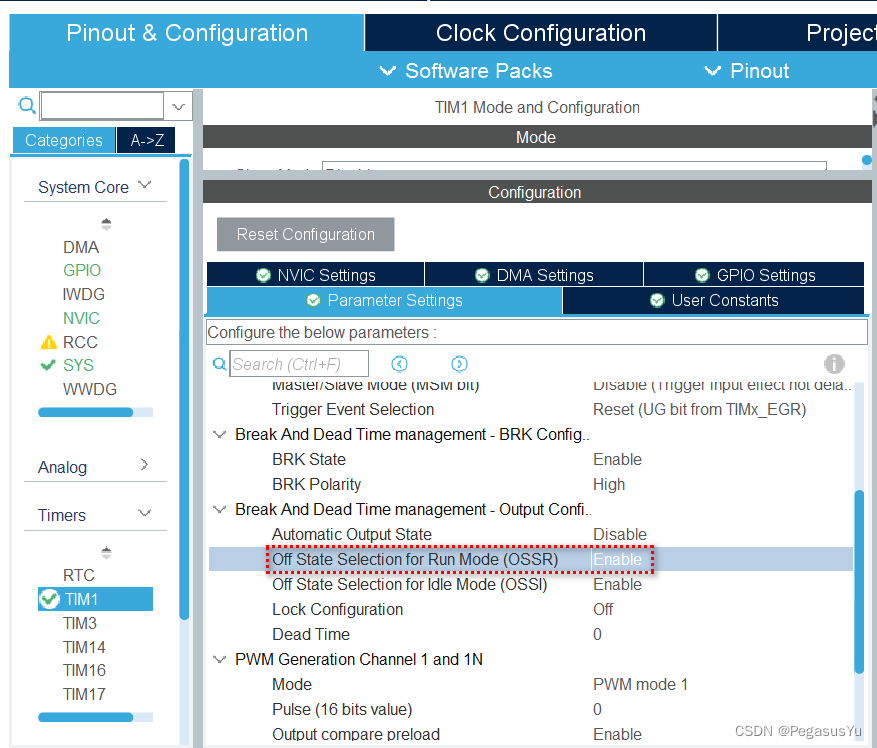
OSSR不使能,当互补输出正反两路的一路使能输出而另一路没有使能输出,没有使能输出的一路则输出半关闭高阻态,可以使用内部上下拉控制管脚状态。OSSR使能,当互补输出正反两路的一路使能输出而另一路没有使能输出,没有输出的一路则输出全关闭高阻态,内部上下拉无效。
STM32 PWM LOCK CONFIGURATION
因为PWM常用于控制功率输出负载,如果出现异常STM32程序跑飞,导致配置的寄存器混乱,进一步导致PWM输出异常,则会造成风险。Lock Configuration使能后,会形成保护机制,简而言之就是MCU启动后,代码配置Lock保护级别后,在下次重启前相关输出配置不能被修改。
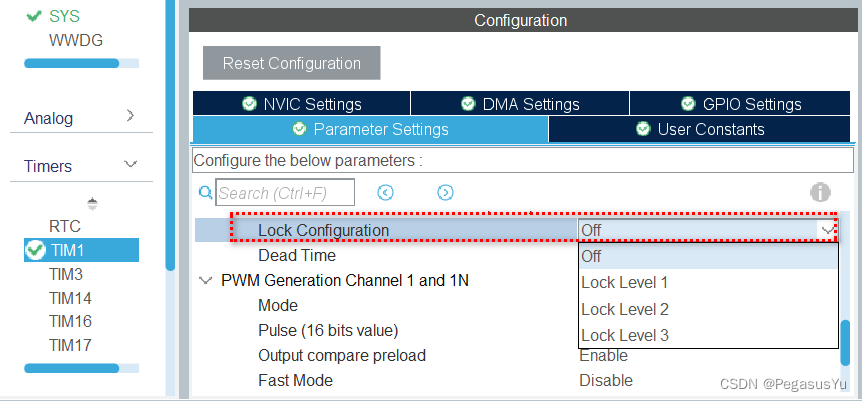
有三个保护级别,Lock Level 3的保护级别最高。一般采用Lock Level 1即可,会在下次复位前冻结TIMx_BDTR 寄存器中的
DTG/BKE/BKP/AOE/BKF/BK2F/BK2E/BK2P 位,以及TIMx_CR2 寄存器中的OISx/OISxN位。
–End–