全球汽车行业正在进行自动化变革,这将彻底改变交通运输的安全和效率水平。
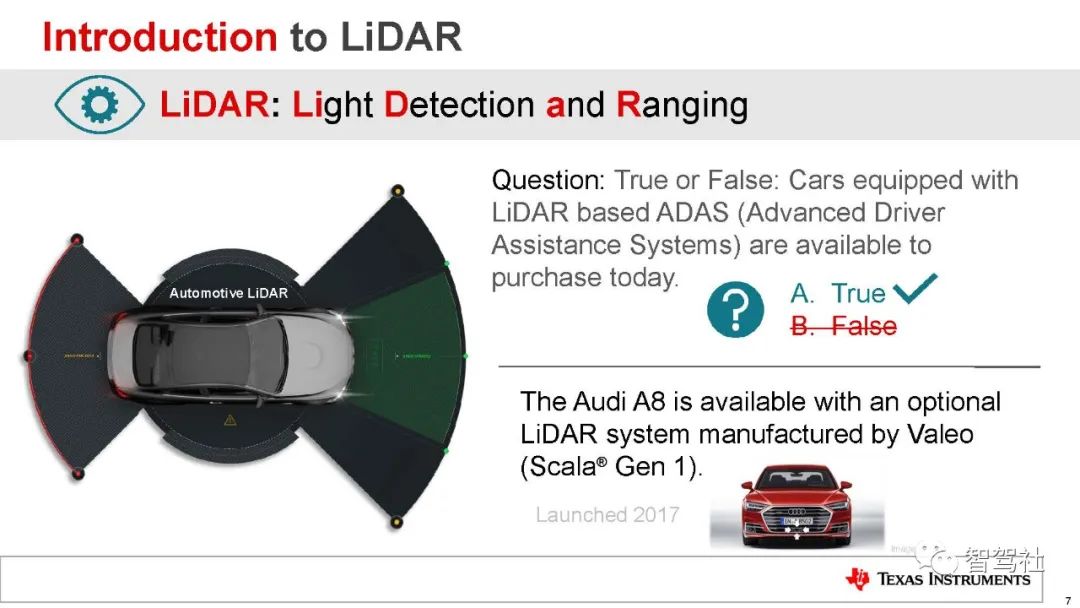
戴姆勒在S级豪华车型中引入L3级自动驾驶(L3,在特定条件下自动驾驶,人类驾驶员一旦被请求就会随时接管)是自动驾驶革命的一个重大突破。其他多家汽车公司已经宣布即将推出这一功能,包括本田和宝马。使用LiDAR(光探测和测距)的3D成像是使之成为可能的关键传感技术。
在过去的8年里,LiDAR公司约50亿美元的投资的主要重点是用于乘车、卡车运输和物流的L4级自动驾驶(不需要人类司机的L4级)。由于技术、安全、监管和成本方面的考虑,实现L4/L5级自动驾驶能力已被证明比最初设想的更具挑战性。在许多情况下,这种能力的货币化的商业案例也被证明是不明确的。对于激光雷达公司来说,这是一个艰难的探索,因为时间跨度较长,而且主要的L4玩家正在开发他们的激光雷达(Waymo、Aurora、Argo)。
完全自动驾驶的目标市场:车辆的数量大大降低(<500万辆/年,而消费者的汽车使用约为1亿辆/年)。汽车原始设备制造商没有能力在完全自动驾驶市场上竞争,他们看到了在他们的汽车上增加有限的自动驾驶功能并向更大的客户群销售舒适、自由时间和安全的产品的机会。这使许多LiDAR公司转向解决L2和L3自动驾驶问题。