参考:
[1] https://zhuanlan.zhihu.com/p/597490389
[2] https://www.zhangzhenhu.com/aigc/Score-Based_Generative_Models.html
TOC
- 1 基于分数的生成模型
- 1.1 简介和动机
- 1.2 Score Matching及其改进
- 1.2.1 Score Matching
- 1.2.2 Sliced score matching(不是主流,简单介绍)
- 1.2.3 Denoising Score Matching
- 1.3 朗之万动力学采样
- 1.4 问题
- 1.4.1 分数估计不准
- 1.4.2 生成结果偏差大
- 2 NCSN模型
- 2.1 为什么NCSN模型可以
- 2.2 NCSN模型详解
- 2.2.1 噪声设计原则
- 2.2.2 去噪分数匹配
- 2.2.3 退火朗之万动力学采样
- 2.2.4 模型设计
- 2.3 结合代码具体理解:
- 2.3.1 Loss
- 2.3.2 采样生成
- 2.3.3 ConditionalNorm
1 基于分数的生成模型
1.1 简介和动机
所谓的分数就是对数概率密度的梯度,既 s ( x ) = ∂ ( l o g p ( x ) ) ∂ x s(x)=\frac{\partial(logp(x))}{\partial x} s(x)=∂x∂(logp(x))。我们很难估计真实数据分布 p ( x ) p(x) p(x),但如果我们知道分数, 就可以利用分数从 p ( x ) p(x) p(x)做到随机采样,采样方法有很多。
分数就是梯度,既数据分布增大最大的方向和大小(梯度定义),对于数据概率分布来说,概率密度大的地方肯定就是我们想让模型采样数据的区域了(说明训练的图像所在分布都在附近),所以我们每次采样过程都沿着分数(梯度)的方向去走,那么最后就能走到数据分布的高概率区域,生成的数据样本也就符合原始数据分布了。
那么我们的优化目标是什么?以及我们如何采样呢?
1.2 Score Matching及其改进
1.2.1 Score Matching
分数匹配简单来说就是一种概率密度的估计方法。我们的优化目标可表示为下面式子,其中
s
(
x
)
=
∂
(
l
o
g
p
(
x
)
)
∂
x
s(x)=\frac{\partial(logp(x))}{\partial x}
s(x)=∂x∂(logp(x))
1
2
E
p
d
a
t
a
(
x
)
[
∣
∣
s
θ
(
x
)
−
s
d
a
t
a
(
x
)
∣
∣
2
]
\frac{1}{2}E_{p_{data}(x)}[||s_\theta(x)-s_{data}(x)||^2]
21Epdata(x)[∣∣sθ(x)−sdata(x)∣∣2]
但是求真实的分数我们就要知道真实分布的概率密度,所有有一种score matching的方法可以巧妙地避过求真实分布的概率密度,推导如下图:

其中第三项不是关于
θ
\theta
θ的,可以视作常数项。对于第二项,有如下化简:
