学习目的:采用旧字符设备测试linux系统点灯,进一步熟悉其设计原理。采用多文件参与编译,深度学习编写Makefile,有利于实现驱动模块化设计。
1、创建MyOldLED目录
输入“cd /home/zgq/linux/Linux_Drivers/回车”
切换到“/home/zgq/linux/Linux_Drivers/”目录
输入“ls回车”查看“/home/zgq/linux/Linux_Drivers/”目录的文件和文件夹
输入“mkdir MyOldLED回车”,创建MyOldLED目录
切换到“/home/zgq/linux/Linux_Drivers/MyOldLED/”目录
输入“ls回车”查看“/home/zgq/linux/Linux_Drivers”目录的文件和文件夹

2、新建LEDInterface.c
打开虚拟机上“VSCode”,点击“文件”,点击“打开文件夹”,点击“zgq”,点击“linux”,点击“Linux_Drivers”,点击“MyOldLED”。点击“文件”,点击“新建文件”,点击“文件”,点击“另存为”。然后在“名称”右边的文本框中输入“LEDInterface.c”,点击“保存”
LEDInterface.c文件内容如下:
#include "LED.h"
#include <linux/types.h>
/*
数据类型重命名
使能bool,u8,u16,u32,u64, uint8_t, uint16_t, uint32_t, uint64_t
使能s8,s16,s32,s64,int8_t,int16_t,int32_t,int64_t
*/
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/string.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#define led_MAJOR 200
/*
定义主设备号
静态分配设备号:在串口输入“cat/proc/devices”查询当前已用的主设备号
然后使用一个“没有被使用的设备号”作为该设备的的主设备号
*/
#define led_NAME "ledName" //定义设备的名字
/* 打开设备 */
static int led_open(struct inode *inode, struct file *filp)
{
int ret = 0;
//printk("led_open!\r\n");
return ret;
}
/* 向设备写数据,将数据块首地址为buf的数据,长度为cnt个字节,发送给用户 */
//file结构指针变量flip表示要打开的设备文件
//buf表示用户数据块的首地址
//cnt表示用户数据的长度,单位为字节
//loff_t结构指针变量offt表示“相对于文件首地址的偏移”
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int ret = 0;
unsigned char databuf[1];
unsigned char ledstat;
ret = copy_from_user(databuf, buf, cnt);
if(ret <0){
printk("kernel write failed!\r\n");
ret = -EFAULT;
}
ledstat = databuf[0];/*获取到应用传递进来的开关灯状态*/
led_switch(ledstat);/*执行开灯或执行关灯*/
return ret;
}
/* 关闭/释放设备 */
static int led_release(struct inode *inode, struct file *filp)
{
int ret=0;
printk("led_release!\r\n");
return ret;
}
/*声明file_operations结构变量MyCharDevice_fops*/
/*它是指向设备的操作函数集合变量*/
const struct file_operations led_fops = {
.owner = THIS_MODULE,
.open = led_open,
.write = led_write,
.release = led_release,
};
/*驱动模块的入口函数 */
static int __init led_init(void)
{
int ret=0;
/* 1、寄存器地址映射 */
led_ioremap();//寄存器地址映射
led_Pin_Init();//LED灯引脚初始化
printk("led_init!\r\n");
ret = register_chrdev(led_MAJOR, led_NAME, &led_fops);
//注册字符设备
//led_MAJOR为主设备号,采用宏led_NAME定义设备名字
//led_fops是设备的操作函数集合,它是file_operations结构变量
if (ret < 0)
{
printk("CharDeviceDriver register failed!!!\r\n");
goto faile_register;
}
return 0;
faile_register:
return -EIO;
}
/*驱动模块的出口函数 */
static void __exit led_exit(void)
{
/* 1、取消寄存器地址映射 */
led_iounmap();
printk("led_exit!\r\n");
unregister_chrdev(led_MAJOR, led_NAME);
//注销字符设备
//led_MAJOR为主设备号,采用宏led_NAME定义设备名字
}
module_init(led_init);
//加载“驱动模块”:指定led_init()为驱动入口函数
module_exit(led_exit);
//卸载“驱动模块”:指定led_exit()为驱动出口函数
MODULE_AUTHOR("Zhanggong");//添加作者名字
MODULE_LICENSE("GPL");//LICENSE采用“GPL协议”
MODULE_INFO(intree,"Y");
//去除显示“loading out-of-tree module taints kernel.”
