Paper题目:Mobile Laser Scanning for Estimating Tree Stem Diameter Using Segmentation and Tree Spine Calibration
Abstract
移动激光扫描 (MLS) 可以通过使用自动推导出树干中心位置和树干直径的算法来提高森林清查效率。在这项工作中,我们提出了一种基于从激光数据中导出的树刺来校准激光返回位置的新方法。对顺序激光扫描进行了第一次位置校准,并且在分割后可以进一步校准激光返回,其中激光返回与单个树干相关联。分割使得对树干脊柱(即树干的中心线)建模成为可能。连贯树脊位置的假设用于校正树干上的激光返回位置,从而改进对树干轮廓的估计(即,从地面不同高度的树干直径)。该方法在六个 20 米半径的地块上进行了验证。对于安全连接的树木(最大连接距离为 0.5 m),通过1cm的均方根误差 (RMSE) 来估计茎直径,并限制来自高度间隔的最小数据量以支持圆估计。由于小树的影响很小(即单棵树的聚集),断面积加权平均茎直径(相对 RMSE 3.4%)和断面面积(相对 RMSE 8.5%)的地块级估计精度很高。由于来自全球导航卫星系统的冠层下方信号受到干扰,脊柱校准还可以从传感器位置计算出的 3D 激光数据中导出 3D 茎轮廓,这些数据具有很大的误差。
Keywords: tree map; SLAM; forest inventory; personal laser scanner; MLS
1. Introduction
今天使用的提供客观估计的森林清查方法是基于对样本地块上树干直径的手动测量。然而,能够测量 3D 周围环境的地面激光扫描可用于森林清查的自动化。带有放置在三脚架上的传感器和用于测量几乎每个方向的距离的扫描机构的固定激光扫描通常称为地面激光扫描 (TLS)。由于观察时间长,从一个视点(单次扫描)使用 TLS 进行测量将产生高密度 3D 点云。没有由扫描仪移动引起的位置误差将产生高精度的 3D 点云。生成的 3D 数据可用于树干建模 [1]。与 TLS 相比,用于树木测量的移动激光扫描 (MLS) 设备具有多项优势。视点的轨迹将增加检测到靠近扫描仪的树木的可能性,因为从扫描仪的所有视点来看,其他树木很少会出现在视线范围内。此外,测量不限于样地,因为数据是连续收集的 [2]。一个挑战是估计计算 3D 点云所需的传感器轨迹。对于空旷区域,可以通过结合使用全球导航卫星系统 (GNSS) 和惯性测量单元 (IMU) 的惯性导航系统 (INS) 得出位置,但这种方法在卫星信号不佳的区域无法正常工作阻塞或干扰。在卫星信号较差的地区可以使用同步定位和地图构建 (SLAM) 算法。由于在许多方向上定义明确的平面,这些算法对于室内应用通常是有效的,但在具有更复杂几何形状的室外环境中,问题变得更加困难。对于室外环境,已经开发出 SLAM 算法,该算法使用遍历环境的几何形状而不需要高精度惯性测量 [3,4]。
位置校准算法也已针对森林环境进行了定制。在芬兰,来自树木的激光数据被用作 SLAM 算法的参考,并结合来自测量级 IMU 的姿态数据,产生了 0.32 m 的位置误差,比仅使用 IMU 结合 GNSS 数据好 38% .然而,在树木稀少的开阔地区使用 SLAM 并不成功 [5]。在这项研究之后,基于来自树木的激光扫描仪数据的 SLAM 方法得到了验证,该方法得到了来自 GNSS/INS 的航向和速度数据的帮助,将轨迹的总位置误差减少到 6 厘米 [6]。
在芬兰的另一项研究中,使用树干作为特征应用来自 GNSS 和 IMU 数据的初始轨迹的图形 SLAM 校准,这产生了激光数据的内部一致性,标准偏差小于 1 厘米,位置精度优于 6 厘米[7].同样的系统被用于估计 23 个田间地块的树干属性。分别估计从不同位置扫描的单个树干,并选择具有最长估计树干轮廓的版本作为估计结果[8]。
在挪威,使用具有 16 个激光器、绕垂直轴 360° 扫描并具有 ±15° 垂直视野的激光扫描仪来估计树木位置和树干直径。这些估计在 250 平方米的田间地块上得到验证,并将结果与 18 棵树中检测到的 14 棵树的人工测量值进行了比较。树干位置中心和树干半径是通过单个扫描旋转的圆拟合来估计的。使用迭代最近点算法校正树中心的位置。使用聚类圆拟合估计估计标准高度(1.3 m)的茎直径,同时假设直径沿树茎不断减小,并使用从激光扫描仪系统获得的数字高程模型对激光数据进行高度归一化机载激光扫描仪数据 [9]。
在挪威的另一项研究中,使用了类似的算法,但在背包上安装了两个激光扫描仪,一个水平的用于树木测量,另一个垂直的用于地面高程测量。对七块 500 平方米田间地块上的单棵树进行人工测量,对树干直径的估计进行了验证。与使用单次扫描 TLS 数据和手持式激光扫描仪相比,背负式激光扫描仪产生的茎直径估计误差更低 [10]。
本研究中介绍的系统包括(1)一个提供传感器轨迹初始估计的定位系统,(2)一个使用多个激光器操作的激光扫描仪,每个激光器相对于扫描仪的水平面以不同的角度分开,( 3) 使用周围物体的激光测量来校准初始传感器轨迹的算法,以及 (4) 估计树木位置和树干直径的算法。在早期的工作中,测试了相同的系统,但可以结合使用低成本 IMU、立体相机和激光扫描仪 [11] 来估计树干位置和树干直径。在本文中,对算法进行了更详细的描述,提出了使用树脊的方法的进一步改进,并在没有立体相机的情况下估计了初始轨迹。使用具有更复杂森林的不同测试区域进行验证。目标是 (1) 开发用于校准移动激光扫描仪数据的算法,该算法也适用于困难的森林环境,(2) 开发用于树干直径估计的算法,以及 (3) 在瑞典北部的森林地块上验证这些算法.
