目录
前言
1. 3GPP规划下的5G技术演进
2. 5G NR定位技术的发展
2.1 Rel-16首次对基于5G的定位技术进行标准化
2.2 Rel-17进一步提升5G定位技术的性能
3. Rel-18 关于5G定位技术的新方向、新进展
3.1 Sidelink高精度定位功能
3.2 针对上述不同用例,3GPP考虑按照下表中的精度要求为目标,开展标准化工作:
3.3 对高精度定位完整性和低功耗的增强
4. 基于RedCap 的UE定位
前言
3GPP NR Positioning 5G定位标准:3GPP TS 38.305 V18
3GPP 标准网址:Directory Listing /ftp/
【NR 定位】3GPP NR Positioning 5G定位标准解读(一)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(二)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(三)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(四)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(五)-CSDN博客
【NR 定位】3GPP NR Positioning 5G定位标准解读(六)-CSDN博客
1. 3GPP规划下的5G技术演进
根据3GPP的规划,5G技术演进被分为两个阶段,Rel-15/16/17这三个版本称为5G演进的第一阶段,之后的Rel-18/19/20这三个版本称为5G演进的第二轮创新,也就是5G Advanced。
在5G演进的第一阶段中,Rel-15是5G的基础标准,于2018年(NSA)和2019年(SA)分别冻结,重点满足增强移动宽带(eMBB)和基础的低时延高可靠(URLLC)应用需求。
Rel-16于2020年冻结,主要聚焦于eMBB的增强,低时延高可靠能力的完善,关注垂直行业应用及整体系统的提升,如面向智能汽车交通领域的5G V2X、面向IIoT领域的时间敏感联网等5G NR能力,以及定位、MIMO增强、功耗改进等系统性的提升与增强。
Rel-17在Rel-16的框架下对5G标准进行了进一步的增强,于2022年冻结,其面向5G XR、新型物联网等新业务需求,重点引入了许多全新的特性和技术,比如Redcap终端、上行覆盖增强、动态频谱共享、多播广播业务、多卡技术、卫星5G网络、卫星 NB-IoT物联网、下行1024QAM、定位增强、MIMO技术进一步增强(FeMIMO)、节能增强、URLLC增强、CA/DC增强、辅链路通信增强、无线切片增强等。

2. 5G NR定位技术的发展
5G 应用分为三大类场景:增强移动宽带(eMBB)、海量机器类通信(mMTC)和超可 靠低时延通信(URLLC)。eMBB 场景是指在现有移动宽带业务场景的基础上,对于用 户体验等性能的进一步提升,主要还是追求人与人之间极致的通信体验。mMTC 和 uRLLC 都是物联网的应用场景,但各自侧重点不同。mMTC 主要用于低速时延不敏感的海量物与物的连接。而 URLLC则强调在工业及控制场景对高可靠性和低时延有需求的连接 定位应用在 5G 三大场景中都扮演重要的角色,定位能力更是是 5G 核心能力之一。
2.1 Rel-16首次对基于5G的定位技术进行标准化
R16版本中增加了5G定位功能,其利用MIMO多波束特性,定义了基于蜂窝小区的多站信号往返时间(Multi-RTT)、信号到达时间差(TDOA)、到达角测量法(AoA)、离开角测量法(AoD)等定位技术。R16标准中,室内和室外定位的精度要求如下:
- 对于80%的UE,水平定位精度优于3米(室内)和10米(室外)。