3、新建LED.c
LED.c文件内容如下:
#include "LED.h"
#include <linux/module.h>
/* 映射后的寄存器虚拟地址指针 */
static void __iomem *MPU_AHB4_PERIPH_RCC_PI;
/*RCC_MP_AHB4ENSETR寄存器*/
static void __iomem *GPIOI_MODER_PI; /*GPIOx_MODER寄存器,x=A to K, Z*/
static void __iomem *GPIOI_OTYPER_PI;/*GPIOx_OTYPER,x=A to K,Z*/
static void __iomem *GPIOI_OSPEEDR_PI;/*GPIOx_OSPEEDR,x=A to K, Z*/
static void __iomem *GPIOI_PUPDR_PI; /*GPIOx_PUPDR,x=A to K, Z*/
static void __iomem *GPIOI_BSRR_PI;/*GPIOx_BSRR,x=A to K, Z*/
void led_ioremap(void);
void led_iounmap(void);
void led_Pin_Init(void);
void led_switch(u8 sta);
/* 寄存器地址映射 */
void led_ioremap(void)
{
MPU_AHB4_PERIPH_RCC_PI = ioremap(RCC_MP_AHB4ENSETR, 4);
GPIOI_MODER_PI = ioremap(GPIOI_MODER, 4);
GPIOI_OTYPER_PI = ioremap(GPIOI_OTYPER, 4);
GPIOI_OSPEEDR_PI = ioremap(GPIOI_OSPEEDR, 4);
GPIOI_PUPDR_PI = ioremap(GPIOI_PUPDR, 4);
GPIOI_BSRR_PI = ioremap(GPIOI_BSRR, 4);
}
/*取消“寄存器地址映射”*/
void led_iounmap(void)
{
iounmap(MPU_AHB4_PERIPH_RCC_PI);
iounmap(GPIOI_MODER_PI);
iounmap(GPIOI_OTYPER_PI);
iounmap(GPIOI_OSPEEDR_PI);
iounmap(GPIOI_PUPDR_PI);
iounmap(GPIOI_BSRR_PI);
}
void led_Pin_Init(void)
{
u32 val = 0;
/* 2、使能RCC时钟 */
val = readl(MPU_AHB4_PERIPH_RCC_PI);/* 读RCC_MP_AHB4ENSETR寄存器 */