2. Material
2.1. Laser Scanner
激光扫描仪是 Velodyne VLP-16。扫描仪包含 16 个激光器,它们以每秒 10 转的速度围绕扫描仪的垂直轴旋转 360°。相邻的激光器相隔 2°,以覆盖相对于扫描仪水平面的 ±15 度扇区。激光扫描仪每秒发射大约 300,000 个脉冲。光束发散角为 0.18°。扫描仪相对于水平面向后倾斜 28°,以接收扫描仪附近地面上返回的激光。
2.2. Inertial Navigation System
惯性导航系统 (INS) 用于估计初始传感器轨迹和地理参考激光扫描仪数据。 INS 是配备了 GPS-702-GG 天线的 NovAtel SPAN-IGM-S1。 INS 数据使用 NovAtel Intertial Explorer 软件进行处理,其中包括使用来自瑞典国家参考系统 SWEPOS 的数据对传感器轨迹进行过滤和随后对 GNSS 数据进行校准。
2.3. Data Logging and Time Synchronization
激光扫描仪向计算机发送 10 Hz 用户数据报协议 (UDP) 数据,这些数据包包含点数据,包括时间戳、范围、强度、旋转和高度。 INS 数据使用 Python 脚本以 125 Hz 的频率记录。激光扫描仪有一个内部时钟,可用于为激光数据打上时间戳,但该时钟应与 INS 系统使用的 GNSS 时间同步。因此,包含时间的消息从 INS 发送到激光扫描仪。同步使得在从激光扫描仪发送到计算机的 UDP 数据包中获取 GNSS 时间戳成为可能。时间戳可用于将来自扫描仪的激光范围与来自 INS 的扫描仪的位置和方向估计连接起来,从而能够在全球坐标系中计算 3D 点云。
2.4. Validation Data
该系统在位于瑞典北部 Krycklan 河流域(纬度 64°140 N,经度 19°460 E)的试验场进行了验证。在其他项目中已经设置了 80 m x 80 m 的田地。在这些地块上,使用静态地面激光扫描(TLS,Trimble TX8)和使用卡尺手动测量 DBH ≥ 4 的树木的树木位置和胸高 1.3 m 处的树干直径(DBH)厘米。每个 80 m x 80 m 的地块都是用来自 4 x 4 个扫描站的 TLS 测量的,放置在每个网格节点之间大约 20 m 的网格上。来自扫描站的单个点云使用放置在相邻扫描站上的球体与共同配准合并,来自每个扫描站的 GNSS 测量使得将 TLS 坐标转换为全球坐标成为可能。检测树木并使用先前开发的算法 [12] 从 TLS 数据估计树干直径。 DBH 是使用集成了超声波三边测量系统(DP POSTEX,Haglöf Sweden AB)的数字卡尺手动测量的。超声波三边测量系统测量树木相对于地块中心的位置,但精度仅适用于短距离。因此,使用了 4 x 4 个子图,每个子图的中心都靠近扫描站。然后,使用早期开发的匹配算法 [13],将树木位置和 DBH 的手动测量自动链接到 TLS 测量的树木位置的空间模式,以获得也用于手动测量的全局坐标。
在本研究中,使用选定的六个田间地块验证了 MLS 系统对树木位置和 DBH 的估计,以便在小树的数量和树种组成方面有所变化。 MLS 系统在靠近大场图中心的 20 米半径的圆圈内进行了验证。使用以下轨迹:(1)首先沿着半圆的边界行走,(2)在最靠近第一个测量的半圆的中线一侧穿过圆,返回到圆所在的位置附近首先进入,(3)穿过与最后一条交叉线平行但在圆圈中线另一侧的半圆,以及(4)最后,沿着第二个半圆的边界行走,直到到达第一个圆的入口点(图 1)。这样,同一个地方从不同的方向测量,时间差不大。手动测量于 2016 年进行,MLS 测量于 2017 年进行。田地 1 由苏格兰松 (Pinus sylvestris) 和一层较小的挪威云杉 (Picea abies) 组成,田地 2 由高大的挪威云杉树组成,田地 3 由苏格兰松树和稀疏的低植被组成,田地 4 包含苏格兰松树和挪威云杉的混合物,以及小型挪威云杉树的密集区域,田地 5 是一个平坦的区域,有苏格兰松树,几乎没有低植被,并且田地 6 包含苏格兰松树、挪威云杉和落叶树的混合物(图 2)。
