ROS读书记录1:机器人SLAM导航核心技术与实战1
news2026/2/13 7:55:39
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1491041.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章
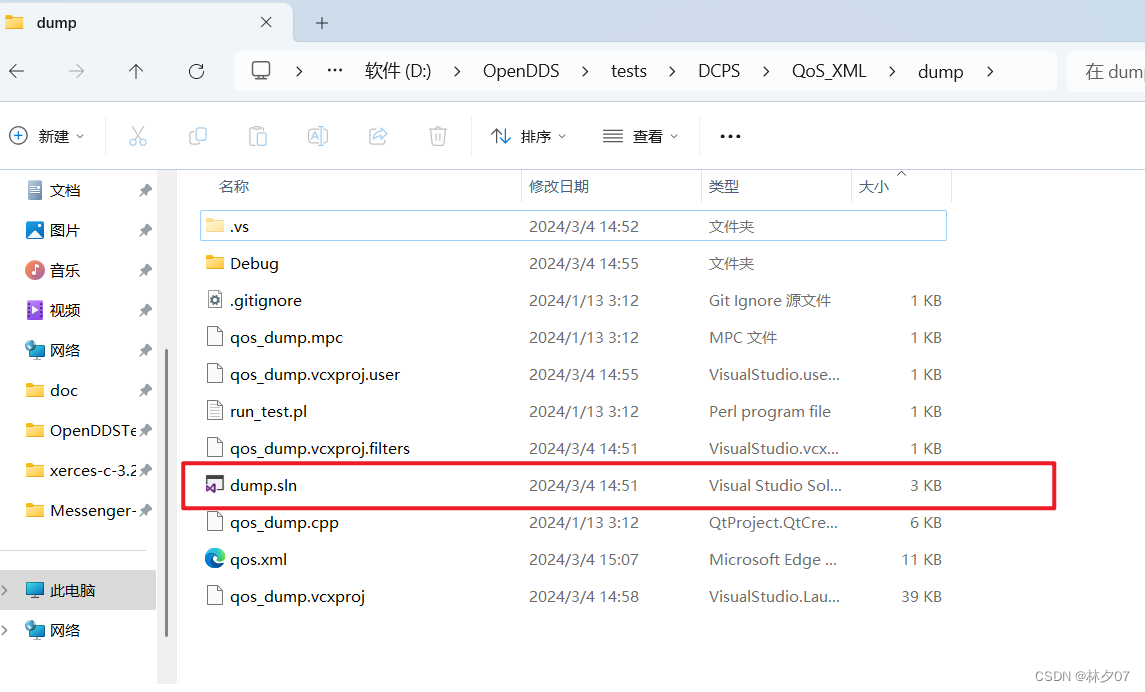
OpenDDS之QosXml库编译(Windows + VS2019)
目录 1、需求背景2、基础环境3、编译xercesc3.1、下载xercesc3.2、编译xercesc 4、编译ACE_XML_Utils4.1、生成XML_Utils解决方案4.2、编译XML_Utils 5、编译QOS_XML_XSC_Handlerd5.1、生成QOS_XML_XSC_Handlerd解决方案5.2、编译QOS_XML_XSC_Handlerd 6、测试例子6.1、生成dum…
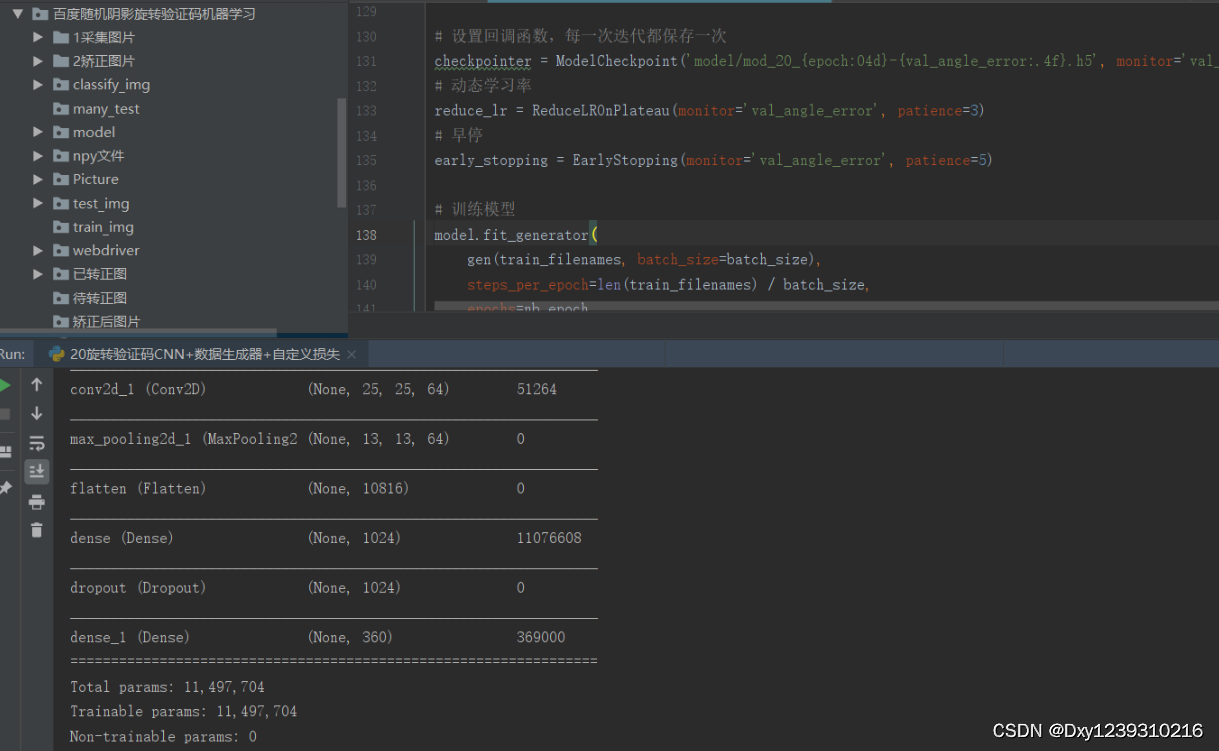
百度文库旋转验证码识别
