简介:
- 该系统显示器为LCD1602,可实时显示波形的参数情况
- 可显示四种波形,分别是正弦波 三角波方波以及锯齿波
- 该系统可以通过按键调节波形的占空比
- 波形输出通过仿真软件的示波器可以查看得到
- 波形发生器的核心芯片是利用DAC0832产生+运放LM324经过放大之后输出
- 其中正弦波和方波输出频率范围100-180HZ,三角波范围为180-500HZ,锯齿波范围也是180-500HZ
- 在使用的过程中需要注意的是刚切换波形的时候,LCD上的显示频率还不稳定,需要按频率降低按键来操作回到正常值
DAC0832芯片的简要介绍:
DAC0832是双列直插式8位D/A转换器。能完成数字量输入到模拟量(电流)输出的转换。图1-1和图1-2分别为DAC0832的引脚图和内部结构图。
其主要参数如下:分辨率为8位,转换时间为1μs,满量程误差为±1LSB,参考电压为(+10~-10)V,供电电源为(+5~+15)V,逻辑电平输入
与TTL兼容。从图1-1中可见,在DAC0832中有两级锁存器,第一级锁存器称为输入寄存器,它的允许锁存信号为ILE,第二级锁存器称为DA
C寄存器,它的锁存信号也称为通道控制信号 /XFER。
图1-1中,当ILE为高电平,片选信号 /CS 和写信号 /WR1为低电平时,输入寄存器控制信号为1,这种情况下,输入寄存器的输出随输入而
变化。此后,当 /WR1由低电平变高时,控制信号成为低电平,此时,数据被锁存到输入寄存器中,这样输入寄存器的输出端不再随外部数
据DB的变化而变化。
对第二级锁存来说,传送控制信号 /XFER 和写信号 /WR2同时为低电平时,二级锁存控制信号为高电平,8位的DAC寄存器的输出随输入而
变化,此后,当 /WR2由低电平变高时,控制信号变为低电平,于是将输入寄存器的信息锁存到DAC寄存器中。
图1-1中其余各引脚的功能定义如下:
(1)、DI7~DI0 :8位的数据输入端,DI7为最高位。
(2)、IOUT1 :模拟电流输出端1,当DAC寄存器中数据全为1时,输出电流最大,当 DAC寄存器中数据全为0时,输出电流为0。
(3)、IOUT2 :模拟电流输出端2, IOUT2与IOUT1的和为一个常数,即IOUT1+IOUT2=常数。
(4)、RFB :反馈电阻引出端,DAC0832内部已经有反馈电阻,所以 RFB端可以直接接到外部运算放大器的输出端,这样相当于将一个反馈
电阻接在运算放大器的输出端和输入端之间。
(5)、VREF :参考电压输入端,此端可接一个正电压,也可接一个负电压,它决定0至255的数字量转化出来的模拟量电压值的幅度,VREF
范围为(+10~-10)V。VREF端与D/A内部T形电阻网络相连。
(6)、Vcc :芯片供电电压,范围为(+5~ 15)V。
(7)、AGND :模拟量地,即模拟电路接地端。
(8)、DGND :数字量地。
LM324的简要介绍:
LM324是四运放集成电路,它采用14脚双列直插塑料封装,外形如图所示。它的内部包含四组形式完全相同的运算放大器,
除电源共用外,四组运放相互独立。
每一组运算放大器可用图1所示的符号来表示,它有5个引出脚,其中“+”、“-”为两个信号输入端,“
V+”、“V-”为正、负电源端,“Vo”为输出端。两个信号输入端中,Vi-(-)为反相输入端,表示运放输出端Vo的信号
与该输入端的相位相反;Vi+(+)为同相输入端,表示运放输出端Vo的信号与该输入端的相位相同。LM324的引脚排列见图2。
下面是仿真图:

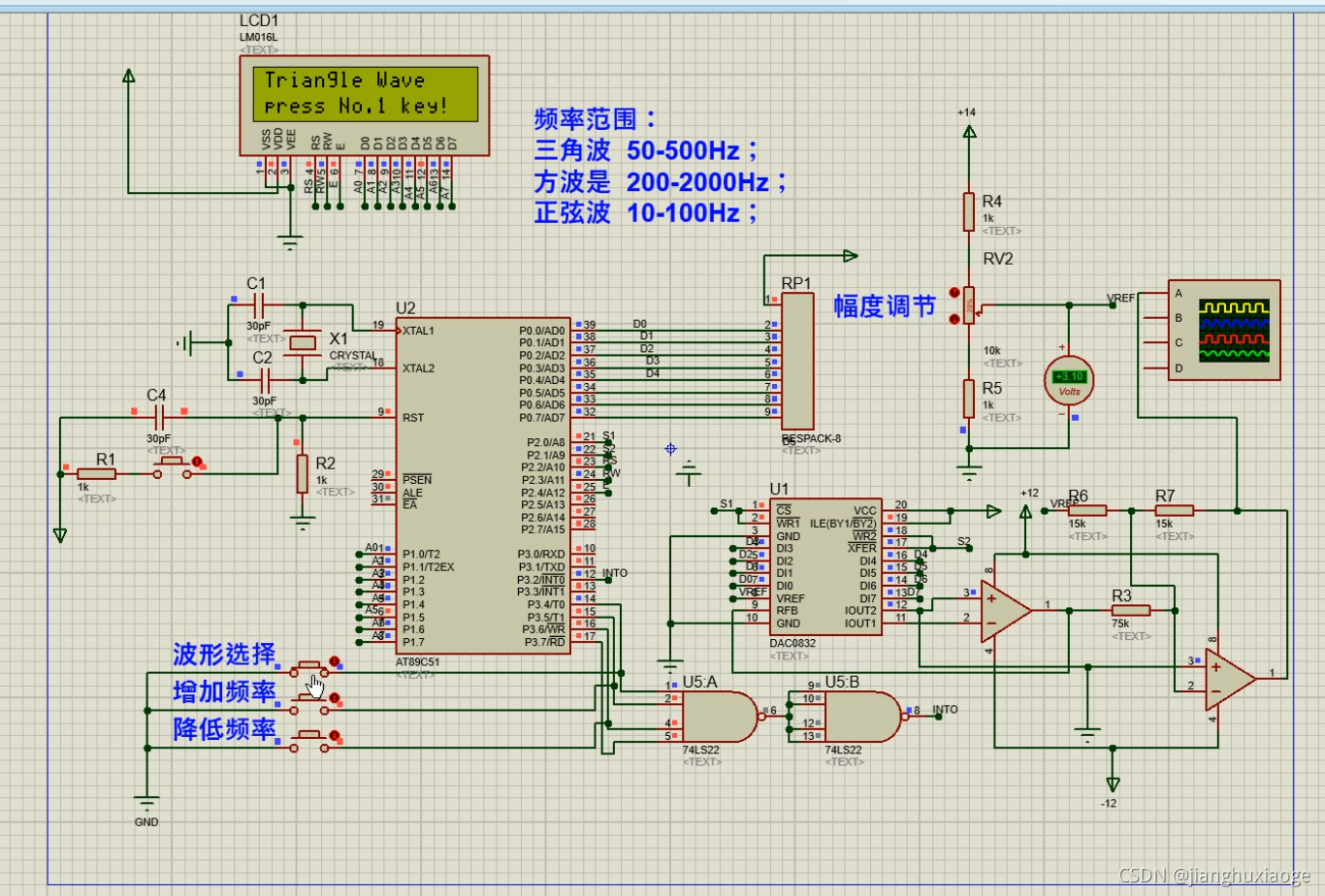
仿真图2简介:
本系统采用C51单片机作为系统的MCU,该系统显示器为LCD1602,可实时显示波形的参数情况