val &= ~(0X1 << 8);/* 清除以前的bit8设置 */
val |= (0X1 << 8); /* 设置新的bit8值 */
writel(val, MPU_AHB4_PERIPH_RCC_PI);
/* 将val的值写入RCC_MP_AHB4ENSETR寄存器 */
/* 3、将PI0输出引脚。*/
val = readl(GPIOI_MODER_PI);/*读GPIOI_MODER寄存器*/
val &= ~(0X3 << 0); /* bit0:1清零 */
val |= (0X1 << 0); /* bit0:1设置01,配置为输出模式 */
writel(val, GPIOI_MODER_PI);
/* 将val的值写入GPIOI_MODER寄存器 */
/* 4、设置PI0为推挽模式 */
val = readl(GPIOI_OTYPER_PI);/*读GPIOI_OTYPER寄存器*/
val &= ~(0X1 << 0); /* bit0清零,设置为上拉*/
writel(val, GPIOI_OTYPER_PI);
/* 将val的值写入GPIOI_OTYPER寄存器 */
/* 5、设置PI0为高速 */
val = readl(GPIOI_OSPEEDR_PI);/*读GPIOI_OSPEEDR寄存器*/
val &= ~(0X3 << 0); /* bit0:1 清零 */
val |= (0x3 << 0); /* bit0:1 设置为11,极高速*/
writel(val, GPIOI_OSPEEDR_PI);
/* 将val的值写入GPIOI_OSPEEDR寄存器 */
/* 6、设置PI0为上拉。*/
val = readl(GPIOI_PUPDR_PI);/*读GPIOI_PUPDR寄存器*/
val &= ~(0X3 << 0); /* bit0:1 清零*/
val |= (0x1 << 0); /*bit0:1 设置为01,配置为上拉*/
writel(val,GPIOI_PUPDR_PI);
/* 将val的值写入GPIOI_PUPDR寄存器 */
/* 6、默认打开LED,PI0=0 */
val = readl(GPIOI_BSRR_PI);/*读GPIOI_BSRR寄存器*/
val &= ~(0X1 << 16); /* bit16 清零*/
val |= (0x1 << 16); /*bit16 设置为1,令PI0输出低电平*/
writel(val, GPIOI_BSRR_PI);
/* 将val的值写入GPIOI_BSRR寄存器 */
/* 6、默认关闭LED,PI0=1 */
val = readl(GPIOI_BSRR_PI);/*读GPIOI_BSRR寄存器*/
val &= ~(0X1 << 0); /* bit0 清零*/
val |= (0x1 << 0);/*bit0 设置为1,令PI0输出高电平*/