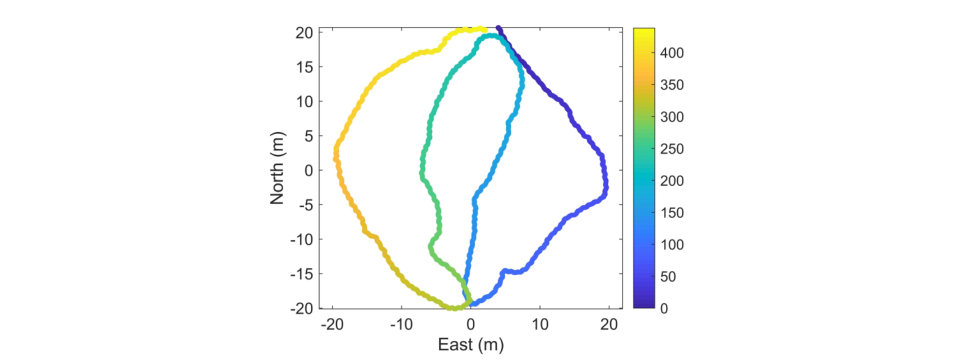
图 1. 一个场图上的传感器轨迹。颜色代码代表时间(秒)。

图 2. 用于验证的田间地块图像。
3. Methods
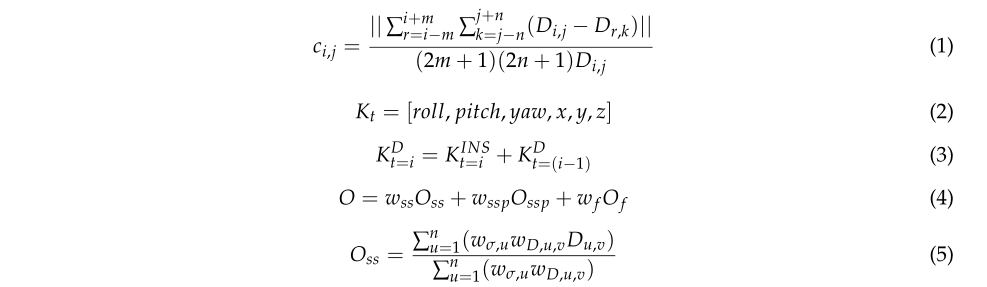
激光返回的位置首先使用动态校准进行校正,每次扫描都使用传感器姿态配准,使用来自先前传感器扫描的数据,并支持从树木和地面提取的特征。对于每次扫描,圆拟合来自树干上的激光返回。圆拟合(茎部分)的中心位置用于通过搜索线性对象(即茎中心的线性结构)来分割数据,以便将茎部分与单个树木关联起来。然后将树干部分与一根树干的关联用于树脊校准,以便微调估计树干轮廓所需的激光返回位置。在这项研究中,树脊被定义为树干的中心,从地面向上延伸。茎直径以两种方式估算,使用直径-高度函数:(1) 将函数拟合到单个扫描旋转的圆拟合,以及 (2) 使用来自茎轮廓的圆拟合和来自多次扫描旋转的 3D 数据,从而包括传感器位置误差。图 3 概述了激光数据的校准方法和树干属性的估计,并在以下小节中进行了描述。除了动态校准、基于水平对象的校准和基于垂直对象的校准之外,流程图左侧的算法早先已被简要描述 [11],最近也对这些算法进行了更详细的描述 [14]。
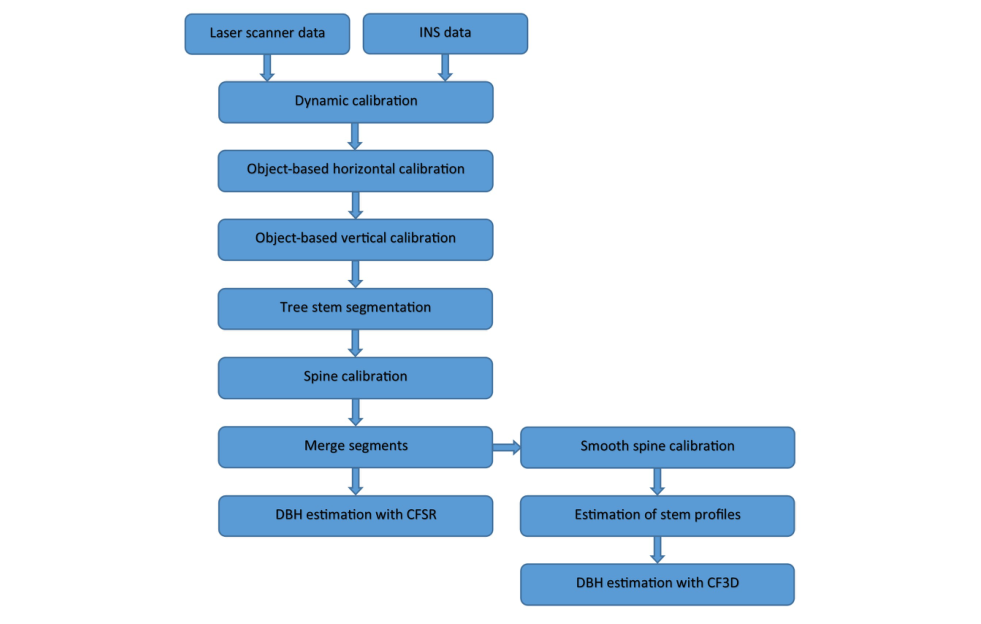
图 3. 该方法的流程图。
3.1. Dynamic Calibration
在此校准步骤中,对单个扫描旋转执行了六自由度(6 DOF:x、y、z、滚动、俯仰、偏航)校准。动态校准建立在以前的发展基础上,其中激光扫描仪安装在小型无人机 (UA V) [15,16] 上,该算法后来适用于森林内的人员携带传感器采集 [14]。 INS 给出的初始估计的传感器位姿数据是根据一次扫描旋转(每 0.1 秒)的激光数据与早期扫描旋转的激光数据的比较进行调整的。对于动态校准以及后续步骤,从激光数据中提取特征。使用了两种特征类型:树干部分和平面。树干部分对应于从树的树干部分返回的 3D 激光数据。平面对应于从平面返回的 3D 激光数据,平面主要包括森林中的部分地面。
第一步,将 3D 点放在网格上以评估平滑度,其中行代表扫描仪演变,列代表旋转角度。局部平滑度评估的灵感来自 Zhang 和 Singh [4] 提出的方法。我们对平滑度计算的修改是,根据提取的特征类型,使用定义邻居的区域的不同形状和大小。对于该网格图像的每一行 i 和列 j,使用具有高度 (2(m + 1)) 和宽度 (2(n + 1)) 的区域,使用等式 (1) 计算平滑度值 c。为了检测茎段,使用了一个区域,当投影到物体上时,该区域对应于一个细长的矩形,高度为 3 行,宽度为 5 列(4° 仰角乘 1° 方位角)。为了检测地面上的平面,使用了一个区域,该区域大约对应于一个正方形,具有 5 行的高度和 41 列的宽度(8° 仰角 x 8° 方位角)。为了从多个方向安全地获取特征,定义了扫描仪旋转角度的四个扇区:向前(315° 至 45°)、向左(225° 至 315°)、向右(45° 至 135°)和向后(135°到 225°)。在每个扇区中,选择 c 最低的 30 个点进行进一步处理。
