文章目录
- 前言
- 一、opengles 常用的模型矩阵
-
- 1. 单位矩阵
- 2. 缩放矩阵
- 3. 位移矩阵
- 4. 旋转矩阵
- 二、第三方矩阵数学库
-
- 1. glm
-
- 1.1 ubuntu 上安装 glm 库
- 1.2 glm 使用实例
-
- 1.2.1 生成一个沿Y轴旋转45度的4x4旋转矩阵, 代码实例如下
- 1.2.2 生成一个将物体移到到Z轴正方向坐标为5处的4x4 view视图矩阵, 代码实例如下
- 1.2.3 生成一个视野角度为45度的4x4 投影矩阵, 代码实例如下
- 2. mail opengles SDK 中的 Matrix.c 和 Matrix.h
- 总结
- 参考资料
前言
本文主要介绍 opengles 常用的 model 矩阵(包括用于位移, 缩放,旋转的4x4 矩阵),以及使用第三方的封装库生成 opengles 的 model ,view, projection(模型,视图,投影)矩阵。
软硬件环境:
硬件:PC
软件:ubuntu22.04 opengles3.0
一、opengles 常用的模型矩阵
1. 单位矩阵
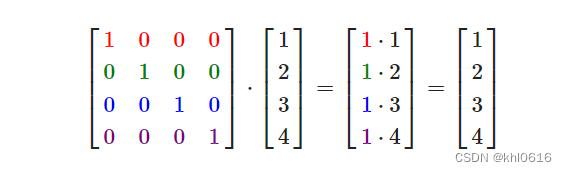
在顶点 shader 语句中,如果没有指定 model 矩阵,那么就会使用默认的 model 矩阵,默认的 model 矩阵是一个单位矩阵
在OpenGLES中,由于某些原因我们通常使用4×4的变换矩阵,而其中最重要的原因就是大部分的向量都是4分量的。我们能想到的最简单的变换矩阵就是单位矩阵(Identity Matrix)。单位矩阵是一个除了对角线以外都是0的N×N矩阵。在下式中可以看到,这种变换矩阵使一个向量完全不变
2. 缩放矩阵
我们从单位矩阵了解到,每个对角线元素会分别与向量的对应元素相乘。如果我们把1变为3会怎样?这样子的话,我们就把向量的每个元素乘以3了,这事实上就把向量缩放3倍。如果我们把缩放变量表示为(S1,S2,S3),我们可以为任意向量(x,y,z)定义一个缩放矩阵:

3. 位移矩阵
和缩放矩阵一样,在4×4矩阵上有几个特别的位置用来执行特定的操作,对于位移来说它们是第四列最上面的3个值。如果我们把位移向量表示为(Tx,Ty,Tz),我们就能把位移矩阵定义为:

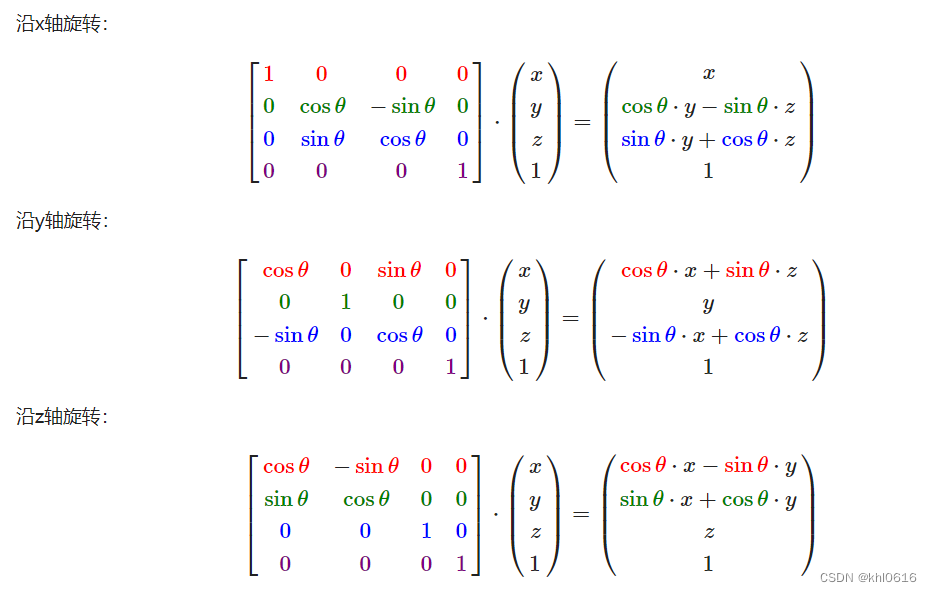
4. 旋转矩阵
旋转矩阵在3D空间中每个单位轴都有不同定义,旋转角度用θ表示:
二、第三方矩阵数学库
1. glm
- glm是一个C++数学库,用于进行OpenGL开发时常用的数学计算,例如向量、矩阵、四元数等。它提供了许多方便的函数和工具,可以简化在OpenGL程序中进行数学计算的过程。
- 在OpenGL开发中,通常使用glm来进行模型变换、投影变换、法线变换等数学运算。glm库中包含了许多常用的数学函数和数据结构,使得开发者能够更轻松地处理3D图形编程中的数学问题。例如,您可以使用glm::mat4表示4x4的矩阵,glm::vec3表示三维向量,glm::quat表示四元数等。glm还提供了丰富的数学函数,如矩阵乘法、向量点乘、向量叉乘等,以及各种变换函数,如旋转、平移、缩放等。
- 在使用 glm之前,您需要包含适当的 glm 头文件(glm 库就是一个头文件,没有.so
库),通常情况下,您可以直接在代码中使用glm提供的函数和数据结构,从而简化数学计算的过程。
1.1 ubuntu 上安装 glm 库
在ubuntu 上可以通过 sudo apt intstall libglm-dev 命令来安装 glm 库文件,如下图所示