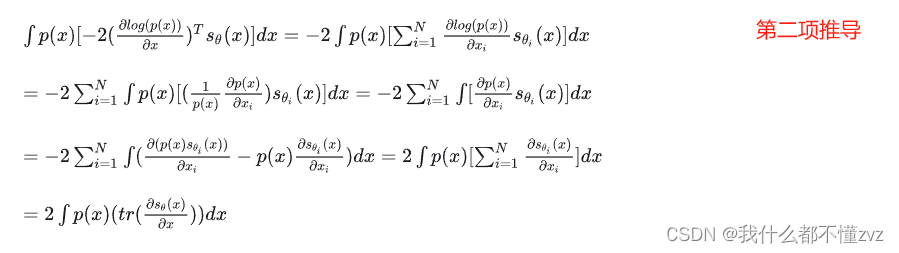
其中第二行、第三行的变换用到了分部积分,第三行直接写为
p
(
x
)
s
θ
i
(
x
)
∣
−
∞
∞
p(x)s_{\theta_i}(x)|_{-\infty}^\infty
p(x)sθi(x)∣−∞∞,积分默认是从负无穷到正无穷,且假设
p
(
∞
)
=
0
p(\infty)=0
p(∞)=0,最后合并,即可得到

我们的优化目标经过score matching之后变为:
E
p
d
a
t
a
(
x
)
[
t
r
(
∂
s
θ
(
x
)
∂
x
)
+
1
2
∣
∣
s
θ
(
x
)
∣
∣
2
]
E_{p_{data}(x)}[tr(\frac{\partial s_\theta(x)}{\partial x})+\frac{1}{2}||s_\theta(x)||^2]
Epdata(x)[tr(∂x∂sθ(x))+21∣∣sθ(x)∣∣2]
其中偏导为
s
θ
(
x
)
s_\theta(x)
sθ(x)的雅可比矩阵,tr为迹,也就是对角线之和。但由于是偏导数,所以需要多次反向传播来分别对每个分量进行计算。
1.2.2 Sliced score matching(不是主流,简单介绍)
我们使用一个对迹的估计方法( Hutchinson trace estimator)对其进行估计,并且使用自动微分对最终形式进行计算:

虽然更好计算了,但是计算量反增不减
1.2.3 Denoising Score Matching
之前说
p
d
a
t
a
(
x
)
p_{data} (x)
pdata(x)不知道,我们可以自定义数据分布,使之是被知道的。具体做法是:
对原始数据加上噪声,使之满足预定好的分布,然后就知道概率密度了,就可以使用最原始的方法去计算优化目标了。
假设预定好的分布(加噪过程)为
q
σ
(
x
~
∣
x
)
=
N
(
x
~
;
x
,
σ
2
I
)
q_\sigma(\tilde x|x)=N(\tilde x; x, \sigma^2 I)
qσ(x~∣x)=N(x~;x,σ2I),其中
σ
\sigma
σ是与定义好的。加噪的数据变为:
q
σ
(
x
~
)
=
∫
q
σ
(
x
~
∣
x
)
p
d
a
t
a
(
x
)
d
x
q_\sigma(\tilde x)=\int q_\sigma(\tilde x|x)p_{data}(x)dx
qσ(x~)=∫qσ(x~∣x)pdata(x)dx,且在忽略与模型参数不相关的常数项后,我们可以得到:

其中左边为显示分数匹配(EMS),右边为去噪分数匹配(DMS)。注意:此时我们传入到模型的是加噪后的数据
x
~
\tilde x
x~,加载过程就是从
N
(
0
,
I
)
N(0,I)
N(0,I)随机采样噪声,乘上预定义的方差,再加到样本中,既
x
~
=
x
+
σ
ϵ
\tilde x=x+\sigma \epsilon
x~=x+σϵ。这样加载后的数据会满足预定义好的
q
σ
(
x
~
∣
x
)
q_\sigma(\tilde x|x)