最近研究了一下图像识别,一直找到很好的应用场景,今天我就发现可以用百度的旋转验证码来做一个实验。没想到效果还挺好,下面就是实际的识别效果。
1、效果演示 2、如何识别
2.1准备数据集
首先需要使用爬虫,对验证码图片进行采…

leetcode最大二叉树
在本题中,我们是要将给定的数组构成一个二叉树,其根节点是数组中最大的元素,左子树都是最大值左边元素组成的,右子树都是最大值右边元素组成的。所以本题的关键在于我们先需要找到最大的元素。 我们构造二叉树,一般是采…
Vue.js 实用技巧:深入理解 Vue.mixin
🤍 前端开发工程师、技术日更博主、已过CET6 🍨 阿珊和她的猫_CSDN博客专家、23年度博客之星前端领域TOP1 🕠 牛客高级专题作者、打造专栏《前端面试必备》 、《2024面试高频手撕题》 🍚 蓝桥云课签约作者、上架课程《Vue.js 和 E…
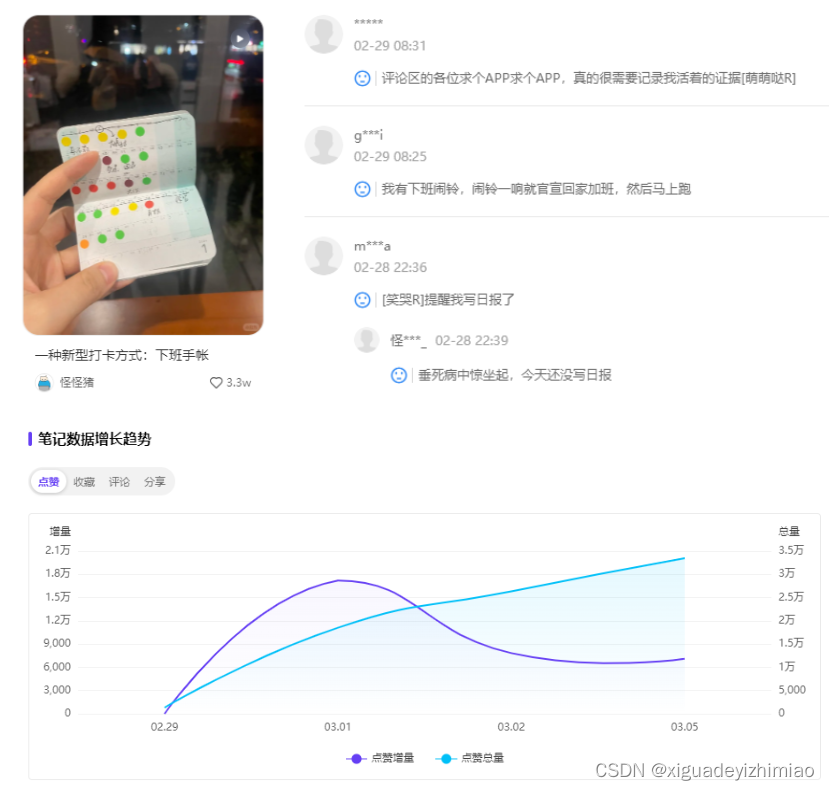
商业数据增长超88%!小红书热门内容解析,用户“打卡”新玩法
长久以来,“打卡”在社交媒体盛行,频频涌现新风潮,几乎覆盖美食、旅游、美妆等众多热门行业,今天吃了什么、玩了什么、做了什么?大众都喜欢通过打卡来分享。特别是小红书平台,打卡内容热度经久不衰…