然后应用了几个过滤器,目的是只选择位于树干上的树特征点进行进一步处理。对于树木特征点,使用半方位角宽度等于最大预期树干半径 (0.3 m) 的感兴趣区域。对于每个感兴趣区域,从上层 (r = i + 1)、中层 (r = i) 和下层相邻 (r = i − 1) 高程水平(行)。在 P1、P2 和 P3 中,比较每列中的距离,如果绝对差异高于距离阈值 (>0.2 m),则删除点。在下一步中,通过要求行 r = i - 1 和 r = i + 1 上的点数据之间的最小高度差来拒绝地面点。然后分别将来自 Pr 的点拟合到水平面中的三个圆(x , y) 使用解析方法获得茎截面中心 (x, y)、茎半径和残差 (RMS) 的均方根。为了从例如分支中删除点,应用了 RMS 阈值(1.5 厘米)。如果 RMS 高于此阈值,则移除方位角方向两侧的外部点,并将减少的数据再次拟合到一个圆上,并根据新的 RMS 值接受或拒绝。这种去除茎段的程序是第一种去除可能包含分支点的茎段的方法。然而,如果在一次扫描仪旋转中的茎段太少,则应用第二个例程,逐步删除具有最高残差的点,并在每个步骤中将剩余的点拟合到一个圆上,直到 RMS 低于 1.5 厘米或点太少(<5) 保持不变。
从扫描旋转中提取和过滤的特征用于校准传感器姿态(等式(2))与从早期扫描旋转中获得的特征(等式(3)),其中 I NS 表示用于获得初始姿态的 INS 值D动态校准。两种不同的距离度量用于优化 6 DOF 中的最佳姿势:对于平面,点到平面的距离,对于茎部分,点到平面(到茎表面)距离和点到-线距离(到估计的阀杆中心位置)。 K 矩阵的值是通过最小化通过茎节 (ss)、茎节点 (ssp) 和平面 (f) 之间的距离的组合生成的目标函数(等式 (4))找到的。在等式中,权重 wss、wssp 和 wf 分别设置为 1.0、0.8 和 0.6。距离的不同加权平均值也用于在扫描旋转中对一种类型的特征进行加权(等式(5))。来自当前时间点 (u) 的特征与来自较早时间段 (v) 的已校准特征之间的距离 (Du,v) 用插入双平方函数的圆拟合估计的标准差 (wσ,u) 加权,以获得低标准偏差的高权重,并将茎向量投影距离插入双平方函数,以获得垂直树茎上小垂直差异的高权重。茎节点之间和单位之间的距离以类似的方式加权。为了优化传感器姿态,应用了修改后的最陡梯度法[17]。
3.2. Horizontal Object-Based Calibration
先前的动态校准步骤用于减少初始传感器轨迹的短时误差。但是,如果在一段时间后测量同一位置,小漂移也会成为一个问题,因为每棵树都会观察到多个估计值。解决方案是在更长的时间间隔内聚合树干部分,以形成初始树位置估计(简单树)。在此校准步骤中,仅在平面 (x, y) 中使用时间间隔内的平均树位置估计值进行调整。之所以从水平面平差开始,是因为树的中心分布在垂直方向,这使得可以先简化为一个二维平差问题。这些简单的树是按时间顺序处理的。为了解决小的残余位置误差,汇总了 10 次扫描旋转(1 秒的数据采集)的茎段,并进一步校正传感器位置以减少较长时间间隔内的累积误差。在此步骤中,与动态校准步骤中每次扫描仪旋转可用的茎部分数量相比,有更多的茎部分可用,并且这些茎部分用于调整相对于先前扫描旋转中已调整的简单树的位置。
在水平面 (1 m) 的搜索距离内搜索来自先前扫描旋转的邻居。使用搜索距离内所有可用的参考相邻茎节,计算水平面 (x, y) 中坐标的加权平均值,并选择单独的权重来衡量对应的重要性。使用 z(高度)的差异、圆拟合的 RMS 和茎半径的差异作为双平方函数的输入,以及时间差(年龄)作为具有截止的幂函数 (1.5) 的输入来计算权重。具有相邻位置值(参考)的位置和加权平均值的对用于估计相对于前一个时间间隔的每个(1 秒)时间间隔的水平面中的刚体变换。转换应用于时间间隔内的所有茎段。该算法已在前面进行了描述 [14]。