qσ(x~∣x)。我们网络估计出来的分数是对应噪声数据分布
q
σ
(
x
~
)
q_\sigma(\tilde x)
qσ(x~)的,而非
p
d
a
t
a
(
x
)
p_{data}(x)
pdata(x)的,所以就要求
σ
\sigma
σ很小,避免过大扰动。
所以经过denoising score matching可得优化目标:
1
2
E
q
σ
(
x
~
∣
x
)
q
d
a
t
a
(
x
)
[
∣
∣
s
θ
(
x
~
)
+
∇
x
~
l
o
g
(
q
θ
(
x
~
∣
x
)
∣
∣
2
]
\frac{1}{2}E_{q_\sigma(\tilde x|x)q_{data}(x)}[||s_\theta(\tilde x)+\nabla_{\tilde x}log(q_\theta(\tilde x|x)||^2]
21Eqσ(x~∣x)qdata(x)[∣∣sθ(x~)+∇x~log(qθ(x~∣x)∣∣2]
1.3 朗之万动力学采样
采样过程如下:
x
~
t
=
x
~
t
−
1
+
ϵ
2
∇
x
~
t
−
1
l
o
g
p
(
x
~
t
−
1
)
+
ϵ
z
t
\tilde x_t = \tilde x_{t-1} +\frac{\epsilon}{2} \nabla_{\tilde x_{t-1}}logp(\tilde x_{t-1}) +\sqrt\epsilon z_t
x~t=x~t−1+2ϵ∇x~t−1logp(x~t−1)+ϵzt
其中
z
t
z_t
zt为从N(0,1)采样的随机项,
ϵ
\epsilon
ϵ为预定好的的步长
1.4 问题
1.4.1 分数估计不准
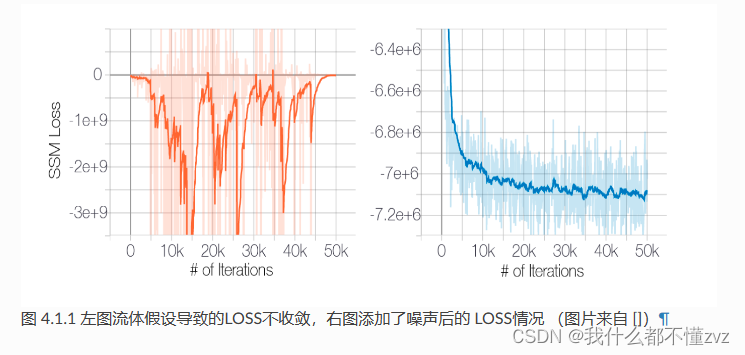
流形学习角度
分数的估计
s
(
x
)
=
∂
l
o
g
(
p
d
a
t
a
(
x
)
∂
x
s(x)=\frac{\partial log(p_{data}(x)}{\partial x}
s(x)=∂x∂log(pdata(x)是针对整个编码空间定义的,根据mainfold hypotheis,高维空间中的真实数据大部分倾向于分布在低维空间,也就是说,在某些空间计算梯度是没有意义的,也就导致了loss震荡不收敛的情况。
低密度概率区域角度
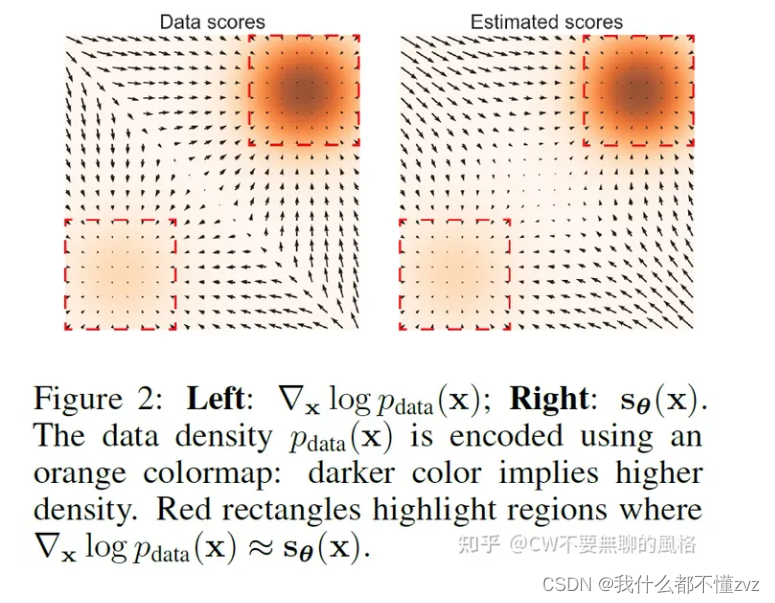
说白了就是模型训练不充分,属于低概率密度区域的数据没有足够的样本让模型去训练,所以导致这部分的分数估计不准。由上图右图可以知道,在中间低概率密度区域,梯度大小和左图真实分数不一样,对于右图而言,如果在中间的地概率密度区域采样,那么可能就陷入在这了(梯度大小太小,不更新)
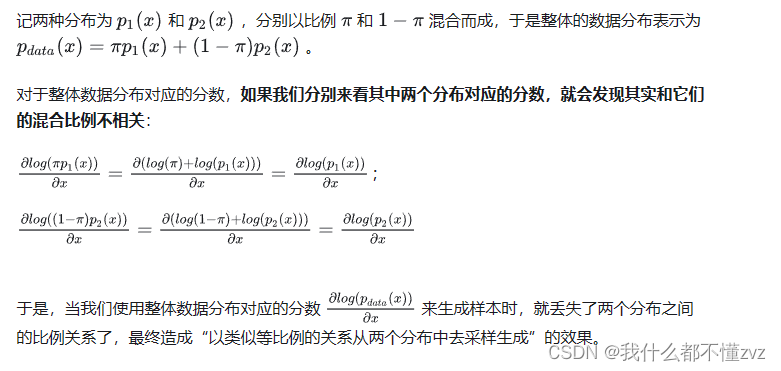
1.4.2 生成结果偏差大
我们采用的郎之万动力学采样有一个缺陷,当低密度区与把概率空间分成几块的时候,郎之万动力学采样不能很好地表示其比例关系(如下不严谨推导)
理论上当步长很小,步数很大的时候可以得到与原分布相似的结果,但通常不这么做,太费劲。
2 NCSN模型