LeetCode Python - 31.下一个排列
目录 题目答案运行结果 题目
整数数组的一个 排列 就是将其所有成员以序列或线性顺序排列。
例如,arr [1,2,3] ,以下这些都可以视作 arr 的排列:[1,2,3]、[1,3,2]、[3,1,2]、[2,3,1] 。
整数数组的 下一个排列 是指其整数的下一个字典序更…
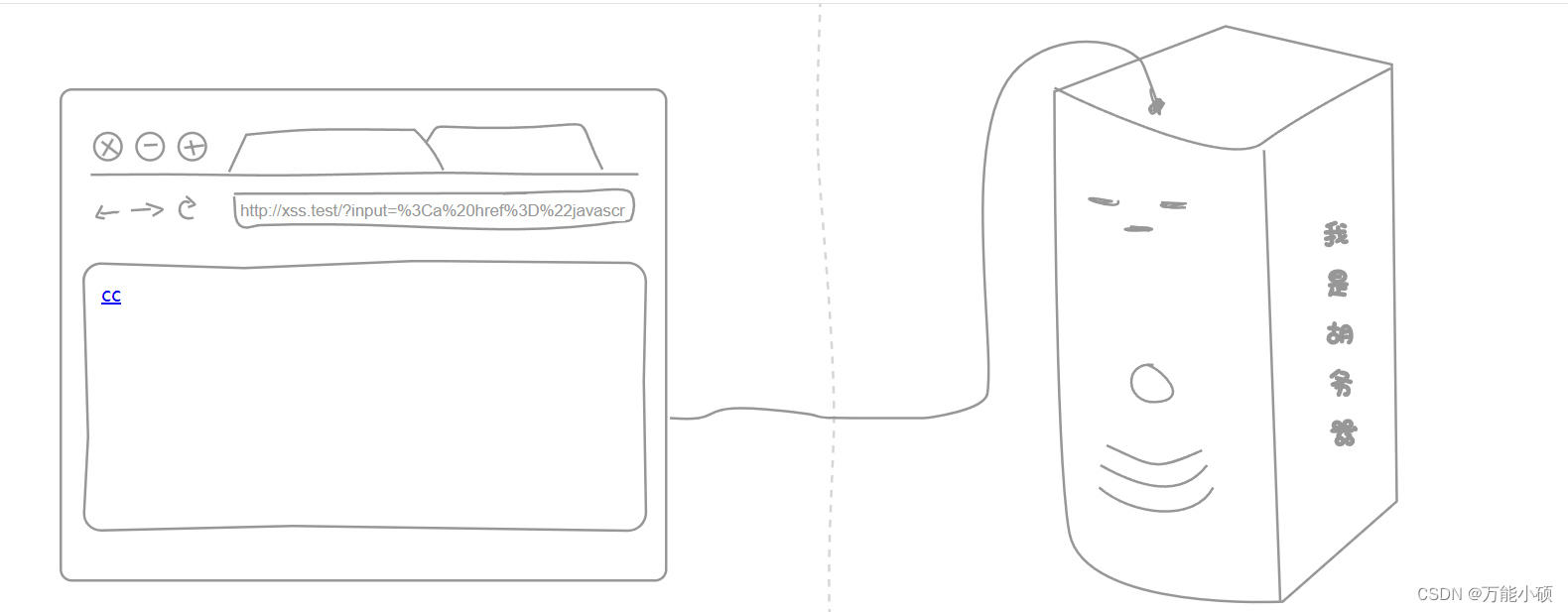
xss.haozi.me:0x03及04
这里有一个正则所以()要用到实体编码 <a href"javascript:alert1">cc</a> 03 04都一样
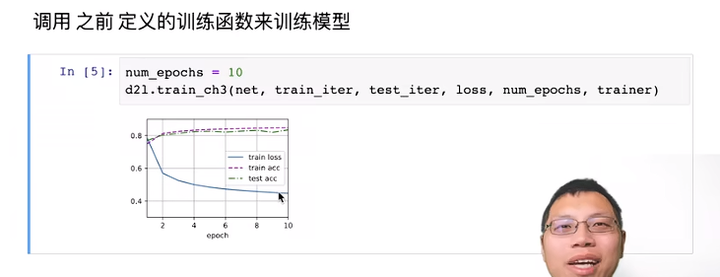
Softmax 回归 + 损失函数 + 图片分类数据集【动手学深度学习v2】李沐动手学深度学习课程笔记
目录 Softmax回归 损失函数 图片分类数据集 Softmax回归从零开始实现 Softmax回归简洁实现 Softmax回归 回归和分类的区别