3.3. Vertical Object-Based Calibration
累积的误差会给地面高程模型的生成带来问题,因为如果返回同一地点,经过一段时间后测量同一区域会出现多个地面。因此,在水平面校准后,每个时间间隔都使用平面进行垂直校准。对于当前时间间隔内的每个公寓,在 8 m 的水平搜索半径内搜索先前时间间隔的参考公寓,并使用参考公寓内 z 值的加权平均值计算参考 z 值搜索半径,其中权重是距离的平方反比。这样,可以在公寓密度低的区域计算参考 z 值。此外,远距离的单个公寓对参考公寓密度高的区域内的 z 值平均值影响很小。年龄的加权平均值(即当前公寓和参考公寓之间的时间差)也使用参考公寓年龄的相同距离权重计算。然后使用这对平面,其中一对由当前时间间隔和先前时间间隔的相应参考 z 值组成,以计算 z 校准。校准是对当前时间间隔的一个平面和之前的时间间隔之间的z差对的加权平均,其中权重是年龄(即当前平面的时间和加权平均时间之间的时间差,以供参考公寓)。如果激光扫描仪返回到以前访问过的地方,则使用年龄可以调整到以前的地面水平。该算法已在前面进行了描述 [14]。
3.4. Tree Stem Segmentation
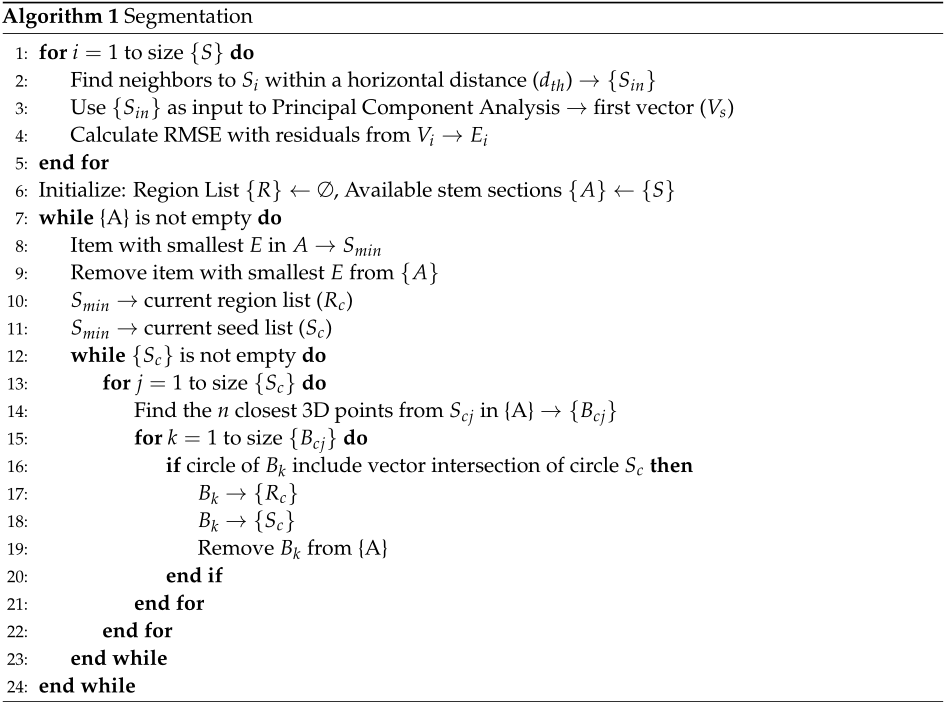
动态校准的茎部分源自单个扫描仪扫描的圆拟合,由中心坐标(x、y、z)和圆半径组成。分割的目的是将几个茎节与树干相关联以形成簇 ®。使用主成分分析 (PCA) 和中心坐标 (x , y, z) 的茎部分(即圆拟合中心)作为输入。根据 3D 线性估计的均方根误差 (RMSE),从树中心分布的最线性描述开始,将树干部分排序在列表中。如果关联的圆包含 3D 线性向量,则该段中包含另一个词干部分。重复此过程,直到不能将更多的茎段添加到当前起始段。添加到词干段的词干部分也从可用词干部分列表中删除。然后形成一个新的段,从列表中的下一个可用的词干部分开始。重复此过程,直到所有茎段都已添加到茎段 ®。该算法之前仅简要描述过 [11]。有关概述,请参见算法 1。
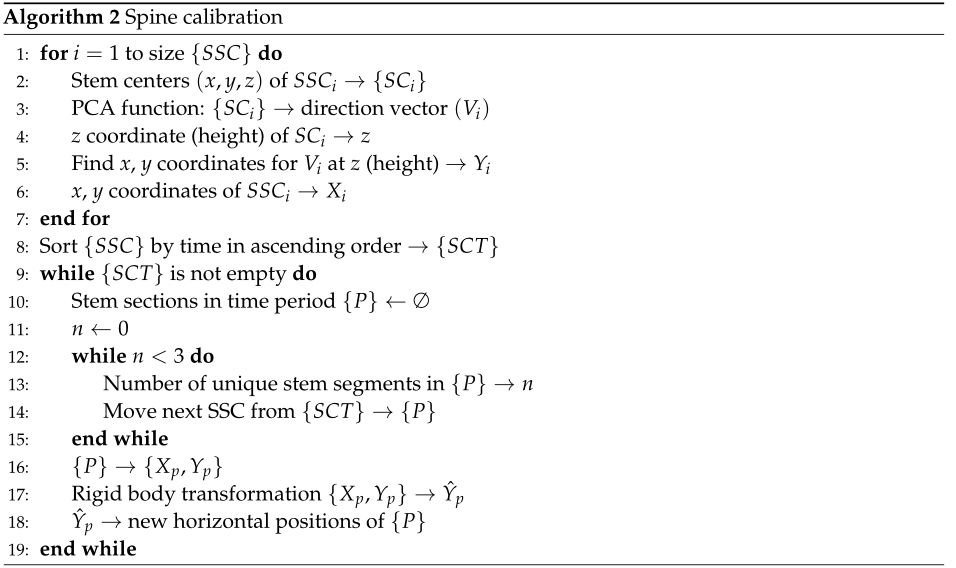
3.5. Spine Calibration
在此校准步骤中,树脊被假定为 3D 线。基于茎段根据茎分割属于特定茎的假设,调整了茎段中心的水平位置估计以消除系统误差。对于每个茎段,使用 PCA 从茎节中心估计 3D 线。这使得可以根据以下两个位置计算每个茎段的 x、y 坐标对:(1) 原始茎段中心位置 (xc, yc) 和 (2) 3D 线与 a 相交的位置包含原始茎节中心位置的水平面 (xs, ys)。然后按时间顺序对茎段进行分类。从数据采集开始,形成的时间间隔刚好足以包括来自至少三个不同茎段的茎段。通过在时间间隔 Yp (xs, ys) 内最小化茎截面中心坐标对 Xp (xc, yc) 和线-平面交点之间的水平欧几里得平方距离来完成水平面中的刚体变换。找到的变换(旋转矩阵,平移向量)用于在特定时间间隔内校正与茎节相关的茎点。这在从激光采集开始到停止的连续时间间隔内重复。该算法之前仅简要描述过 [11]。有关概述,请参见算法 2。
3.6. Merge Segments
在初始分割后,多个茎段可能属于同一棵树,例如由于树枝造成的阴影区域。因此,根据每个段的主要方向合并了茎段。使用段内的所有茎切点计算 PCA 以找到主方向,并计算与方向向量的偏差。将所有茎段相互比较。使用 z 方向最长树干段的方向向量。计算了方向矢量与由较短树干段的平均 z 值定义的水平面的交点。如果交点与较小线段点的平均水平坐标 (x, y) 的范围小于两个茎段的半径平均值之和,则将两个线段合并为一个。该算法之前仅简要描述过 [11]。