2.1 为什么NCSN模型可以
之前提到了两个困难:1) 高维空间的有效性,既真实数据往往只集中在少数低维空间;2)低密度区域往往因为训练样本不足导致分数匹配估计不准确;
通过添加高斯噪声可以解决以上困难:
1) 增加高斯噪声后,相当于改变了原数据分布。首先会破坏
x
x
x各个维度的相关性,使之的相关性逐渐减少,相当于
x
x
x变成了满秩。也就解决了上面说的流形学习的问题。
2) 各个分量之间添加的噪声是同等权重的,所以低密度区域的密度会变大,整个密度空间也就变得均匀。且低密度区域不仅会被填满,高密度区域所占的比例在填满后会变得更高,所以扰动后的分数更多地由比例更高的分布的分数演变而来,所以分数的方向自然就指向比例更高的分布。我的理解是以下
p
1
(
x
)
p_1(x)
p1(x)的值更大了,而
p
2
(
x
)
p_2(x)
p2(x)的值还很小。

2.2 NCSN模型详解
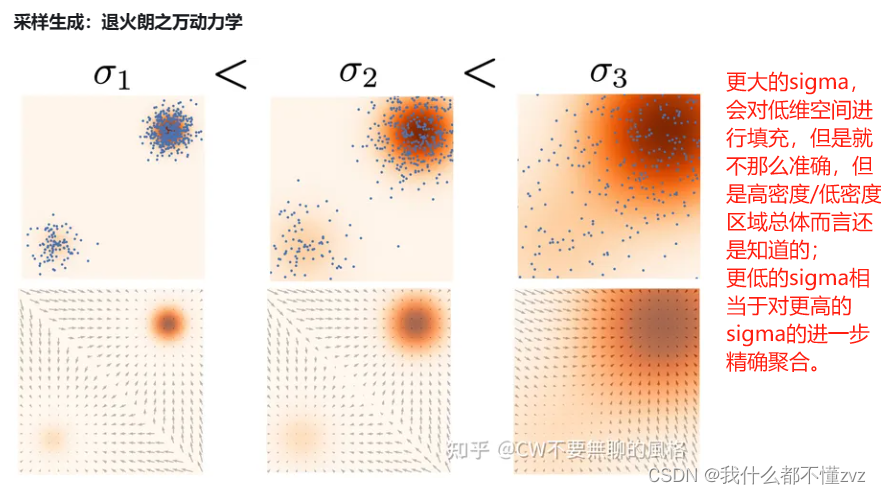
2.2.1 噪声设计原则
上面说到,添加高斯噪声可以解决提到的两个困难,并且噪声强度越大,解决的效果越明显。但我们也知道,去噪分数匹配的前提就是 q σ ( x ~ ) q_\sigma(\tilde x) qσ(x~)不能离 p d a t a ( x ) p_{data}(x) pdata(x)太远,所以添加的噪声强度不能太大。所以作者设计了各种强度的噪声, { σ i } i = 1 L \{\sigma_i\}_{i=1}^L {σi}i=1L满足 σ 1 σ 2 = . . . = σ L − 1 σ L > 1 \frac{\sigma_1}{\sigma_2}=...=\frac{\sigma_{L-1}}{\sigma_L}>1 σ2σ1=...=σLσL−1>1,且 σ 1 \sigma_1 σ1足够大,使得能够填充低密度区与, σ L \sigma_L σL足够小,使得对原数据分布良好近似
2.2.2 去噪分数匹配
我们已知
q
σ
(
x
~
)
q_\sigma(\tilde x)
qσ(x~)满足高斯分布
N
(
x
,
σ
2
I
)
N(x,\sigma^2I)
N(x,σ2I),所以其分数
∇
l
o
g
(
q
σ
(
x
~
∣
x
)
)
=
−
(
x
~
−
x
σ
2
)
\nabla log(q_\sigma(\tilde x|x))=-(\frac{\tilde x-x}{\sigma^2})
∇log(qσ(x~∣x))=−(σ2x~−x),所以某个噪声级别的优化目标可以变为:
l
(
θ
;
σ
)
=
1
2
E
p
d
a
t
a
E
x
~
∼
N
(
x
,
σ
2
I
)
[
∣
∣
s
θ
(
x
~
,
σ
)
+
x
~
−
x
σ
2
∣
∣
2
]
l(\theta;\sigma)=\frac{1}{2}E_{p_{data}}E_{\tilde x\sim N(x,\sigma^2I)}[||s_\theta(\tilde x,\sigma)+\frac{\tilde x-x}{\sigma^2}||^2]