最近宣布的公司包括法雷奥(奔驰)、Innoviz(宝马)、Luminar(沃尔沃)、Cepton(通用汽车)、Ibeo(长城汽车)和Innovusion(Nio)。与汽车一级供应商的合作关系也已经具体化(Aeye-Continental, Baraja-Veoneer, Cepton-Koito, Innoviz-Magna)。
范围和点密度(点/秒或PPS)是制约LiDAR提供的感知能力的关键性能参数。这些参数包括在足够的范围内对车道标记、交通基础设施、路面、行人、车辆和道路碎片进行探测和分类,以实现安全和舒适的自动操纵。虽然性能是至关重要的,但向消费类汽车的转移促使LiDAR公司也关注更多的 "普通 "特性,如价格、尺寸、功耗、车辆集成/造型、制造可扩展性和安全认证。
美国底特律Autosens的一个小组会议讨论了使消费类车辆能够负担得起LiDAR的价格(或痛苦)门槛。作为参考,汽车摄像头和毫米波雷达的价格分别在10-20美元和50-100美元之间,理想的是LiDAR将达到类似的价格点。这在可预见的未来是不合理的,有几个原因。首先,相机和毫米波雷达已经在消费汽车的ADAS(汽车驾驶辅助系统)方面有着几十年的技术积累和发展。其次,它们主要依赖于硅和CMOS技术,这些技术利用了消费和工业电子的规模。激光雷达没有那么成熟,它依赖于复杂的光学半导体技术(特别是激光器)。这个领域的供应链今天根本没有定位来支持这种定价。