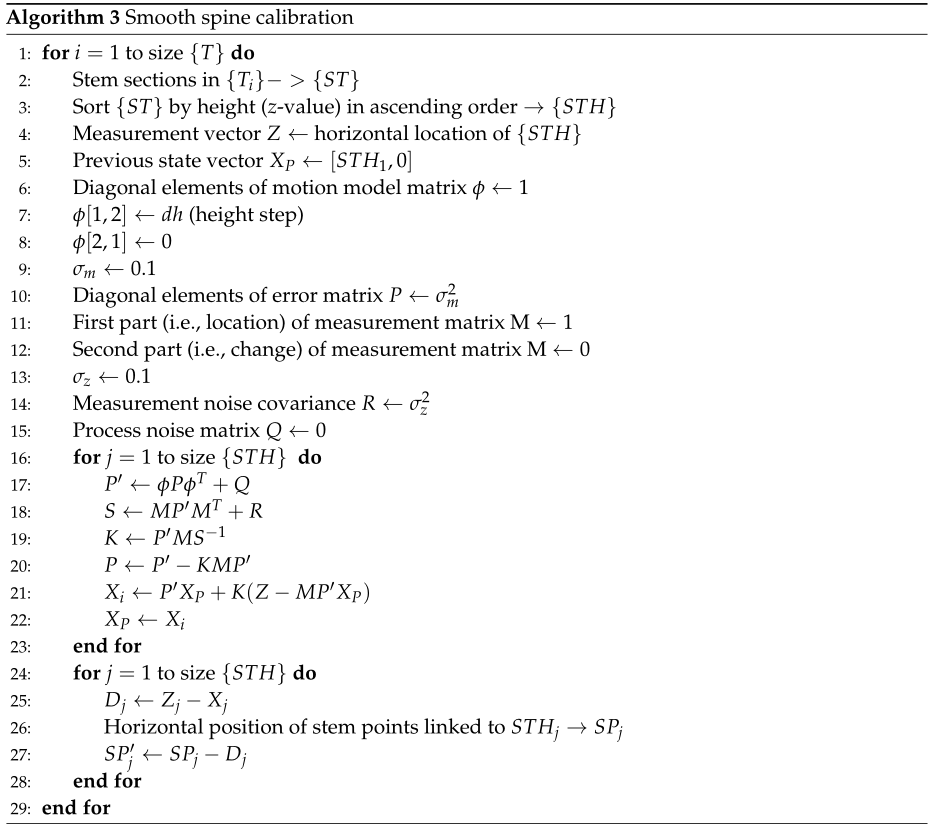
3.7. Smooth Spine Calibration
假设脊柱是平滑曲线(即,一个部分和相邻部分沿树干的方向相似),进一步校准了激光在树干上返回的位置。因此,从树干的最低测量部分到最高测量部分应用卡尔曼滤波器来估计平滑的树干脊柱。滤波器的初始估计是一个垂直指向的矢量和测量的特定误差。卡尔曼滤波器产生了一个平滑的弯曲脊柱,描述了测量区间所有高度(z 值)的树干中心位置。确定了与茎节相同高度(z 值)的茎节中心和估计的脊柱中心之间的水平距离(dx,dy)。然后使用该距离来校正与特定茎段相关的所有茎激光返回的位置。通过减去距离 (dx, dy) 来校正与茎段相关的激光返回的水平位置 (x, y)。对所有树干部分和相关的树干激光返回重复此过程。如果可以无误地估计脊柱位置,则校准应该消除系统误差。有关算法的概述,请参阅算法 3,其中 {T} 是具有树数据的项目列表,每个项目包含与树相关的茎段和茎点。平滑脊柱在第 16 到 23 行创建,校准在第 24 到 28 行完成。输出是具有更新的水平位置 (x, y) 的干点列表 {SP 0}。
3.8. Estimation of Stem Profiles
在前面的步骤中对茎段位置的校准用于推导包含在同一茎段中的激光返回的新位置。然后根据校正后的 3D 点数据(激光返回)估计不同高度的茎直径轮廓。使用圆形拟合估计值估计沿树干的 0.1 米高度部分的茎直径。如果高度部分至少包含最少数量的激光返回(>30 次测量),则进行一项估计。为了用稀疏测量值估计树干部分的茎干直径,从几个相邻高度间隔的激光返回从上方累积,并以 0.1 米的步长向下,直到获得最小数量的激光返回。调整了激光返回的位置以减少由不垂直的树干引起的误差:(1)计算了用于圆拟合的所有激光返回在平滑脊柱校准步骤中计算的茎中心的平均值,并且(2) 然后将此平均值与单个茎中心之间的差异用于单个激光返回的水平校准。然后使用卡尔曼滤波器平滑由适合高度部分的圆圈组成的茎轮廓。起点选择在估计的圆拟合的中值高度值处。选择中值高度作为起点,因为被测树干下部和上部的圆拟合被判断为具有最高误差,这是由于树干上的树枝更远,靠近地面的非圆形树干形状以及数据较少两端与被测树干的中间部分相比。导出高度部分与相邻高度部分之间的平均绝对差,并将其用作卡尔曼滤波器中圆拟合误差的估计,以便应用高度部分的单独权重。然后使用高于和低于估计值的平均值对起点处的茎直径估计值进行平滑处理,以获得较低和较高过滤估计值之间的平滑过渡。
3.9. Ground Elevation Model
地面的数字高程模型 (DEM) 使用已用于动态校准的平面创建,并在第 3.3 节中描述的校准后创建。这些点通常位于地面上,但有时也可能位于地面以上。只有标准偏差小于 0.1 m 且距传感器的距离小于 10 m 的平面才用于创建 DEM。通过首先选择 8 m 半径内的点来估计每个栅格单元的地面高度值。然后使用所选点的高度(z 值)通过平方反比距离加权估算地面高度值。在第二步中,然后将值设置为没有值的栅格像元。对于没有值的栅格像元,使用到一侧(行、列)所需的最少步数来获得至少包含一个地面高度值的窗口。如果窗口内有多个具有地面高度值的栅格单元格,则使用反距离加权。对每个栅格像元重复此过程以生成不含缺失值栅格像元的 DEM。在最后一步中,使用活动轮廓表面 [18] 移除了地面以上的值。弹性表面从下方向上推,无法达到与相邻值相比被判断为不切实际的高值。除了最后一步外,该算法还用于早期研究 [11]。
3.10. Circle Fit Within Scan Revolutions (CFSR)