l(θ;σ)=21EpdataEx~∼N(x,σ2I)[∣∣sθ(x~,σ)+σ2x~−x∣∣2]
又NCSN使用了多个噪声级别,应该对齐损失加权后在求平均,所以
L
=
1
L
∑
λ
(
σ
i
)
l
(
θ
;
σ
)
L = \frac{1}{L}\sum\lambda(\sigma_i)l(\theta;\sigma)
L=L1∑λ(σi)l(θ;σ)
λ
\lambda
λ该如何设计呢,有以下出发点:
1) 所有加权后的噪声都应该在同一个数量级,既不受
σ
\sigma
σ影响,这样就不会因为加权后哪个噪声级别大或小,就重视或忽略其他级别噪声。
作者发现
s
θ
(
x
~
,
σ
)
s_\theta(\tilde x,\sigma)
sθ(x~,σ)的L2范数在
1
σ
\frac{1}{\sigma}
σ1的水平,所以作者将
λ
(
σ
)
\lambda(\sigma)
λ(σ)设为
σ
i
2
\sigma_i^2
σi2,代入后得

所以term 1的量级会变为1, term 2采样自
N
(
0
,
I
)
N(0,I)
N(0,I),所以所有噪声级别的损失都会在同一量级。
2.2.3 退火朗之万动力学采样
前文我们讨论过,郎之万动力采样法存在着不足,对于那些存在低密度区域分割成多个高密度区域的复杂分布,需要较多的采样步骤才能得到相对可靠的采样结果, 无法在一个可接受的步骤内得到较好的采样结果,针对这个问题,作者提出了一个改进的郎之万动力采样法,称为退火朗之万动力采样法 (annealed Langevin dynamics)。之所以叫退火朗之万动力采样法,是因为每次的噪音级别都在减小,所以annealed。
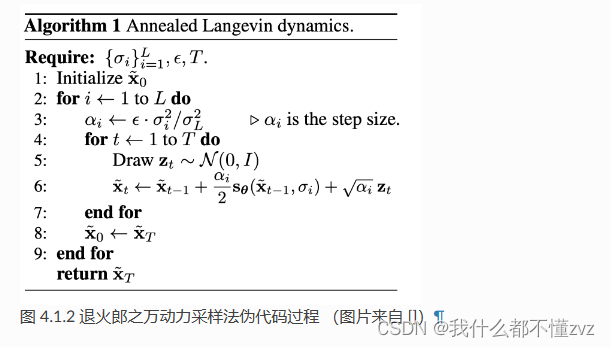
首先初始化超参
{
σ
i
}
\{\sigma_i\}
{σi},然后从均匀分布或高斯分布中随机采样初始化
x
~
0
\tilde x_0
x~0。第一层循环是噪声等级循环,由
σ
1
\sigma_1
σ1到
σ
L
\sigma_L
σL,由大到小。内部循环是一个朗之万动力学采样过程,既步数由1到T,传入
x
~
t
−
1
、
σ
i
\tilde x_{t-1}、\sigma_i
x~t−1、σi到模型中,预测出分数,然后代入式子进行采样。并且每次内部循环以后,下一个级别的噪声会用上一个级别噪声计算出来的
x
~
0
\tilde x_0
x~0来当作初始化噪声,理由在下面会解释。当
i
=
L
i=L
i=L时,
σ
L
\sigma_L
σL很小,所以最终得到的分布就近似于真实数据分布
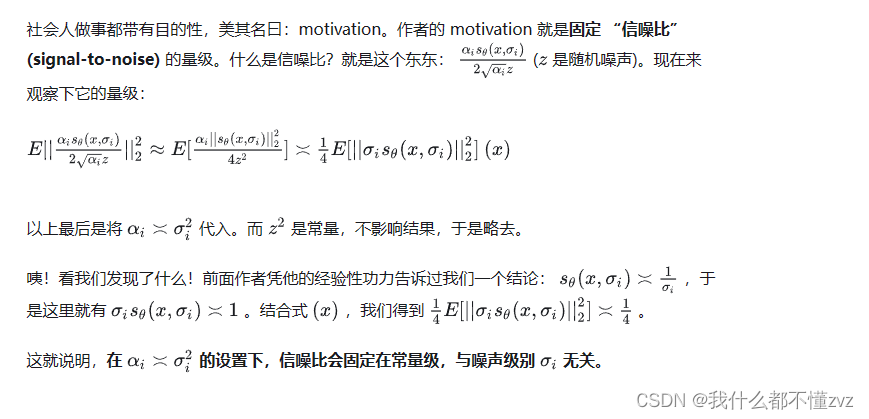
为什么要用上一个级别的噪声来计算呢?
这里
α
=
ϵ
σ
i
2
σ
L
2
\alpha=\epsilon\frac{\sigma_i^2}{\sigma_L^2}
α=ϵσL2σi2的设计是因为:
2.2.4 模型设计