使LiDAR的可接受门槛价格合理化的一种方法是将其与L3级自动驾驶车辆配置的价格联系起来。对于奔驰S级车来说,这个价格大约是5000美元。鉴于LiDAR使这一功能成为可能,有理由认为LiDAR可以获得500美元(或L3选项价格的10%)的价格点。随着中等价位的汽车开始提供这个配置,L3的价格将需要降低(约3000美元),而LiDAR的价格将降低到约300美元。只有当设计运行域(ODD)扩大(在速度、位置、天气等方面),并且在这个演变过程中没有发生重大安全事故时,才有可能出现广泛的客户接受。
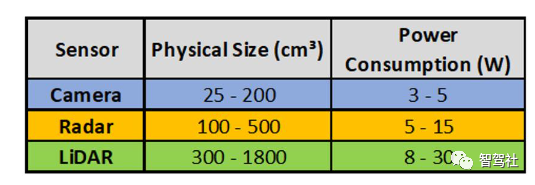
其次,传感器集成必须在不影响消费者汽车的整体风格和情感吸引力的情况下进行。尺寸和功耗制约着传感器的集成位置和方式。传感器(尤其是LiDAR)所消耗的大部分功率被转化为热量。从效率、热管理和缩小尺寸的角度来看,尽量减少热量是有益的。
毫米波雷达传感器的体积为100-500立方厘米,消耗5-15W的功率(取决于性能)。照相机明显更小,更省电(通常在25-200立方厘米的范围内,耗电约3W)。汽车中的空间是宝贵的,随着L2级和L3级功能的发展,LiDAR需要与这些传统的传感器在空间、功率、计算资源和热管理方面进行竞争。
表1比较了LiDAR设计在范围和PPS(点/秒)性能参数方面的尺寸和功耗
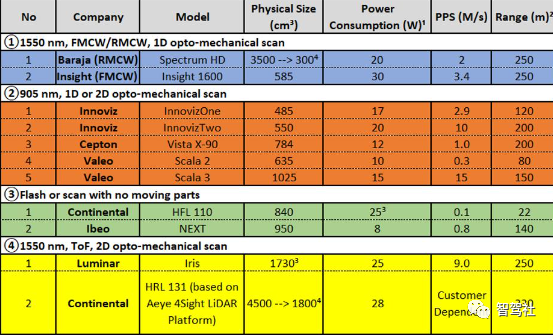
