(二十一)圆柱体模型分割点云
以下代码实现使用平面和圆柱形模型对点云进行采样一致性分割。
cylinder_segmentation.cpp
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/passthrough.h>
#include <pcl/features/normal_3d.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
typedef pcl::PointXYZ PointT;
int main ()
{
// All the objects needed
pcl::PCDReader reader;
pcl::PassThrough<PointT> pass;
pcl::NormalEstimation<PointT, pcl::Normal> ne;
pcl::SACSegmentationFromNormals<PointT, pcl::Normal> seg;
pcl::PCDWriter writer;
pcl::ExtractIndices<PointT> extract;
pcl::ExtractIndices<pcl::Normal> extract_normals;
pcl::search::KdTree<PointT>::Ptr tree (new pcl::search::KdTree<PointT> ());
// Datasets
pcl::PointCloud<PointT>::Ptr cloud (new pcl::PointCloud<PointT>);
pcl::PointCloud<PointT>::Ptr cloud_filtered (new pcl::PointCloud<PointT>);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals (new pcl::PointCloud<pcl::Normal>);
pcl::PointCloud<PointT>::Ptr cloud_filtered2 (new pcl::PointCloud<PointT>);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2 (new pcl::PointCloud<pcl::Normal>);
pcl::ModelCoefficients::Ptr coefficients_plane (new pcl::ModelCoefficients), coefficients_cylinder (new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers_plane (new pcl::PointIndices), inliers_cylinder (new pcl::PointIndices);
// Read in the cloud data
reader.read ("table_scene_mug_stereo_textured.pcd", *cloud);
std::cerr << "PointCloud has: " << cloud->size () << " data points." << std::endl;
// 只保留z轴方向上[0,1.5]内的点
pass.setInputCloud (cloud);
pass.setFilterFieldName ("z");
pass.setFilterLimits (0, 1.5);
pass.filter (*cloud_filtered);
std::cerr << "PointCloud after filtering has: " << cloud_filtered->size () << " data points." << std::endl;
// Estimate point normals
ne.setSearchMethod (tree);
ne.setInputCloud (cloud_filtered);
ne.setKSearch (50);
ne.compute (*cloud_normals);
/*========== 平面分割 ==========*/
// 创建平面分割模型对象并设置参数
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_NORMAL_PLANE);
seg.setNormalDistanceWeight (0.1);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setMaxIterations (100);
seg.setDistanceThreshold (0.03);
seg.setInputCloud (cloud_filtered);
seg.setInputNormals (cloud_normals);
// 获得平面模型内部点和模型参数
seg.segment (*inliers_plane, *coefficients_plane);
std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;
// 提取并保存点云中属于平面的内部点
extract.setInputCloud (cloud_filtered);
extract.setIndices (inliers_plane);
extract.setNegative (false);
pcl::PointCloud<PointT>::Ptr cloud_plane (new pcl::PointCloud<PointT> ());
extract.filter (*cloud_plane);
std::cerr << "PointCloud representing the planar component: " << cloud_plane->size () << " data points." << std::endl;
writer.write ("table_scene_mug_stereo_textured_plane.pcd", *cloud_plane, false);
/*========== 圆柱形分割 ==========*/
// 去掉属于平面模型的内部点
extract.setNegative (true);
extract.filter (*cloud_filtered2);
extract_normals.setNegative (true);
extract_normals.setInputCloud (cloud_normals);
extract_normals.setIndices (inliers_plane);
extract_normals.filter (*cloud_normals2);
// 创建圆柱体分割对象并设置参数
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_CYLINDER);
seg.setMethodType (pcl::SAC_RANSAC);
seg.setNormalDistanceWeight (0.1); // 曲面法线的影响权重设置为0.1的
seg.setMaxIterations (10000);
seg.setDistanceThreshold (0.05); //每个内点到模型的距离阈值:5cm。
seg.setRadiusLimits (0, 0.1); // 将圆柱形模型的半径限制为小于10厘米
seg.setInputCloud (cloud_filtered2);
seg.setInputNormals (cloud_normals2);
// 获得圆柱模型内部点和模型参数
seg.segment (*inliers_cylinder, *coefficients_cylinder);
std::cerr << "Cylinder coefficients: " << *coefficients_cylinder << std::endl;
// 提取并保存cloud_filtered2中属于圆柱模型的内部点
extract.setInputCloud (cloud_filtered2);
extract.setIndices (inliers_cylinder);
extract.setNegative (false);
pcl::PointCloud<PointT>::Ptr cloud_cylinder (new pcl::PointCloud<PointT> ());
extract.filter (*cloud_cylinder);
if (cloud_cylinder->points.empty ())
std::cerr << "Can't find the cylindrical component." << std::endl;
else
{
std::cerr << "PointCloud representing the cylindrical component: " << cloud_cylinder->size () << " data points." << std::endl;
writer.write ("table_scene_mug_stereo_textured_cylinder.pcd", *cloud_cylinder, false);
}
return (0);
}
CMakeLists.txt
cmake_minimum_required(VERSION 3.5 FATAL_ERROR)
project(cylinder_segmentation)
find_package(PCL 1.2 REQUIRED)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable (cylinder_segmentation cylinder_segmentation.cpp)
target_link_libraries (cylinder_segmentation ${PCL_LIBRARIES})
数据样例
./cylinder_segmentation
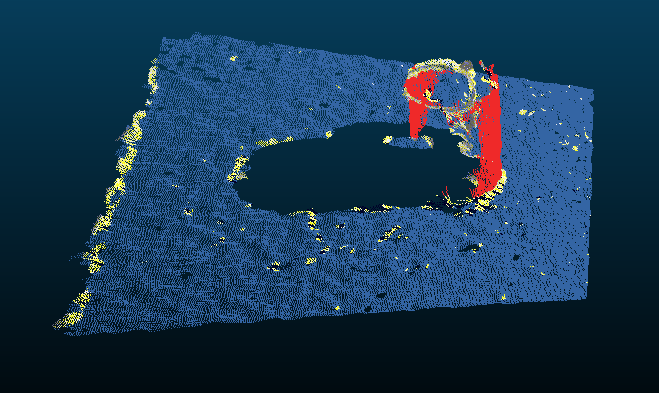
红点和蓝点为分割结果