模型的输出(分数)要和模型的输入图像的shape保持一致,很自然就想到用UNet模型。作者还在其中加入了空洞卷积和以噪声为条件的实例归一化(conditional instance normalization ++ ),并且对于同一个像素点,不同强度下的噪声强度也要对应估计出不同的分数,所以模型还要以噪声强度 σ i \sigma_i σi作为输入。
2.3 结合代码具体理解:
2.3.1 Loss
NCSN的损失函数可以表示为:
l
(
θ
;
σ
)
=
1
2
E
p
d
a
t
a
E
x
~
∼
N
(
x
,
σ
2
I
)
[
∣
∣
s
θ
(
x
~
,
σ
)
+
x
~
−
x
σ
2
∣
∣
2
]
l(\theta;\sigma)=\frac{1}{2}E_{p_{data}}E_{\tilde x\sim N(x,\sigma^2I)}[||s_\theta(\tilde x,\sigma)+\frac{\tilde x-x}{\sigma^2}||^2]
l(θ;σ)=21EpdataEx~∼N(x,σ2I)[∣∣sθ(x~,σ)+σ2x~−x∣∣2]
又
L
=
1
L
∑
λ
(
σ
i
)
l
(
θ
;
σ
)
λ
(
σ
)
=
σ
2
L = \frac{1}{L}\sum\lambda(\sigma_i)l(\theta;\sigma)\\ \lambda(\sigma)=\sigma^2
L=L1∑λ(σi)l(θ;σ)λ(σ)=σ2
代码及其解析:
def anneal_dsm_score_estimation(scorenet, samples, labels, sigmas, anneal_power=2.):
used_sigmas = sigmas[labels].view(samples.shape[0], *([1] * len(samples.shape[1:])))
perturbed_samples = samples + torch.randn_like(samples) * used_sigmas
target = - 1 / (used_sigmas ** 2) * (perturbed_samples - samples)
scores = scorenet(perturbed_samples, labels)
target = target.view(target.shape[0], -1)
scores = scores.view(scores.shape[0], -1)
loss = 1 / 2. * ((scores - target) ** 2).sum(dim=-1) * used_sigmas.squeeze() ** anneal_power
return loss.mean(dim=0)
-
传入的参数分别表示:
1)scorenet: 预测分数的网络
2)samples: 采样的样本,加噪前的样本,既 x t − 1 x_{t-1} xt−1
3)labels: 噪声的级别,可以理解为 i i i,相当于索引,就是能够区分不同的噪声即可
4)sigmas:预定义的方差
5)annel_power:就是 λ = σ 2 \lambda=\sigma^2 λ=σ2中的平方项 -