操作物理学、扫描方法和波长是驱动尺寸和功耗的关键因素。表1的主要结论如下。
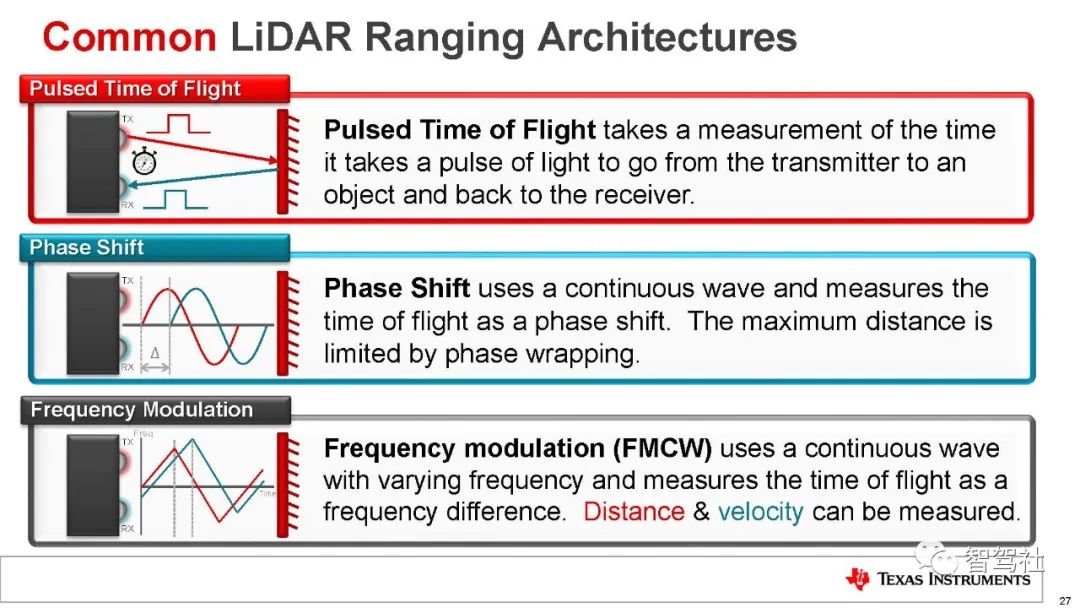
④是最不紧凑的方法。1550nm ToF(飞行时间)操作需要高峰值功率的光纤激光器,它不像半导体二极管激光器那样紧凑。二维扫描和独立的发射/接收孔径也往往使LiDAR的体积更大。
①似乎是最紧凑的方法。FMCW/RMCW(频率/随机调制连续波)使用同调检测(将一部分发射光束与接收光束光学混合)。这允许使用与半导体光放大器集成的二极管激光器。光机械扫描发生在一个维度上(水平方向)。垂直扫描是通过可调谐激光器和类似棱镜的光学器件(没有移动部件)完成的。它还使用了一个单静止结构(通过一个光圈进行发射/接收)。
与905纳米(②)相比,1550纳米LiDAR(①和④)消耗更高的功率,但也提供更高的范围性能。较高的功率消耗是由多种因素造成的。首先,激光器被允许以更高的光功率驱动(1550纳米的眼睛安全阈值比905纳米的高得多)。其次,1550纳米的激光器效率较低,消耗更多的电功率。最后,由于温度敏感性较高,1550纳米激光器需要被冷却或温度稳定。这就消耗了电力。
LiDAR射程和PPS性能的世代改进(Innoviz和Valeo在②)增加了电力消耗。这是可以理解的,因为更高的性能需要更多的激光功率、占空比和空间频率。信号处理计算能力也会增加。在这些情况下,尺寸似乎与功耗的增加成正比。