writel(val, GPIOI_BSRR_PI);
/* 将val的值写入GPIOI_BSRR寄存器 */
}
void led_switch(u8 sta)
{
u32 val = 0;
if(sta == LEDON) {
val = readl(GPIOI_BSRR_PI);/*读GPIOI_BSRR寄存器*/
val &= ~(0X1 << 16); /* bit16 清零*/
val |= (0x1 << 16); /*bit16 设置为1,令PI0输出低电平*/
writel(val, GPIOI_BSRR_PI);
/* 将val的值写入GPIOI_BSRR寄存器 */
}
else if(sta == LEDOFF) {
val = readl(GPIOI_BSRR_PI);/*读GPIOI_BSRR寄存器*/
val &= ~(0X1 << 0); /* bit0 清零*/
val |= (0x1 << 0);/*bit0 设置为1,令PI0输出高电平*/
writel(val, GPIOI_BSRR_PI);
/* 将val的值写入GPIOI_BSRR寄存器 */
}
}
4、新建LED.h
LED.h文件如下:
#ifndef __LED_H
#define __LED_H
#include <linux/types.h>
/*
数据类型重命名
使能bool,u8,u16,u32,u64, uint8_t, uint16_t, uint32_t, uint64_t
使能s8,s16,s32,s64,int8_t,int16_t,int32_t,int64_t
*/
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/* 寄存器物理地址 */
#define PERIPH_BASE (0x40000000)
#define MPU_AHB4_PERIPH_BASE (PERIPH_BASE + 0x10000000)
#define RCC_BASE (MPU_AHB4_PERIPH_BASE + 0x0000)
#define RCC_MP_AHB4ENSETR (RCC_BASE + 0XA28)
#define GPIOI_BASE (MPU_AHB4_PERIPH_BASE + 0xA000)
#define GPIOI_MODER (GPIOI_BASE + 0x0000)
#define GPIOI_OTYPER (GPIOI_BASE + 0x0004)
#define GPIOI_OSPEEDR (GPIOI_BASE + 0x0008)
#define GPIOI_PUPDR (GPIOI_BASE + 0x000C)
#define GPIOI_BSRR (GPIOI_BASE + 0x0018)