可显示三种波形,分别是正弦波 三角波方波,其中三角波频率范围是50-500HZ,方波的频率范围是20-2000HZ,正弦波范围是10-100HZ
该设计不支持调节波形的占空比
波形输出通过仿真软件的示波器可以查看得到
波形发生器的核心芯片是利用DAC0832产生+运放经过放大之后输出
三个功能按键分别是波形选择、频率增加、频率减少
参考代码如下:
#include <reg51.h>
#include<string.h>
#define uchar unsigned char
#define uint unsigned int
sbit RS=P3^0;
sbit RW=P3^1;
sbit EN=P3^3;
sbit K1=P2^0;
sbit K2=P2^1;
sbit K3=P2^2;
sbit K4=P2^3;
sbit K5=P2^4;
uchar WaveChoice=1;
uchar ys=30;
uchar i,a=0;
uchar sqar_num=128;
uint freq;
uchar code Sin[]={"Sine "};
uchar code Squ[]={"Square "} ;
uchar code Tri[]={"Triangle "};
uchar code Saw[]={"Sawtooth "} ;
uchar code No[]={"No Signal out "};
uchar code Wave[]={"Wave :"};
uchar code Fre[]={"Freq :"};
uchar code tosin[256]=
{0x80,0x83,0x86,0x89,0x8d,0x90,0x93,0x96,0x99,0x9c,0x9f,0xa2,0xa5,0xa8,0xab,
0xae,0xb1,0xb4,0xb7,0xba,0xbc,0xbf,0xc2,0xc5,0xc7,0xca,0xcc,0xcf,0xd1,0xd4,0xd6,0xd8,
0xda,0xdd,0xdf,0xe1,0xe3,0xe5,0xe7,0xe9,0xea,0xec,0xee,0xef,0xf1,0xf2,0xf4,
0xf5,0xf6,0xf7,0xf8,0xf9,0xfa,0xfb,0xfc,0xfd,0xfd,0xfe,0xff,0xff,0xff,0xff,0xff,0xff,
0xff,0xff,0xff,0xff,0xff,0xff,0xfe,0xfd,0xfd,0xfc,0xfb,0xfa,0xf9,0xf8,0xf7,0xf6,0xf5,
0xf4,0xf2,0xf1,0xef,0xee,0xec,0xea,0xe9,0xe7,0xe5,0xe3,0xe1,0xde,0xdd,0xda,0xd8,
0xd6,0xd4,0xd1,0xcf,0xcc,0xca,0xc7,0xc5,0xc2,0xbf,0xbc,0xba,0xb7,0xb4,0xb1,0xae,0xab,
0xa8,0xa5,0xa2,0x9f,0x9c,0x99,0x96,0x93,0x90,0x8d,0x89,0x86,0x83,0x80,
0x80,0x7c,0x79,0x76,0x72,0x6f,0x6c,0x69,0x66,0x63,0x60,0x5d,0x5a,0x57,0x55,
0x51,0x4e,0x4c,0x48,0x45,0x43,0x40,0x3d,0x3a,0x38,0x35,0x33,0x30,0x2e,0x2b,
0x29,0x27,0x25,0x22,0x20,0x1e,0x1c,0x1a,0x18,0x16,0x15,0x13,0x11,0x10,0x0e,
0x0d,0x0b,0x0a,0x09,0x08,0x07,0x06,0x05,0x04,0x03,0x02,0x02,0x01,0x00,0x00,