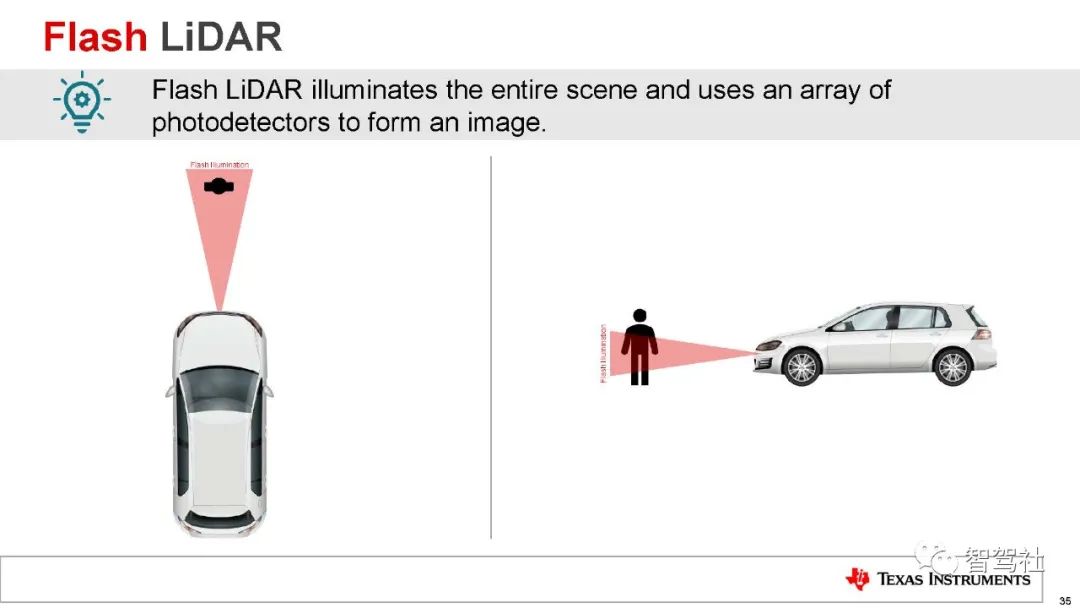
相对于Flash LiDAR(③)提供的适度性能,它在尺寸和功耗方面是昂贵的。如果消除移动部件是一个关键的考虑因素(可靠性或集成度),那么使用电子扫描的架构就更有吸引力(③),因为它们在同等大小的情况下能提供明显更高的性能,并大大降低功耗。折衷的办法是,全局快门操作是不可能的,从而导致点云的模糊效应。
LiDAR在集成度、尺寸和功耗方面正在逐渐成熟。相对于毫米波雷达,它在尺寸和功耗方面仍然是~2-3倍大。成像相机甚至更紧凑、更省电(尺寸低10倍,功率低5倍)。
随着时间的推移,LiDAR是否会达到与这些其他传感器同等的水平?1550纳米的FMCW/RMCW LiDAR(①)一旦在硅光子学平台上实现了芯片级的二维光学扫描,就能提供与雷达同等尺寸的最佳潜力(这是目前积极研究的领域,但在实际中还不可行)。功耗不可能降低,因为基本的激光技术需要有重大的材料改进(在过去的三十年里,为了支持光纤通信,已经在这个领域进行了大量的投资,而且不太可能有巨大的改进)。功率消耗的主要部分是由激光器引起的,其中70%以上被转化为热量,需要加以管理。这反过来又对尺寸设定了一个下限。