树段内的所有茎段用于估计胸高处的茎直径(DBH,高于地面 1.3 m)。通过估计三次多项式的参数 (p1、p2、p3、p4) 拟合曲线,其中茎段的茎直径 (d) 作为响应变量,与地面的距离 (h) 作为解释变量(方程式(6)).因此,尽管传感器位置存在误差,但可以组合来自各个扫描旋转的圆拟合以形成更可靠的 DBH 估计。这种估计方法也在早期的研究中得到验证 [11]。
3.11. Circle Fit of 3D Point Cloud (CF3D)
茎剖面可用于估计沿树干的茎直径。树干剖面的高度首先通过减去估计树木位置处的地面高程模型的高度来归一化。通过估计三次多项式的参数 (p1、p2、p3、p4) 拟合曲线,其中茎剖面的茎直径 (d) 作为响应变量,与地面的距离 (h) 作为解释变量(方程式(6)).因此,可以组合来自几个高度间隔的 3D 点数据的圆拟合,以形成更可靠的 DBH 估计。

3.12. Validation
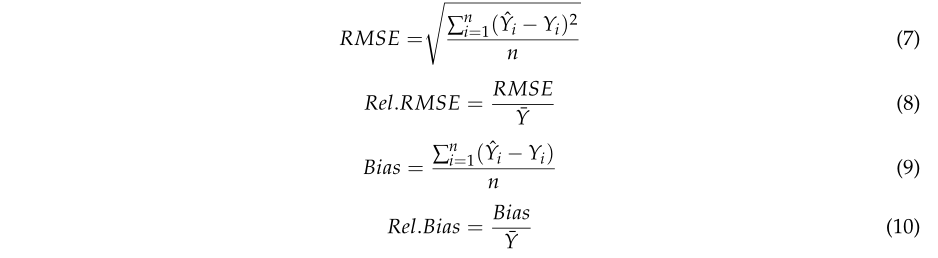
使用较早开发的算法 [13],将 MLS 数据中检测到的树木链接到手动测量的树木。均方根误差 (RMSE) 使用等式 (7) 计算,相对 RMSE (Rel.RMSE) 使用等式 (8) 计算。偏倚用等式(9)计算,相对偏倚(Rel.Bias)用等式(10)计算。变量 ^Y 是激光扫描的测量值,Y 是手动盘点的测量值,¯Y 是手动测量的平均值,n 是观察次数。
5. Discussion
从初始轨迹导出的激光返回的初始 3D 位置的校准,在具有干扰 GNSS 信号的森林中的长时间测量中用中等精度 INS 估计,使得使用的 MLS 系统适用于估计树木位置和茎直径。在具有不同数量的低植被的地块上验证了茎直径的估计值,以了解系统的局限性。林下植被稀疏且靠近地面的树枝很少的两个地块(田间地块 3 和 5)获得了茎直径估计的最高准确度。
如果圆拟合中包含来自分支的激光返回,则可能会高估茎干直径。此外,根据模拟研究,大光束宽度(足迹)可能会导致高估,因为如果光束在树干边缘附近撞击,系统可能会报告返回位置在树干表面前面 [ 19]。在这项研究中,如果获得较差的圆估计并第二次估计圆,则移除靠近茎边缘的激光返回。具有许多圆拟合的树子集的准确性更高可能是因为更多的观察将导致三次多项式函数(等式(6))的更稳定的估计。
本研究验证了两种不同的 DBH 估计方法:CFSR 和 CF3D。结合使用来自单个扫描旋转 (CFSR) 的圆拟合的优点是可以在不受传感器位置误差影响的情况下估算 DBH。在早期的一项研究中,使用来自视觉 SLAM 系统的传感器轨迹,DBH 估计可以使用单独的扫描旋转来改进 [20]。可以从树干中使用多个圆拟合,将它们与特定高度两侧的相似锥度假设相结合或使用锥度函数。这样,定位系统只需要提供足够精确的位置估计,即可将来自各个扫描旋转的激光数据与特定树干相关联。高度间隔内多次扫描旋转的 3D 数据的圆拟合 (CF3D) 的优点是,如果从多个方向观察一棵树,则可以使用树干所有侧面的数据,这应该可以进行高精度的圆半径估计也可能由于分支等引起的噪声。散点图(图 6 和图 7)的比较表明了这种情况。
但是,如果还包括数据点很少的树干,则 CF3D 方法生成的估计精度较低。数据点很少的树干可能仅从一侧观察,因此无法利用多视图的优势。茎点的平滑脊柱校准使得使用 3D 点云的圆拟合成为可能,并获得与基于单个扫描旋转的 DBH 估计相似的 DBH 估计精度。 3D 点云的校准也可用于生成树干的 3D 模型,例如树干轮廓的估计,而不仅仅是 DBH。本研究中验证图上 DBH 估计的准确度与从使用高级定位系统和激光扫描仪的研究中获得的准确度相似。例如,在芬兰的一个边长为 74 m 和 50 m 的矩形地块上,使用配备战术级 IMU 和 FARO Photon 120 地面激光扫描仪的 ROAMER 系统在六轮全地形车上估算 DBH。 