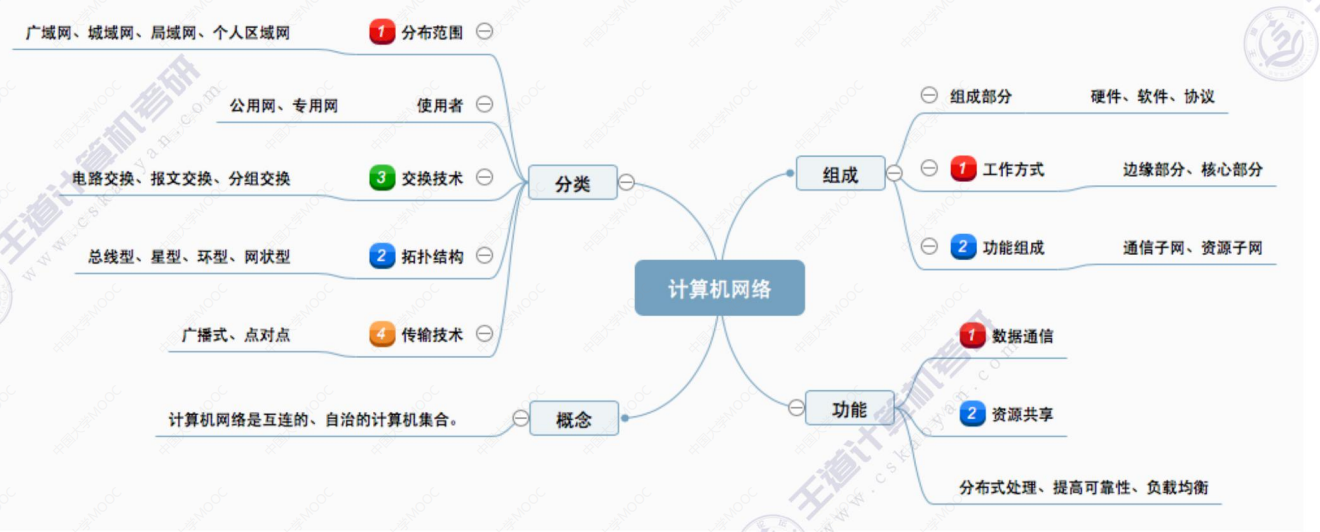
在第一篇文章中我们提到“在encoder部分,主要包括了backbone(DCNN)、ASPP两大部分”,在这里的backbone就是mobilenetv2网络结构和xception网络结构,而ASPP结构就是深层网络结构,其网络结构如下:
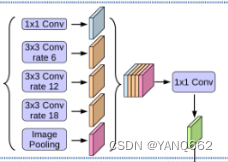
ASPP网络结构的原理其实很简单,可以看博文1.deeplabv3+网络结构及原理-CSDN博客,该博文有介绍。以上网络结构里的rate表示空洞卷积核的大小,显然,该网络结构总共5层卷积处理,之后再将不同的层用concat堆叠,最后再用1x1的卷积核整合特征,转换为图片中绿色的层。
下面深层网络结构的代码如下:
#-----------------------------------------#
# ASPP特征提取模块
# 利用不同膨胀率的膨胀卷积进行特征提取
#-----------------------------------------#
class ASPP(nn.Module):
def __init__(self, dim_in, dim_out, rate=1, bn_mom=0.1):
super(ASPP, self).__init__()
self.branch1 = nn.Sequential(
nn.Conv2d(dim_in, dim_out, 1, 1, padding=0, dilation=rate, bias=True),
nn.BatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
self.branch2 = nn.Sequential(
nn.Conv2d(dim_in, dim_out, 3, 1, padding=6 * rate, dilation=6 * rate, bias=True),
nn.BatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
self.branch3 = nn.Sequential(
nn.Conv2d(dim_in, dim_out, 3, 1, padding=12 * rate, dilation=12 * rate, bias=True),
nn.BatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
self.branch4 = nn.Sequential(
nn.Conv2d(dim_in, dim_out, 3, 1, padding=18 * rate, dilation=18 * rate, bias=True),
nn.BatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
self.branch5_conv = nn.Conv2d(dim_in, dim_out, 1, 1, 0, bias=True)
self.branch5_bn = nn.BatchNorm2d(dim_out, momentum=bn_mom)
self.branch5_relu = nn.ReLU(inplace=True)
self.conv_cat = nn.Sequential(
nn.Conv2d(dim_out * 5, dim_out, 1, 1, padding=0, bias=True),
nn.BatchNorm2d(dim_out, momentum=bn_mom),
nn.ReLU(inplace=True),
)
def forward(self, x):
[b, c, row, col] = x.size()
# -----------------------------------------#
# 一共五个分支
# -----------------------------------------#
conv1x1 = self.branch1(x)
conv3x3_1 = self.branch2(x)
conv3x3_2 = self.branch3(x)
conv3x3_3 = self.branch4(x)
# -----------------------------------------#
# 第五个分支,全局平均池化+卷积
# -----------------------------------------#
global_feature = torch.mean(x, 2, True)
global_feature = torch.mean(global_feature, 3, True)
global_feature = self.branch5_conv(global_feature)
global_feature = self.branch5_bn(global_feature)
global_feature = self.branch5_relu(global_feature)
global_feature = F.interpolate(global_feature, (row, col), None, 'bilinear', True)
# -----------------------------------------#
# 将五个分支的内容堆叠起来
# 然后1x1卷积整合特征。
# -----------------------------------------#
feature_cat = torch.cat([conv1x1, conv3x3_1, conv3x3_2, conv3x3_3, global_feature], dim=1)
result = self.conv_cat(feature_cat)
return result




![[linux]进程间通信(IPC)———共享内存(shm)(什么是共享内存,共享内存的原理图,共享内存的接口,使用演示)](https://img-blog.csdnimg.cn/direct/bc619ee07ca34a1cac56b6dae55988f1.png)