要确保像LiDAR这样复杂的光机械传感器能够从原型到大批量生产的扩展,需要在设计的早期阶段考虑供应链和可制造性。在这方面,LiDAR公司和一级供应商(他们已经掌握了有效扩展到批量生产的流程和科学)之间的伙伴关系是非常宝贵的。
法雷奥公司设计和制造其LiDAR(SCALA系列)。在Autosens,他们提出了影响设计过程的考虑因素--技术选择、供应商、工艺简单性、成本、可靠性和可扩展性。周期时间和废品水平得到了严格的分析和验证。法雷奥的理念是推出满足当前汽车客户需求的 "适合功能 "的设计(最初可能在性能上不领先于竞争对手,但对客户来说是可靠和易于部署的),将这些设计投入批量生产,并将规模化和低成本的经验作为未来设计的性能升级的基础。迄今为止,已经生产了超过17万个汽车级LiDAR(跨越SCALA 1和2系列,SCALA 2目前是在前面讨论的奔驰S级中设计的)。SCALA 3利用这一经验,性能显著提高,将于2023年推出。法雷奥的方法与许多风险投资的LiDAR公司不同,这些公司最初往往专注于最大限度地提高性能,并假设一旦产量增加,规模和成本要求将得到解决。这是一个困难的主张。
希捷科技是一家大型的硬盘驱动器(HDD)制造商,每年生产超过1亿台。在Autosens会议上,他们介绍并演示了他们的LiDAR,这是一个1550纳米的系统,能够实现动态凹陷,120°视场,250米范围和25W的功耗。该公司首创了HAMR(热辅助磁记录),用于增加硬盘的存储容量。