extern void led_ioremap(void);
extern void led_iounmap(void);
extern void led_Pin_Init(void);
extern void led_switch(u8 sta);
#endif
5、新建LED_APP.c
LED_APP.c文件内容如下:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
//APP运行命令:./LED_APP MyLED 1表示打开LED
//APP运行命令:./LED_APP MyLED 0表示关闭LED
#define LEDOFF 0 /* 关灯 */
#define LEDON 1 /* 开灯 */
/*
参数argc: argv[]数组元素个数
参数argv[]:是一个指针数组
返回值: 0 成功;其他 失败
*/
int main(int argc, char *argv[])
{
int fd, retvalue;
char *filename;
unsigned char databuf[1];
if(argc != 3)
{
printf("Error Usage!\r\n");
return -1;
}
//argv[]是指向输入参数“./LED_App” “/dev/MyLED” “1”
filename = argv[1];
//argv[1]指向字符串“/dev/MyLED”
fd = open(filename, O_RDWR);
//如果打开“/dev/LED”文件成功,则fd为“文件描述符”
//fd=0表示标准输入流; fd=1表示标准输出流;fd=2表示错误输出流;
if(fd < 0)
{
printf("Can't open file %s\r\n", filename);
return -1;
}
databuf[0]= atoi(argv[2]); /* 写入的数据,是数字的,表示打开或关闭 */
retvalue = write(fd, databuf, 1);
//将databuf[]中前1个字节发送给用户
//返回值大于0表示写入的字节数;
//返回值等于0表示没有写入任何数据;
//返回值小于0表示写入失败
if(retvalue < 0)
{
printf("write file %s failed!\r\n", filename);
close(fd);
//fd表示要关闭的“文件描述符”
//返回值等于0表示关闭成功
//返回值小于0表示关闭失败
return -1;
}
/* 关闭设备 */
retvalue = close(fd);
//fd表示要关闭的“文件描述符”
//返回值等于0表示关闭成功
//返回值小于0表示关闭失败
if(retvalue < 0)
{