- 对于80%的UE,垂直定位精度优于3米(室内和室外)。
2.2 Rel-17进一步提升5G定位技术的性能
随着5G NR通信系统大规模部署,垂直行业场景对定位服务提出了越来越迫切的需求。对运营商而言,也对未来位置服务的广阔市场充满期待,迫切需要拓展基于5G NR的位置增值服务,为普通用户和垂直行业(ToB)提供更高精度的定位服务(20cm)。
因此3GPP确定Rel-17在以下方面进行增强 [摘自3GPP TR 38.857]
- 更高的精度(水平/垂直)
- 低时延(物理层和高层端到端定位时延)
- 网络和/或设备效率
- 高完整性和可靠性(用于GNSS)
商业场景及IIOT场景下性能指标的要求分别为:
商业用例的目标定位需求定义如下:
- 90%的ue水平定位精度(< 1米)
- 90% ue的垂直定位精度(< 3米)
-终端位置估计的端到端延迟(< 100 ms)
- UE位置估计的物理层延迟(< 10 ms)
IIoT用例的目标定位要求定义如下:
- 90%的ue水平定位精度(< 0.2 m)
- 90%的ue的垂直位置精度(< 1米)
- UE位置估计的端到端延迟(< 100ms,期望为10ms)
- UE位置估计的物理层延迟(<10ms)
注1:并非所有方案和部署都能达到目标定位要求
注2:对于某些场景,在工业物联网用例中,对水平位置精度的要求可以放宽到< 0.5 m。
注3:并非所有定位技术都能在所有场景下达到目标定位要求
3. Rel-18 关于5G定位技术的新方向、新进展
Rel-18中关于5G定位技术的讨论主要包括三个方向:Sidelink高精度定位功能,对高精度定位完整性和低功耗的增强,基于RedCap 的UE定位;下文将详细介绍这三个方向的研究和讨论内容。为减少分歧,部分专业词汇及内容将直接引用3GPP相关文档原文。
3.1 Sidelink高精度定位功能
Sidelink定位是Rel-18新引入的特性,与之前版本的NR RAT定位相对独立,旨在研究通过PC5接口实现Sidelink高精度定位功能,这也称之为standalone模式;除此之外,也支持与现有NR RAT技术联合,通过基站辅助(需在覆盖、半覆盖场景下)实现协同定位,即non-standalone模式。Sidelink定位的基础属性如下:
- 覆盖:覆盖内、部分覆盖和覆盖外
- 要求:基于TR38.845和TS22.261和TS22.104中确定的要求
- 用例:V2X (TR38.845)、公共安全(TR38.845)、商业(TS22.261)、工业物联网(TS22.104)
- 频谱:ITS band和授权频谱
具体地,由于Sidelink是一套比较独立的系统,具备两种工作模式(mode1和mode2),且可能在没有网络覆盖的场景工作,因此需要从头到尾重新设计Sidelink定位方案。不过,在一些技术上还是参考了NR定位设计,例如参考信号,定位测量等方面。
在Rel-18中,定义了三种Sidelink定位方式,分别是Absolute positioning、Relative positioning和Ranging,三种方式对应的描述如下:
- Ranging accuracy, expressed as the difference (error) between the calculated distance/direction and the actual distance/direction in relation to another node
- Relative positioning accuracy, expressed as the difference (error) between the calculated horizontal/vertical position and the actual horizontal/vertical position relative to another node