第一行代码将尺寸由(bs,)变为(bs,1,1,1)
-
第二行代码计算 x ~ = x + σ ϵ \tilde x= x+\sigma\epsilon x~=x+σϵ
-
第三行代码计算 x ~ − x σ 2 \frac{\tilde x-x}{\sigma^2} σ2x~−x
-
第四行代码计算模型预测的分数
-
第五行、第六行代码将尺度变换以下方便计算loss
-
第七行计算loss,首先计算所有维度下的分数估计的误差总和,然后再求平均
2.3.2 采样生成
伪代码如下:
python代码如下:
def anneal_Langevin_dynamics(self, x_mod, scorenet, sigmas, n_steps_each=100, step_lr=0.00002):
images = []
with torch.no_grad():
# 依次在每个噪声级别下进行朗之万动力学采样生成,噪声强度递减
for c, sigma in tqdm.tqdm(enumerate(sigmas), total=len(sigmas), desc='annealed Langevin dynamics sampling'):
# 噪声级别
labels = torch.ones(x_mod.shape[0], device=x_mod.device) * c #
labels = labels.long()
# 这个步长并非 Algorithm 1 中的 alpha,而是其中第6步的 alpha/2
step_size = step_lr * (sigma / sigmas[-1]) ** 2
# 每个噪声级别下进行一定步数的朗之万动力学采样生成
for s in range(n_steps_each):
images.append(torch.clamp(x_mod, 0.0, 1.0).to('cpu'))
# 对应公式(vi)最后一项
noise = torch.randn_like(x_mod) * np.sqrt(step_size * 2)
# 网络估计的分数
grad = scorenet(x_mod, labels)
# 朗之万动力方程
x_mod = x_mod + step_size * grad + noise
return images
x_mod: x ~ 0 \tilde x_0 x~0- 外部for循环中的c表示索引,而labels就是索引值
step_size表示 α i / 2 \alpha_i/2 αi/2,而 α i = ϵ ∗ σ i / σ L \alpha_i = \epsilon* \sigma_i/\sigma_L αi=ϵ∗σi/σL,其中 ϵ = 0.00002 \epsilon=0.00002 ϵ=0.00002- 内部循环中,要将images先裁剪到0~1,是因为:
1)方便后期变换为0-255
2)模型兼容性:归一化到0-1,后期采样时对模型归一化就具有意义。
3)可视化和存储:将图像数据裁剪到0到1的范围内可以直接用于可视化或存储为标准格式的图像文件(如JPEG或PNG),这些格式期望输入数据在这个范围内。