open3d KD-Tree K近邻点搜索
- 一、算法原理
- 1.KD-Tree 介绍
- 2.原理
- 二、代码
- 三、结果
- 1.原点云
- 2.k近邻点搜索后的点云
- 四、相关数据
一、算法原理
1.KD-Tree 介绍
kd 树或 k 维树是计算机科学中使用的一种数据结构,用于在具有 k 维的空间中组织一定数量的点。它是一个二叉搜索树,对其施加了其他约束。Kd 树对于范围和最近邻搜索非常有用。出于我们的目的,我们通常只会处理三维的点云,因此我们所有的 kd 树都是三维的。kd 树的每一层使用垂直于相应轴的超平面沿特定维度拆分所有子节点。在树的根部,所有子节点都将根据第一维进行拆分(即,如果第一维坐标小于根,它将在左子树中,如果大于根,则显然将在左子树中右子树)。树中的每一层都在下一个维度上进行划分,一旦所有其他维度都用尽,则返回到第一个维度。构建 kd 树的最有效方法是使用像 Quick Sort 那样的分区方法,将中点放在根处,将一维值较小的所有内容放在左侧,右侧较大。然后在左子树和右子树上重复此过程,直到要分区的最后一棵树仅由一个元素组成。
来自[维基百科]:
这是一个二维 KD-Tree的例子

这是最近邻搜索如何工作的演示

这是最近邻搜索如何工作的演示原理
2.原理
- KD-Tree构建: 首先,选择一个数据集中的点作为根节点,并根据这个点的一个坐标轴(通常是数据维度中的一个)将数据集分成两个子集。然后,对每个子集递归地应用相同的过程,选择该子集中的一个点作为子树的根节点,并使用另一个坐标轴来分割子集。这个过程一直持续下去,直到每个子集的大小达到某个阈值,或者直到无法再分割为止。
- 节点分割: 在每一层中,
kd-Tree选择一个坐标轴,然后根据该坐标轴上的中位数将数据集分成两半。这个过程使得树的每个节点都代表一个超矩形区域,其中包含了数据集的部分或全部点。 - 最近邻搜索: 在搜索时,从根节点开始,根据目标点的坐标与当前节点表示的超矩形区域的关系,递归地向下搜索。当搜索到达叶节点时,将该叶节点中的点与目标点进行比较,选择距离最近的点。然后,回溯到父节点,检查是否存在可能更近的点,如果存在,则继续向上回溯,直到搜索完成。
二、代码
import numpy as np
import open3d as o3d
if __name__ == '__main__':
pcd = o3d.io.read_point_cloud('res/bunny.pcd')
o3d.visualization.draw_geometries([pcd])
pcd.paint_uniform_color([0.5, 0.5, 0.5]) # 把所有点渲染为灰色(灰兔子)
pcd_tree = o3d.geometry.KDTreeFlann(pcd) # 建立KD树索引
point = pcd.points[1200] # 设置索引点
k = 400 # 查询邻点数目
[k, idx, _] = pcd_tree.search_knn_vector_3d(point, k) # K近邻搜索
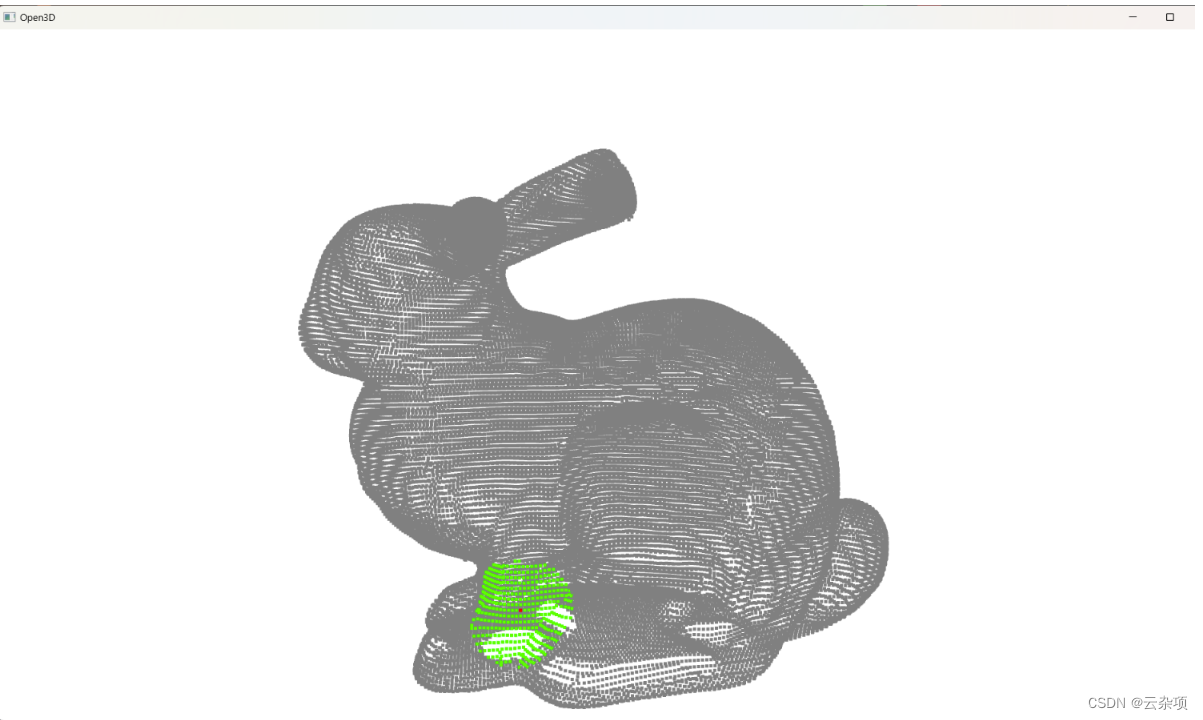
pcd.colors[1200] = [1, 0, 0] # 设置索引点为红色
np.asarray(pcd.colors)[idx[1:], :] = [0, 1, 0] # K邻域的点,渲染为绿色
o3d.visualization.draw_geometries([pcd])
三、结果
1.原点云
2.k近邻点搜索后的点云
四、相关数据
点云中的numpy:https://blog.csdn.net/m0_73126623/article/details/136123207
测试数据下载链接:https://pan.baidu.com/s/1uT6UbzU5h7wPurnQYUB7TQ
提取码:lsyg