回归问题举例上节课的预测房价问题,分类问题就是对样本进行分类 回归和分类的具体区别 假设真实的类别为第i个类别(值为1&#x…
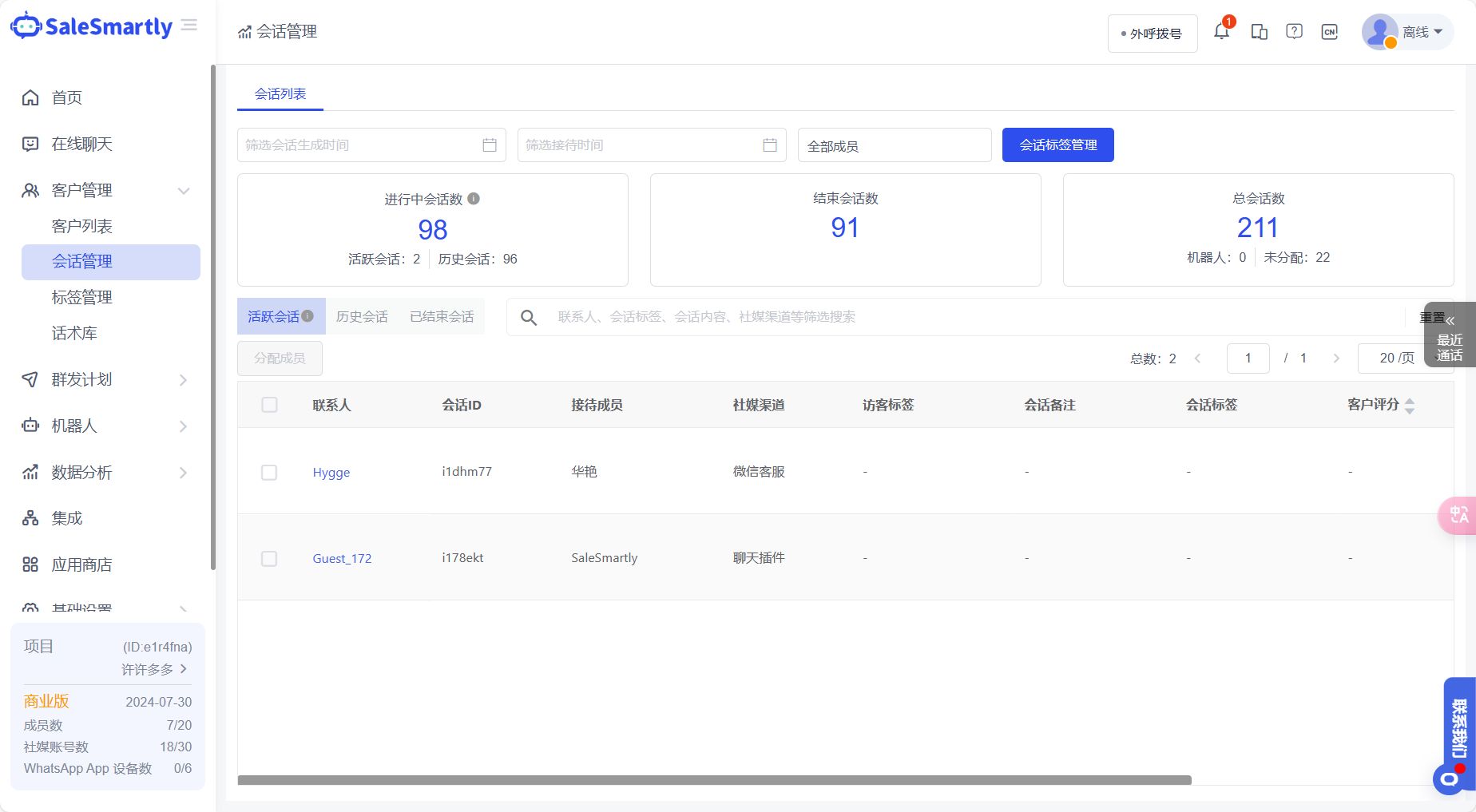
掌握WhatsApp手机号质量评分:增加信息可达性
WhatsApp手机号质量评分是用于衡量用户手机号与平台互动的健康度,确保用户通讯时的合规性和安全性。在实掌握WhatsApp手机号质量评分实际应用中,这个评分会影响用户的消息发送的可达性。高质量的评分意味着用户的账户被视为可信赖的,其发送的…

知识点碎片一,物联网通信协议和技术
loT通信协议
1. 前言
本文属于老吴个人对物联网研发学习的路线整理,属于个人对物流网产品研发的知识碎片的学习,文章没有先后顺序,随笔记录。文章如果有错误,希望各位读者指出问题所在,老吴将不胜感激。
2. 名称概述…

动网格学习:如何系统学习,案例及相关学习内容目录-学习材料
一、学习文章及相关案例 动网格(Moving Mesh)是一种在数值模拟中用于处理流动区域随时间变化的技术。在流体动力学模拟中,当物理模型或某些区域的网格需要随着流动的进行而动态改变时,就会采用动网格技术。例如,在模…

