目录
- 关键词
- 平台说明
- 一、车身CAN简介
- 二、相关模块
- 三、Can报文分类及信号流路径
- 3.1 应用报文
- 3.2 应用报文(多路复用multiplexer)
- 3.3 诊断报文
- 3.4 网络管理报文
- 3.5 XCP报文(标定报文)
关键词
嵌入式、C语言、autosar、OS、BSW
平台说明
| 项目 | Value |
|---|---|
| OS | autosar OS |
| autosar厂商 | vector , |
| 芯片厂商 | TI 英飞凌 |
| 编程语言 | C,C++ |
| 编译器 | HighTec (GCC) |

>>>>>回到总目录<<<<<<
一、车身CAN简介
CAN总线是目前汽车上用的最广,技术最为成熟的一种总线。CAN总线的出现,很好的解决了众多功能模块控制单元之间的数据交换实时性和稳定性问题。在没有CAN总线出现之前,众多功能模块控制单元之间的数据交换只能通过一条条铜缆线传递单一的数据信号,实时性和稳定性都需要提高。
二、相关模块

三、Can报文分类及信号流路径
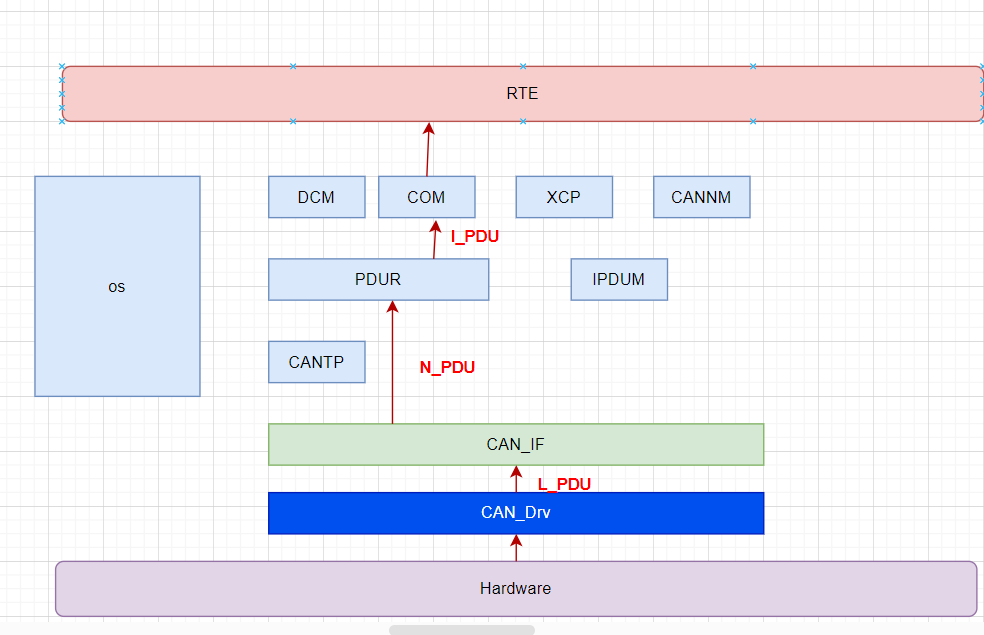
Can报文分为4类:应用报文,诊断报文,网络管理报文,XCP报文。不同作用的报文其在协议栈中有不同的信号流路径。
3.1 应用报文
CAN->CANIF->PDUR->COM
3.2 应用报文(多路复用multiplexer)
CAN->CANIF->PDUR->IPDUM->PDUR->COM