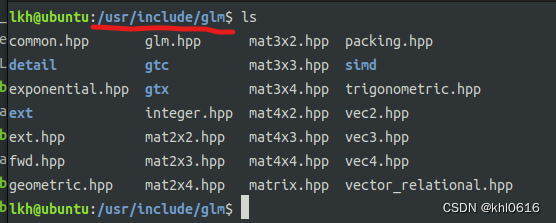
安装成功后,在 /usr/include/glm/ 目录下就可以看到 glm 相关的头文件了,如下图所示
1.2 glm 使用实例
如下是几个使用 glm 生成 opengles 相关的4x4 model ,view, projection 矩阵的实例
1.2.1 生成一个沿Y轴旋转45度的4x4旋转矩阵, 代码实例如下
test_glm1.cpp
#include <iostream>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
int main() {
float angleY = 45.0f; // 45度角度
glm::mat4 rotationMatrix = glm::mat4(1.0f); // 初始化为单位矩阵
// 绕Y轴旋转45度
rotationMatrix = glm::rotate(rotationMatrix, glm::radians(angleY), glm::vec3(0.0f, 1.0f, 0.0f));
// 打印结果
std::cout << "Rotation Matrix:" << std::endl;
for (int i = 0; i < 4; i++) {
for (int j = 0; j < 4; j++) {
std::cout << rotationMatrix[i][j] << " ";
}
std::cout << std::endl;
}
return 0;
}
编译命令:g++ test_glm1.cpp -o test_glm1
生成结果:执行 ./test_glm1 命令打印生成的矩阵结果如下:
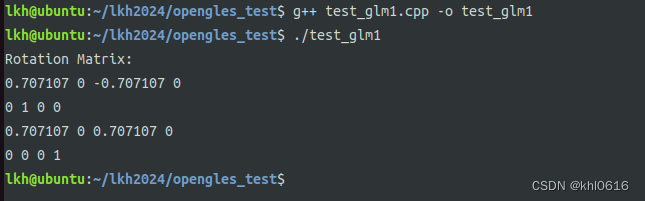
其中这个0.707107 就是 cos45° 和 sin45° 的值
1.2.2 生成一个将物体移到到Z轴正方向坐标为5处的4x4 view视图矩阵, 代码实例如下
test_glm2.cpp
#include <iostream>
#include <glm/glm.hpp>
#include <glm/gtc/matrix_transform.hpp>
#include <glm/gtc/type_ptr.hpp>
int main() {
glm::mat4 viewMatrix = glm::mat4(1.0f); // 初始化为单位矩阵
// 将视点移动到 Z 轴 5 处
viewMatrix = glm::translate(viewMatrix, glm::vec3(0.0f, 0.0f, -5.0f));
// 打印结果
std::cout << "View Matrix:" << std::