- Absolute positioning accuracy, expressed as the difference (error) between the calculated horizontal/vertical position and the actual horizontal/vertical position.
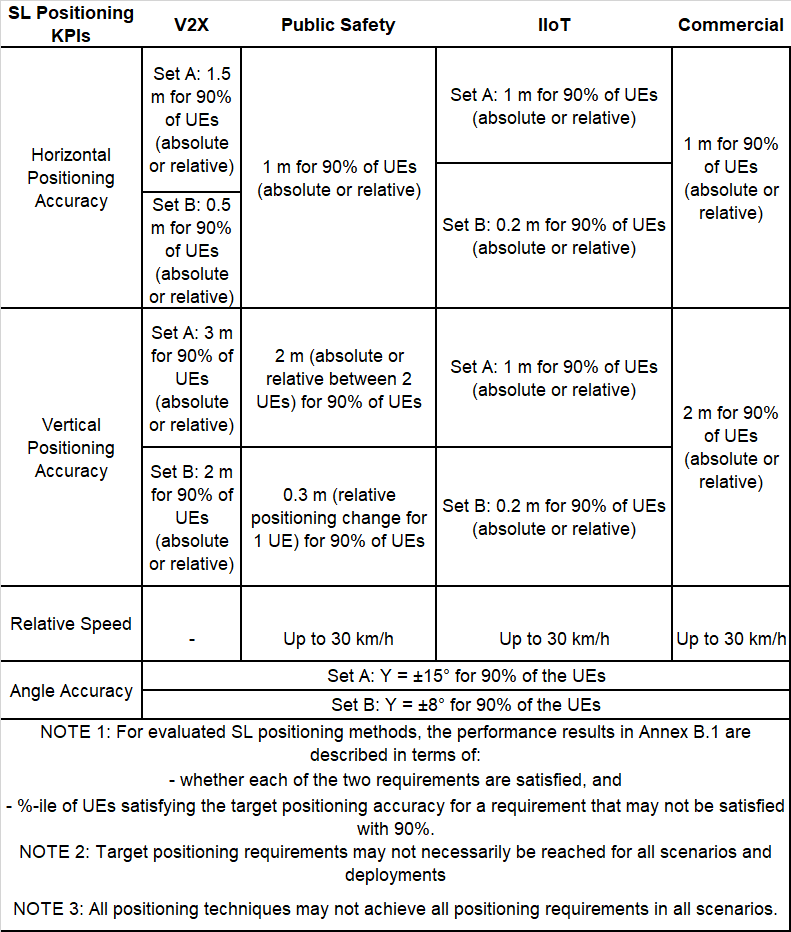
3.2 针对上述不同用例,3GPP考虑按照下表中的精度要求为目标,开展标准化工作:
Table: Target accuracy requirements for SL positioning
3.3 对高精度定位完整性和低功耗的增强
为了进一步提高精度,Rel- 18考虑在NR RAT定位引入两种较有前景的技术:一种是利用5G丰富的频谱,基于PRS/SRS带宽聚合来增加定位参考信号的收发带宽,另一种是使用NR载波相位测量。与现有的NR定位方法相比,NR载波相位定位在室内和室外部署中具有显著的性能改进潜力,并且与室外RTK-GNSS相比,具有更短的延迟和更低的终端功耗。此外,还将研究基于NR RAT的定位完整性和低功耗高精度定位技术。具体地,可以分为以下四个部分:
1. Improved accuracy based on NR carrier phase measurement
在Rel-18中,由于极其优异的定位性能(经过仿真模拟,能够实现厘米级定位精度,可参考TR 38.859),基于载波相位测量的定位方式被引入,各家公司在该议题下进行了大量讨论,包括如何进行相位测量、定位计算及上报等问题。其中,如何确定整数模糊度(请见下文原理说明),是目前讨论最多的问题。
在载波相位定位的标准化工作中,一个主要导向是尽量避免给现有协议带来额外影响,因此载波相位定位的很多机制都重用了现有NR定位内容。简而言之,载波相位定位只是在具体的定位算法上和现有技术有区别,而定位触发、测量和上报等环节和现有方式原理是类似的(至少从物理层流程的角度看,但也有一些差异内容),可以理解为是将载波相位定位方式纳入现有定位体系。
2. Bandwidth aggregation for positioning measurements
RAN 1从112次会议开始讨论基于带宽聚合的定位,这和载波聚合通信是不同的概念,但其中有一些交叉的部分。无论是上行SRS还是下行PRS,在Rel-18中均支持带宽聚合定位,但定位的带宽聚合实现更为复杂,因为涉及到关联TRP和定位频率层等概念,聚合的资源在频域上不一定是连续的。从物理层的角度,UE在Connected态、inactive态和idle态下均可进行PRS带宽聚合测量,在Connected态和inactive态可以进行定位SRS带宽聚合。
3. Solutions for integrity of RAT dependent positioning techniques
在之前的版本中,3GPP完成了基于GNSS定位的完整性设计,在Rel-18中,3GPP决定处理基于NR RAT定位方式的定位完整性。其中,定位完整性可以理解为对定位相关数据的精确性以及提供相关警报的能力的信任度量,其定义如下:
Positioning integrity: A measure of the trust in the accuracy of the position-related data and the ability to provide associated alerts.