DBH 的 RMSE 为 24 毫米 [21]。同样在芬兰,由一名人员携带的 MLS 系统 (AKHKA R2) 以及战术级光纤 IMU 和 FARO Focus 3D 扫描仪被用于边长 40 m 和 50 m 的矩形地块上。使用三个步行路径绘制树木地图,并使用 51 毫米的 RMSE 估计 DBH [2]。在芬兰的另一项研究中,使用 23 个边长为 34 米的正方形地块来验证移动系统。根据场地条件,检测到的树木比例在 60% 到 90% 之间变化。对于简单、中等和困难的地块,DBH 的相对 RMSE 分别为 11%、23% 和 35%。这些类别是根据茎的可见性、空间茎密度和茎直径分布来定义的。每个地块上的轨迹取决于可达性,例如地形的崎岖性、树木密度和低植被 [8]。
挪威也使用了与本研究中使用的相同类型的激光扫描仪。该系统首先包括一个水平安装的 Velodyne VLP-16 激光扫描仪,在扫描仪附近的地面上没有激光返回,这需要一个来自机载激光扫描的外部地面高程模型 [9]。随后对该系统进行了改进,包括两台Velodyne VLP-16 扫描仪、一台水平安装的扫描仪和一台垂直安装的扫描仪,以提高对地面和树干的覆盖范围。对所有检测到的树木的 RMSE 为 2.2 厘米 [10] 的 7 个 500 平方米田间地块使用手动测量验证了茎直径的自动估计。
在这项研究中,只使用了一台 VLP-16 激光扫描仪,但向后倾斜观察,并且在类似的森林条件下获得了类似的茎直径估计结果(例如,每面积单位的茎数)。在本研究中观察到的小树(DBH < 100 mm)检测到的树木比例较低的一个原因可能是使用单独扫描旋转的应用圆拟合结合扫描仪的水平分辨率和距离测量误差。在挪威 [10] 的七个田间地块上也观察到具有小茎直径(DBH < 100 毫米)的树木的高遗漏错误。最小的可检测树干使用圆拟合,至少需要三个点,使用三角函数计算,使用扫描频率、脉冲重复、激光数量和到扫描仪的距离 [9]。有了这些参数,本研究中使用的激光扫描参数应该给出 67 毫米的最小可检测茎直径,与扫描仪的距离为 10 米。在这项研究中,如果未达到剩余目标,则移除靠近树干边缘的激光返回,这也增加了最小可检测树的大小。在距扫描仪 10 米的距离处,圆适合小树(DBH < 100 毫米)的激光返回应该很困难,这是使用传感器轨迹(即半径为 20 米的圆)的地块上到树木的近似最大距离在边缘和中心线上通过)。因此,每秒发射更多脉冲或使用较低扫描频率的激光扫描仪,以及光束发散度较低的激光,可以提高对小树的检测。传感器的发展正朝着每次扫描进行更多测量(即更高分辨率)的方向发展,这使得即使在传感器位置的初始估计不佳的情况下也更容易获得高精度的茎直径估计。
6. Conclusions
开发了一种校准人员携带 MLS 激光返回位置的方法,并将其用于瑞典北部的田间地块,包括低植被森林(例如,叶子茂密的小云杉),以估计树干直径。假设树干截面中心属于同一树干并形成树脊。将校正后的 3D 数据的圆拟合得出的树干直径估计值与结合使用来自各个扫描旋转的圆拟合得到的树干直径估计值进行了比较,在以离地距离作为解释变量的函数中使用。从两种估计方法中获得了类似的估计,这表明用于校准 3D 点云数据的方法是成功的,该方法还使用了由于森林冠层下方全球导航卫星系统的干扰信号而具有高位置误差的传感器轨迹。




![[游戏测试]基于人工智能博弈树,极大极小(Minimax)搜索算法并使用Alpha-Beta剪枝算法优化实现的可人机博弈的AI智能五子棋游戏。](https://img-blog.csdnimg.cn/269b3f4ae07a46df8ea319bc8158f399.gif)