3.3 诊断报文
CAN->CANIF->CANTP->PDUR->DCM

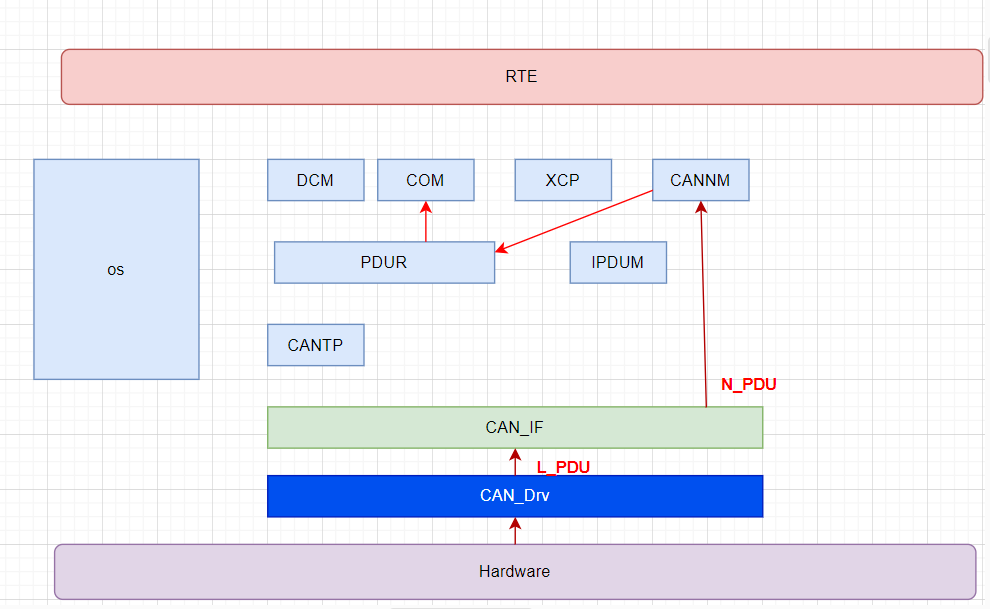
3.4 网络管理报文
CAN->CANIF->CANNM->PDUR->com
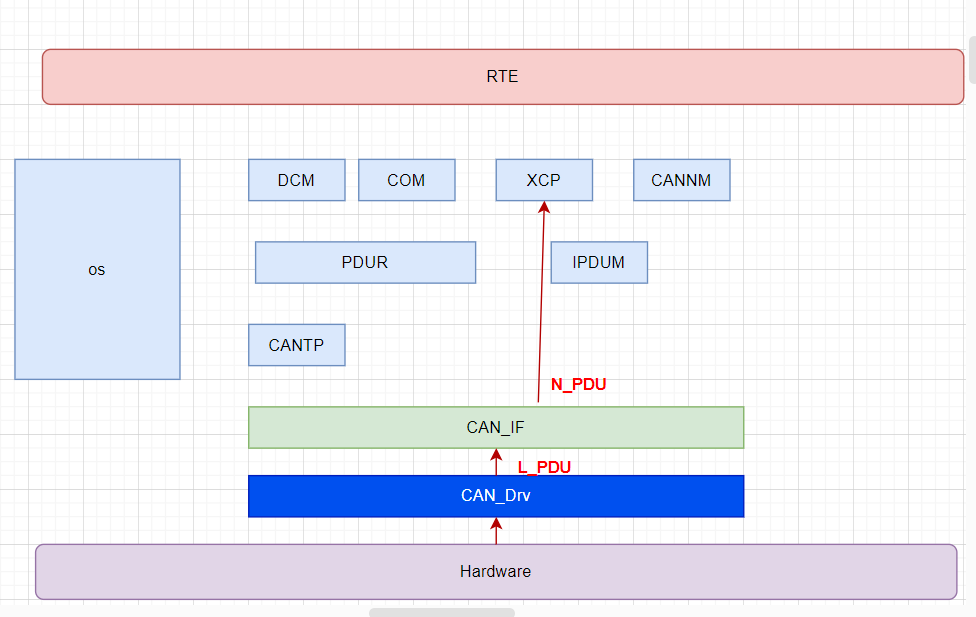
3.5 XCP报文(标定报文)
CAN->CANIF->XCP
>>>>>回到总目录<<<<<<




![cookie伪造 [BSidesCF 2019]Kookie1](https://img-blog.csdnimg.cn/direct/1ddb7336cd3d47fbadd7a94ec921dffe.png)