printf("Can't close file %s\r\n", filename);
return -1;
}
return 0;
}
6、新建Makefile
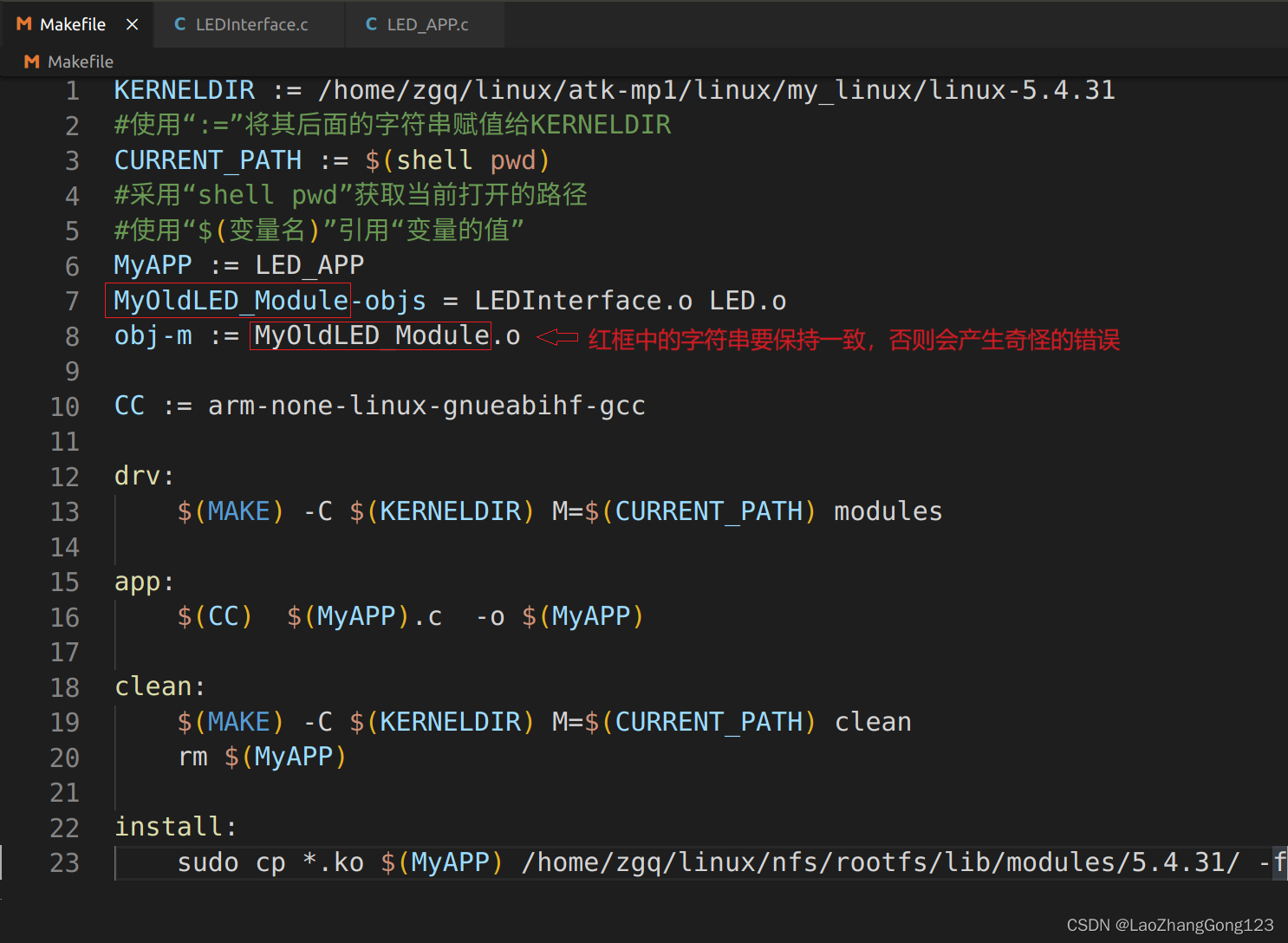
Makefile文件如下:
KERNELDIR := /home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31
#使用“:=”将其后面的字符串赋值给KERNELDIR
CURRENT_PATH := $(shell pwd)
#采用“shell pwd”获取当前打开的路径
#使用“$(变量名)”引用“变量的值”
MyAPP := LED_APP
MyOldLED_Module-objs = LEDInterface.o LED.o
obj-m := MyOldLED_Module.o
CC := arm-none-linux-gnueabihf-gcc
drv:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
app:
$(CC) $(MyAPP).c -o $(MyAPP)
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
rm $(MyAPP)
install:
sudo cp *.ko $(MyAPP) /home/zgq/linux/nfs/rootfs/lib/modules/5.4.31/ -f
7、添加“c_cpp_properties.json”
按下“Ctrl+Shift+P”,打开VSCode控制台,然后输入“C/C++:Edit Configurations(JSON)”,打开以后会自动在“.vscode ”目录下生成一个名为“c_cpp_properties.json” 的文件。
修改c_cpp_properties.json内容如下所示:
{
"configurations": [
{
"name": "Linux",
"includePath": [
"${workspaceFolder}/**",
"/home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31", "/home/zgq/linux/Linux_Drivers/MyOldLED", "/home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31/arch/arm/include", "/home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31/include", "/home/zgq/linux/atk-mp1/linux/my_linux/linux-5.4.31/arch/arm/include/generated"