安装在记录头上的激光二极管被用来局部加热单个比特,以翻转磁极并协助写入过程。光学、精密机械、高速电子和扫描是关键的设计平台。硬盘制造线利用光学、机械和电子部件的精确定位(亚微米)和粘合,以及高产量的在线和最终测试。希捷公司的战略是利用其HDD产品的专利、相关技术块和制造基础设施,用于汽车LiDAR。在拥挤的LiDAR生态系统中,希捷公司可能不同于其他任何加入者。他们从现有的高产量、低成本的生产线开始,将类似复杂性的产品设计插入其中。他们可能在未来颠覆LiDAR市场。
Trioptics介绍了为汽车市场大批量制造LiDAR的一些制造设备挑战。光学、机械和电子元件的精确对准和粘合是高产量LiDAR制造的关键,同样也是在非常低的周期时间内校准和测试子组件和最终产品的能力。关键是要确保每一个子组件的设计和采购都有足够的精度水平和基准点,以便机器人自动化能够有效地发挥作用。Trioptics公司正在为LiDAR的生产建立商业化的设备,他们的主张与20年前基于光纤的通信系统的扩展类似。它催生了一个专门用于制造光电子元件的专业设备行业,包括预烧/测试、光纤对准/连接、芯片/导线粘接、密封和可靠性测试系统。
对传感器安全认证的两个关键标准的方法:ISO 26262功能安全标准和新兴的ISO 21448标准,涉及预期功能安全(SOTIF)。后者涉及一个特定的车辆功能在承诺的ODD中的表现。