设计师必备!8款在线原型图工具分享
在线原型图的核心功能是可视化需求,因此一个易于使用的在线原型图工具对原型图设计至关重要。使用熟悉的Photoshop 对于Illustrator来说,虽然它们功能强大,但界面太复杂,初学者很难快速上手,面对批量调整的在线原型图还…
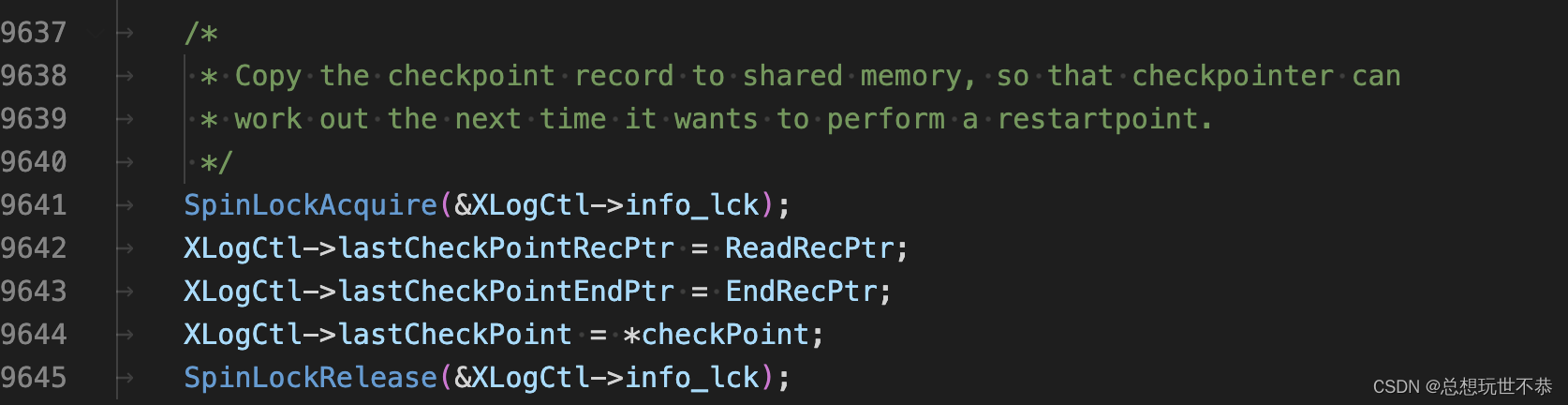
PostgreSQL restartpoint 原理详解
背景
大部分人对 PG 的 checkpoint 机制会熟悉一点,但是对 restartpoint 却不太熟悉,网上介绍这方面的文章也比较少。因此,本文将以 PG 14.7 的社区代码为基础,介绍 PG 中的 restartpoint 机制。
原理介绍
什么是 restartpoint…
VR 全景模式OpenGL原理
VR 全景模式OpenGL原理
VR 全景模式原理
VR 全景模式原理将画面渲染到球面上,相当于从球心去观察内部球面,观察到的画面 360 度无死角,与普通播平面渲染的本质区别在渲染图像部分,画面渲染到一个矩形平面上,而全景需…
稀碎从零算法笔记Day4-LeetCode:交替合并字符串