4. LPHAP (Low Power High Accuracy Positioning).
Rel-18 LPHAP目前的研究侧重于评估RRC_INACTIVE态下,基于现有Rel-17定位技术,终端是否能够满足电池时间需求(电池时间评估方式已达成一致意见,请参考会议结论)以及定位要求。并且,为了能够处理RRC_INACTIVE状态和/或RRC_IDLE状态下UE面临的任何限制,3GPP正研究对应的增强方案。
具体地,3GPP确定TS 22.104中的用例6(如下表所示),对应的电池时间需求为6-12个月,作为LPHAP研究的代表用例。在物理层,功率消耗是LPHAP仿真评估的主要角度。
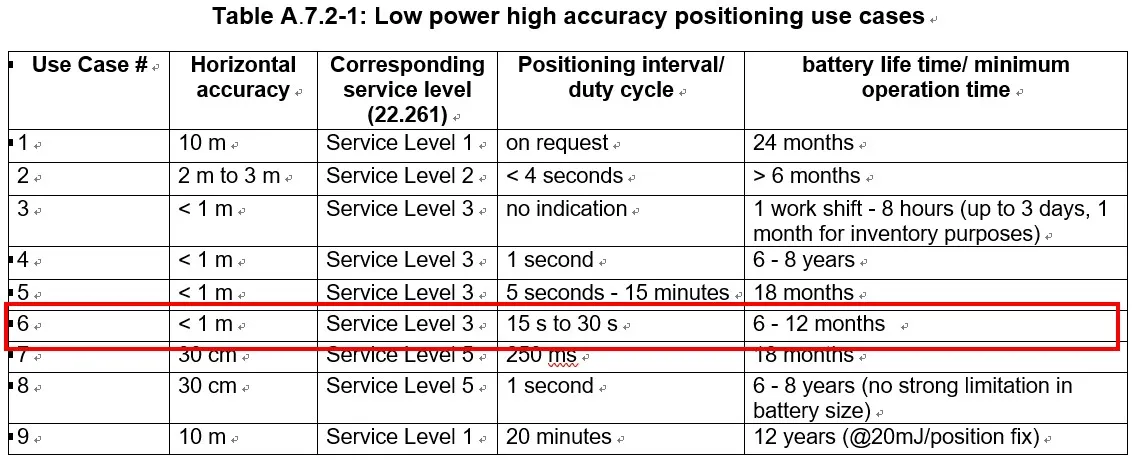
如上表所示,LPHAP定位要求可以总结为:
- 90%的ue水平定位精度< 1米;
- 定位间隔/占空比15-30秒;
- ue电池寿命6个月- 1年;
4. 基于RedCap 的UE定位
RedCap UE定位作为Rel-18定位研究的一个重要部分,在研究初期是基于传统NR RAT定位方式进行性能评估,然后基于这部分仿真结果,识别需要增强的技术。在仿真假设中,FR1下的带宽设置为20MHz,可选5MHz,FR2下的带宽设置为100MHz。其定位性能要求如下:
1.用于室内和室外场景的商业用例
-水平定位精度:90%的ue(< 3米)
-垂直定位精度:90%的ue < 3米
2.对于工业物联网用例:
-水平定位精度:90%的ue < 1m
-垂直定位精度:90%的ue < 3米
(备注:对于上述评估的目标需求,需要注意的是,目标定位需求可能并不一定能够实现所有的场景和用例。此外,并非所有的定位技术都能满足所有场景下的所有定位需求。)
具体地,由于RedCap UE带宽能力较低,因此各公司非常关注跳频(frequency hopping)技术在RedCap定位的应用,包括上行SRS传输hopping和下行PRS接收hopping。在RAN1 112会议中,3GPP确定PRS仅支持下行hopping接收,即网络侧不采用hopping方式传输DL PRS,因为这对现有协议的改动较大。另外,无论是上行SRS hopping还是下行PRS hopping,都被配置在单个SRS/PRS资源内进行,且SRS hopping无论是RRC_connected态还是RRC_inactive态都支持。Redcap UE定位还重点讨论了测量间隔、hopping pattern、上行SRS碰撞和hop间切换时延等问题。
![安装Realtek Audio Driver失败[Error Code:-0001]](https://img-blog.csdnimg.cn/direct/dc72f518611045e5814deba60b0c28e4.png)