本发明公开了一种基于2D工业相机的工件目标检测及三维姿态判定方法,首先根据待生产或是待加工工件目标搭建其三维几何模型,并标记该几何模型制定特征点,然后对通过两个2D工业相机分别获得的现场工件目标图像进行目标检测及特征识别,通过该特征与几何模型中特征点的匹配对比,从而获取工件目标空间姿态信息。相较于采用3D相机或多个(3个以上)2D工业相机获取目标特征点的方法,降低了成本。
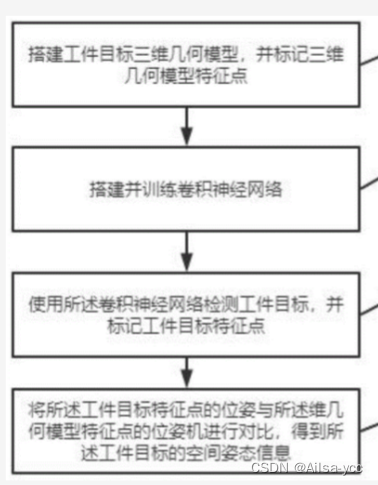
本发明公开了一种基于2D工业相机的工件目标检测及三维姿态判定方法,首先根据待生产或是待加工工件目标搭建其三维几何模型,并标记该几何模型制定特征点,然后对通过两个2D工业相机分别获得的现场工件目标图像进行目标检测及特征识别,通过该特征与几何模型中特征点的匹配对比,从而获取工件目标空间姿态信息。相较于采用3D相机或多个(3个以上)2D工业相机获取目标特征点的方法,降低了成本。
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/1478944.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!









![[云原生] K8s之pod进阶](https://img-blog.csdnimg.cn/direct/7de92bce0bd4411b8a68e87e79881bc0.png)