前言:今天妹有深夜档,因为8点有个飞机
题型:字符串、双指针(笔者没用这个思路)
链接:1768. 交替合并字符串 - 力扣(LeetCode)
来源:LeetCode 著作权归作者所有。商业转…

Linux 文件系列:深入理解文件描述符fd,重定向,自定义shell当中重定向的模拟实现
Linux 文件系列:深入理解文件fd,重定向,自定义shell当中重定向的模拟实现 一.预备知识二.回顾C语言中常见的文件接口跟重定向建立联系1.fopen函数的介绍2.fclose函数的介绍3.代码演示1.以"w"(写)的方式打开2.跟输出重定向的联系3.以 "a"(追加)的方式打开4.…
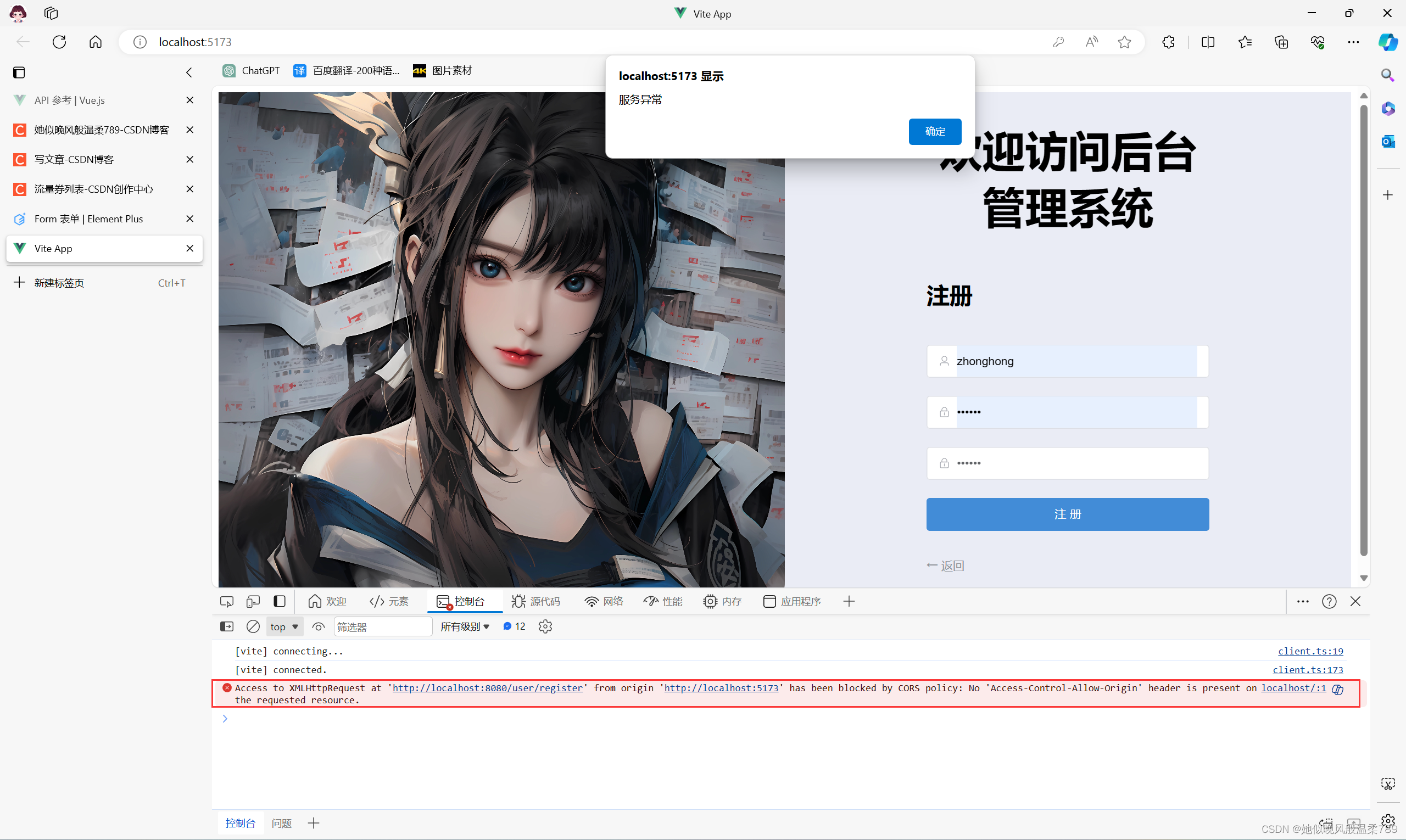
Vue3 配置 vite.config.js 解决跨域问题
Vue3 配置 vite.config.js 解决跨域问题
问题再现 Access to XMLHttpRequest at ‘http://localhost:8080/user/register’ from origin ‘http://localhost:5173’ has been