对于像LiDAR这样的新传感器,在不利的照明和天气条件下,将其转化为物体检测和分类(例如车辆、行人、障碍物和交通基础设施)是至关重要的。LiDAR供应商越来越关注这个新标准,尽管目前还不清楚这是否是由OEM或Tier 1承担的事情。
汽车LiDAR无疑已经到来。虽然L4自动驾驶市场还很遥远,但需要LiDAR的有限自动驾驶水平(L2和L3)提供了一个更有利可图的近期机会。设计的机会是有限的,对这些机会的竞争是残酷的。赢得这些机会将需要在性能、成本、可靠性和易于集成方面提供正确的平衡。
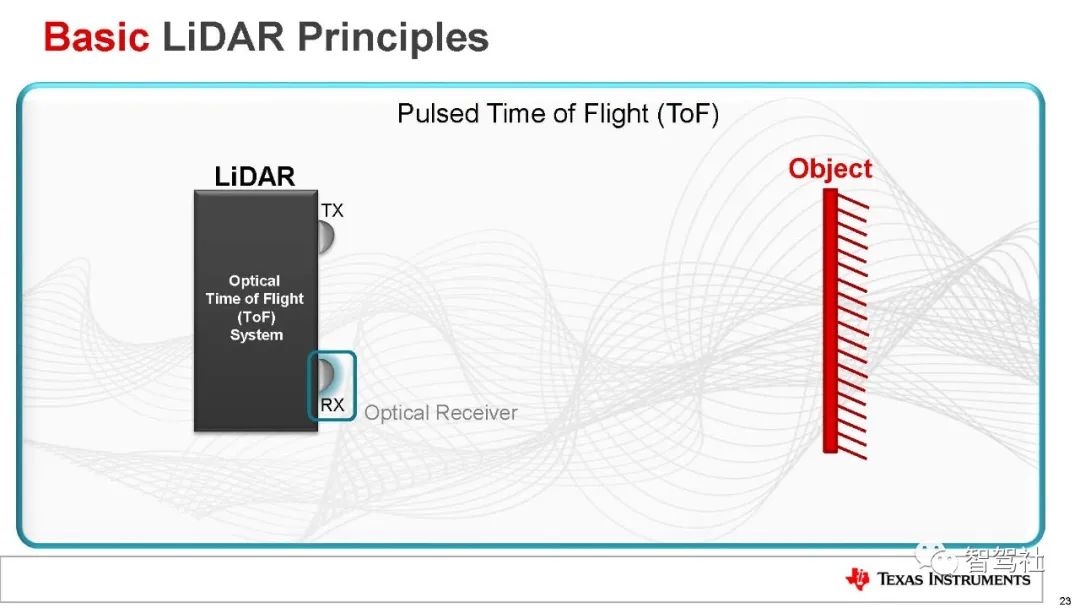
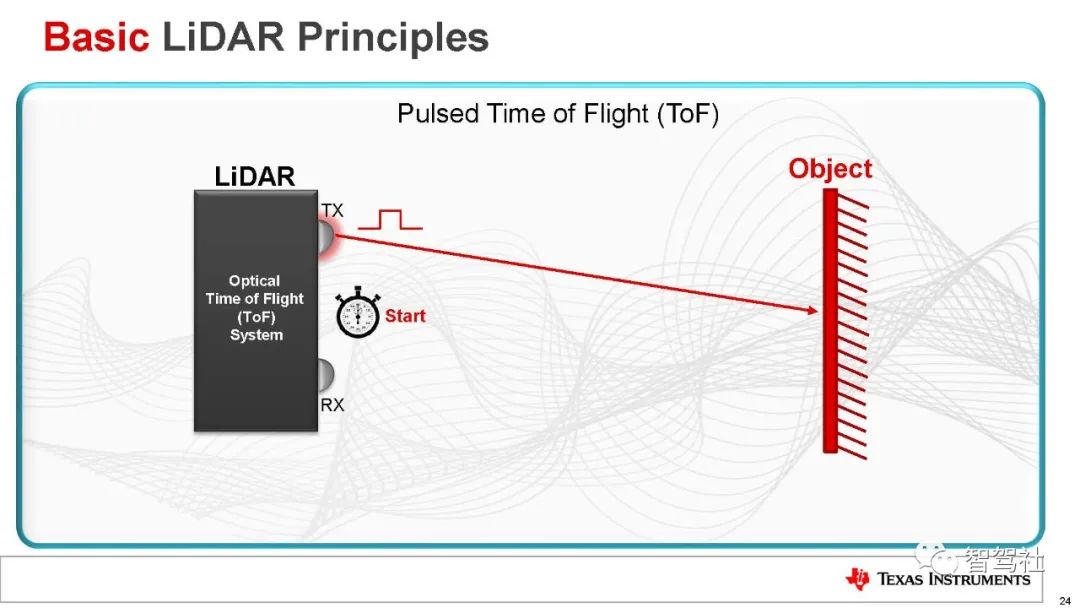
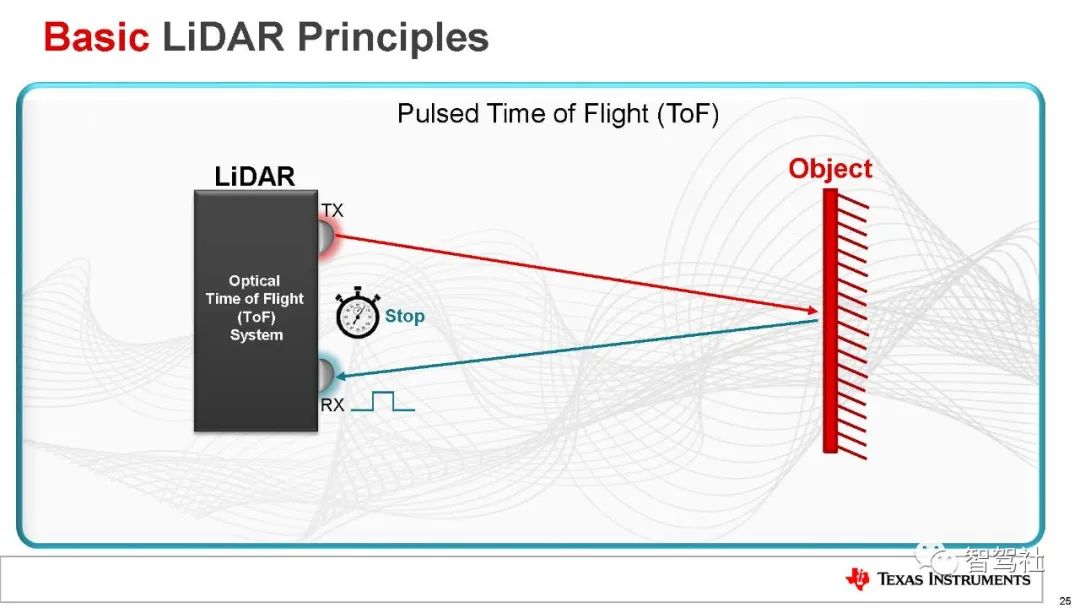
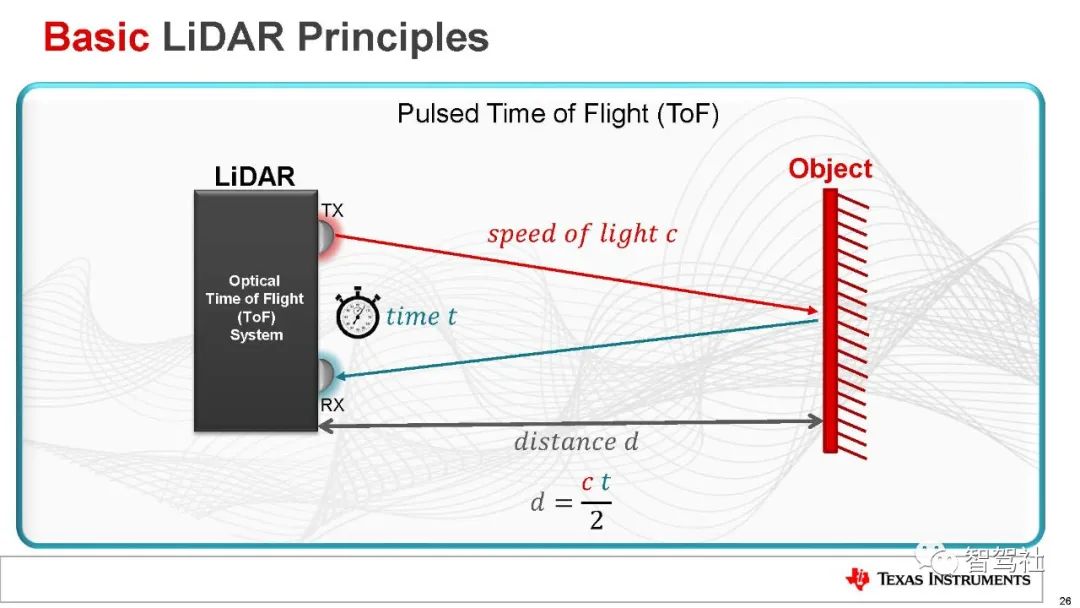
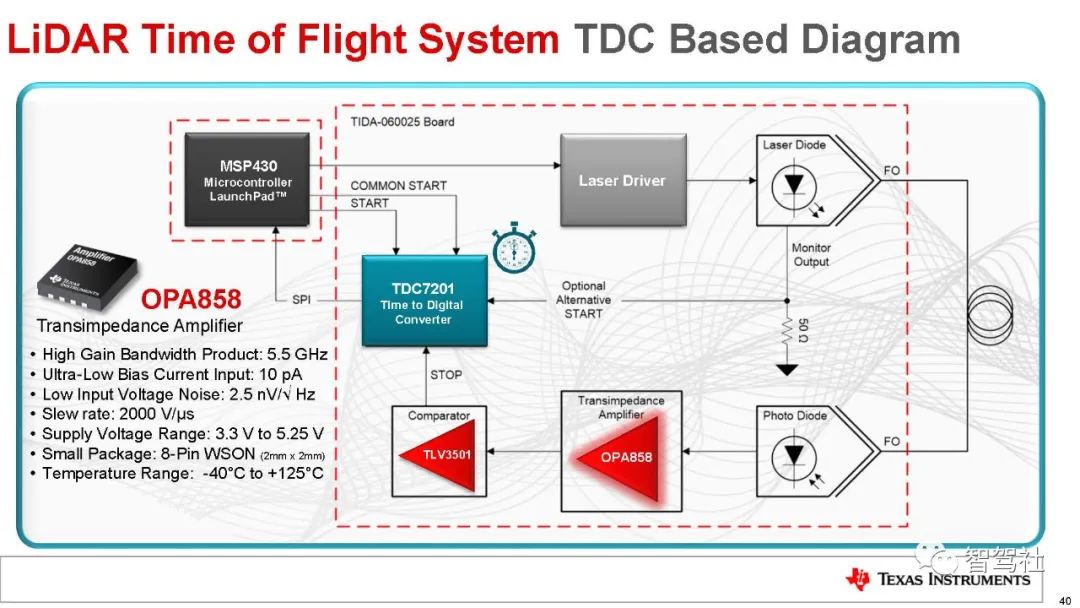
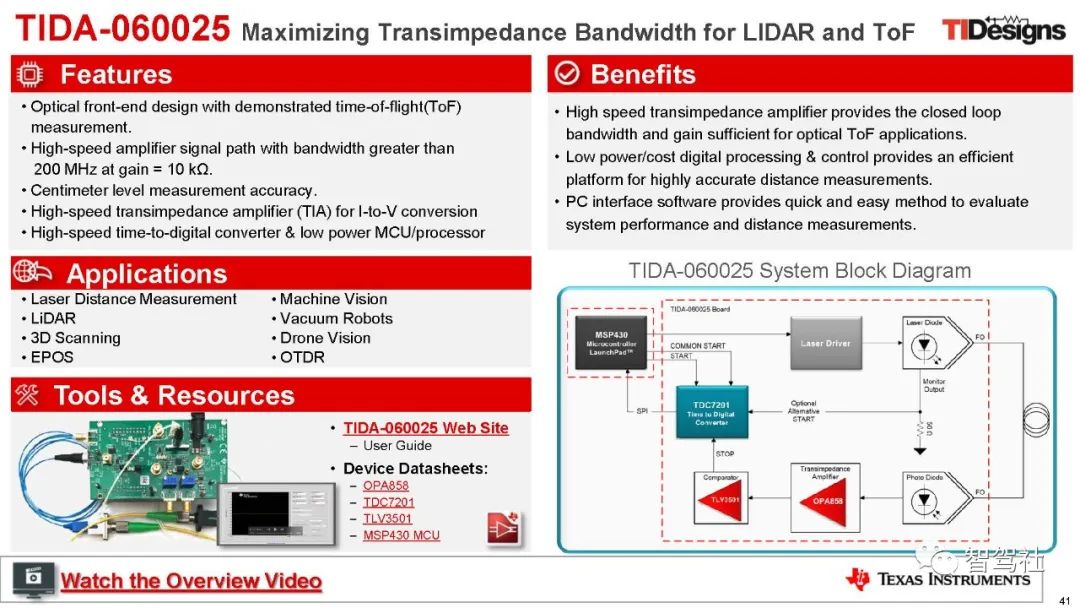
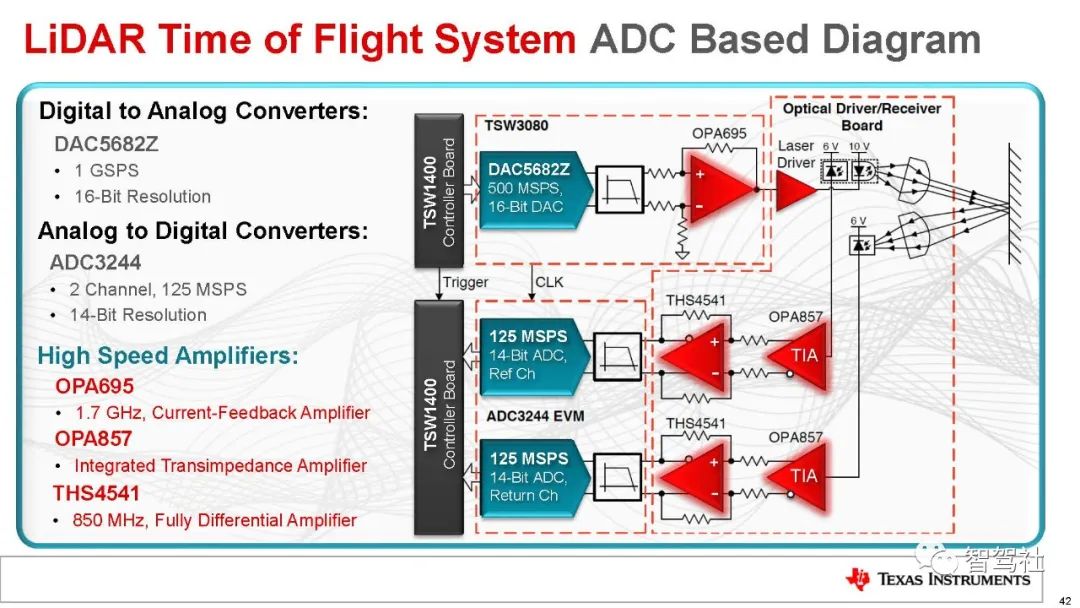
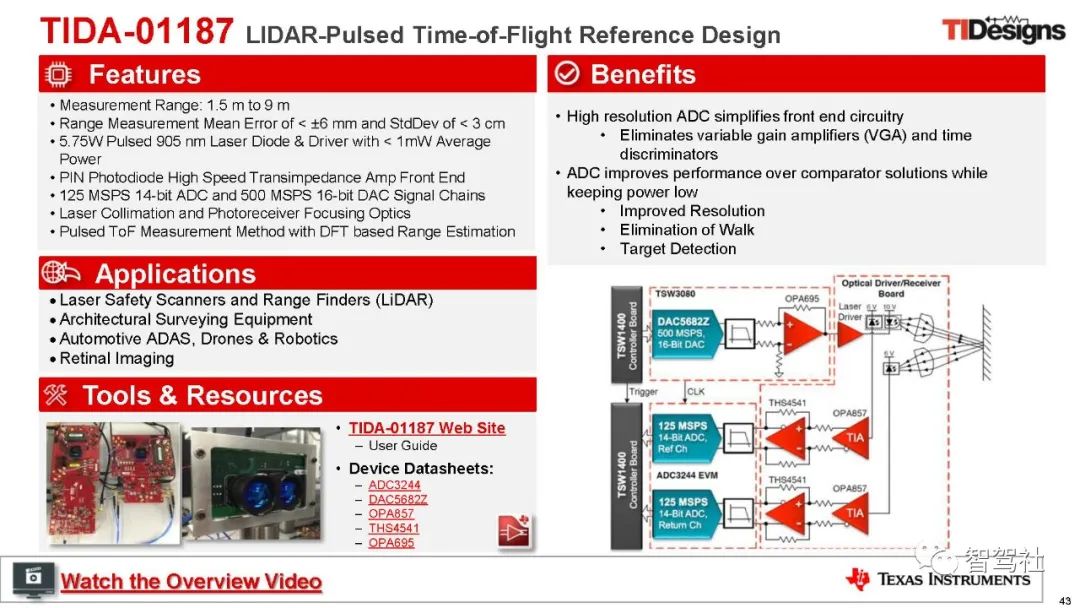
下文是TI关于激光雷达的介绍PPT欢迎大家关注,一起学习。