],
"defines": [],
"compilerPath": "/usr/bin/gcc",
"cStandard": "gnu11",
"cppStandard": "gnu++14",
"intelliSenseMode": "gcc-x64"
}
],
"version": 4
}
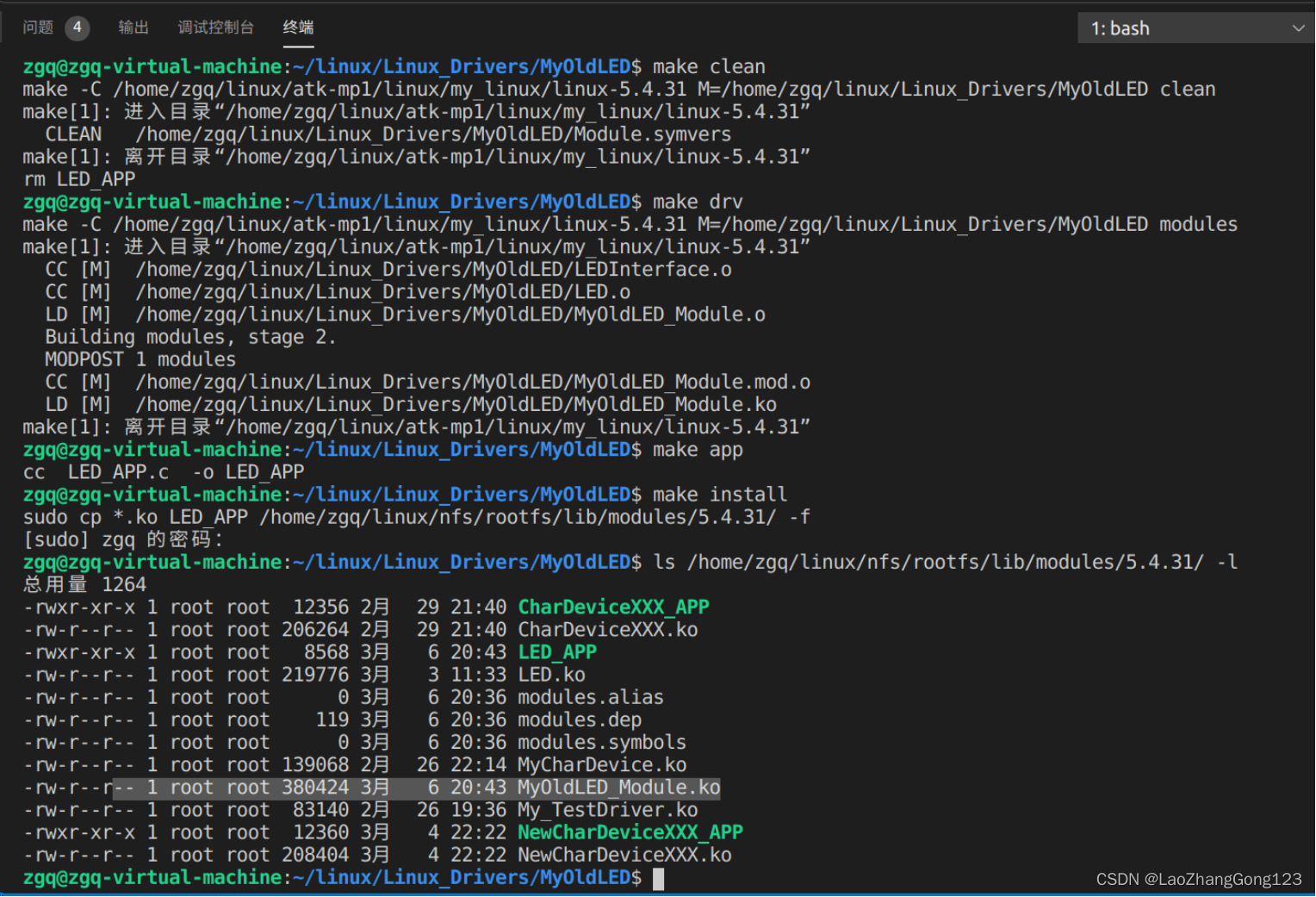
8、编译
输入“make clean回车”
输入“make drv回车”
输入“make app回车”
输入“make install回车”
输入“ls /home/zgq/linux/nfs/rootfs/lib/modules/5.4.31/ -l回车”产看是存在“LED_APP和MyOldLED_Module.ko”
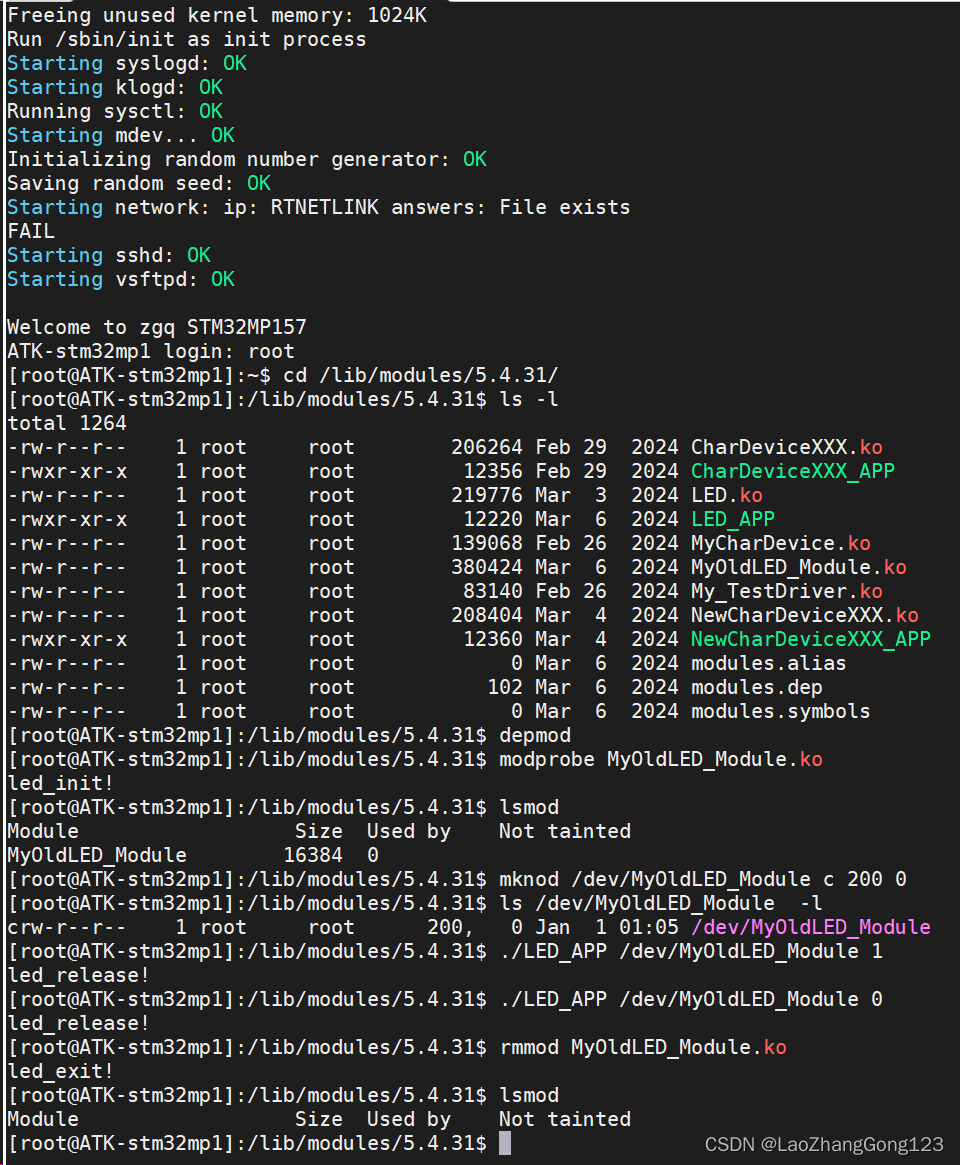
9、测试
启动开发板,从网络下载程序
输入“root”
输入“cd /lib/modules/5.4.31/回车”
切换到“/lib/modules/5.4.31/”目录
注意:“lib/modules/5.4.31/”在虚拟机中是位于“/home/zgq/linux/nfs/rootfs/”目录下,但在开发板中,却是位于根目录中。
输入“ls -l”查看“LED_APP和MyOldLED_Module.ko”是否存在
输入“depmod”,驱动在第一次执行时,需要运行“depmod”
输入“modprobe MyOldLED_Module.ko”,加载“MyOldLED_Module.ko”模块
输入“lsmod”查看有哪些驱动在工作
输入“mknod /dev/MyOldLED_Module c 200 0回车”
//“mknod”是创建节点命令
//“/dev/MyOldLED_Module”表示节点文件
//“c”表示LED是个字符设备
//“200”表示设备的主设备号
//“0”表示设备的次设备号
输入“ls /dev/MyOldLED_Module -l回车”,
发现节点文件“/dev/MyOldLED_Module”
输入“./LED_APP /dev/MyOldLED_Module 1回车”执行写1开灯
输入“./LED_APP /dev/MyOldLED_Module 0回车”执行写0关灯
操作完成,则执行卸载模块:
输入“rmmod MyOldLED_Module.ko”,卸载“MyOldLED_Module.ko”模块
注意:输入“rmmod MyOldLED_Module”也可以卸载“MyOldLED_Module.ko”模块
输入“lsmod”查看有哪些驱动在工作。
搞了一天才搞好,网上这方面的资料很少。如果Makeile写错了,就搞不好了。