blocked by CORS policy: No ‘Access-Control-Allow-Origin’ header is present on the requested…
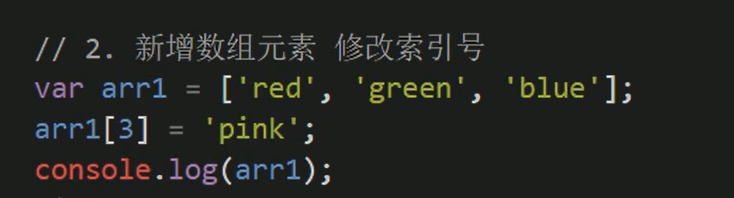
JS数组,if等结构语序
目录 浏览器的断点调试:
流程控制:
顺序流程控制:流程代码会逐行向下进行。
分支流程控制:
IF语句:
Switch语句:
Switch和if的区别:
三元表达式:
循环:
for循环…

麻省理工最新开发AI模型,让机器人实现自主规划路线
文 | BFT机器人 麻省理工学院的研究人员独具匠心地应用了人工智能来解决仓库中的机器人路径规划问题,以此缓解交通拥堵的难题。据该学院介绍,他们的团队开发了一种深度学习模型,其效率比传统的强随机搜索方法高出近四倍,极大地提…

设计模式:策略模式 ⑥
一、策略模式思想
简介 策略模式(Strategy Pattern)属于对象的行为模式。其用意是针对一组算法,将每一个算法封装到具有共同接口的独立的类中,从而使得它们可以相互替换。策略模式使得算法可以在不影响到客户端的情况下发生变化。…