0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x00,0x01,0x02 ,0x02,0x03,0x04,
0x05,0x06,0x07,0x08,0x09,0x0a,0x0b,0x0d,0x0e,0x10,0x11,0x13,0x15,0x16,0x18,
0x1a,0x1c,0x1e,0x20,0x22,0x25,0x27,0x29,0x2b,0x2e,0x30,0x33,0x35,0x38,0x3a,
0x3d,0x40,0x43,0x45,0x48,0x4c,0x4e ,0x51,0x55,0x57,0x5a,0x5d,0x60,0x63,0x66 ,
0x69,0x6c,0x6f,0x72,0x76,0x79,0x7c,0x80 };
void DelayMS(uchar ms)
{
uchar i;
while(ms--) for(i=0;i<120;i++);
}
void Delay1(uint y)
{
uint i;
for(i=y;i>0;i--);
}
uchar Busy_Check()
{
uchar LCD_Status;
RS=0; // 寄存器选择
RW=1; //读状态寄存器
EN=1; // 开始读
DelayMS(1);
LCD_Status=P1;
EN=0;
return LCD_Status;
}
void Write_LCD_Command(uchar cmd)
{
while((Busy_Check()&0x80)==0x80); //忙等待
RS=0; //选择命令寄存器
RW=0; //写
EN=0;
P1=cmd;EN=1;DelayMS(1);EN=0;
}
void Write_LCD_Data(uchar dat)
{
while((Busy_Check()&0x80)==0x80); //忙等待
RS=1; RW=0; EN=0; P1=dat;EN=1;DelayMS(1);EN=0;
}
void Init_LCD()
{
Write_LCD_Command(0x38);
DelayMS(1);
Write_LCD_Command(0x01); //清屏
DelayMS(1);
Write_LCD_Command(0x06); //字符进入模式:屏幕不动,字符后移
DelayMS(1);
Write_LCD_Command(0x0C); //显示开、关光标
DelayMS(1);
}
void Write_freq(uint k)
{
uchar qian,bai,shi,ge;
qian=k/1000;
bai=k/100%10;
shi=k/10%10;
ge=k%10;
Write_LCD_Command(0x86+0x40);
Write_LCD_Data(0x30+qian);
Write_LCD_Data(0x30+bai);
Write_LCD_Data(0x30+shi);
Write_LCD_Data(0x30+ge);
Write_LCD_Data(0x48);
Write_LCD_Data(0x5a);
}
void Xianshi_f()
{
if(WaveChoice==1)
{
freq=(10000000/(50000+2860*ys));
Write_freq(freq);
}
if(WaveChoice==2)
{
freq=(10000000/(50000+2300*ys));
Write_freq(freq);
}
if(WaveChoice==3)
{
freq=(10000000/(14000+2300*ys));
Write_freq(freq);
}
if(WaveChoice==4)
{
freq=(10000000/(15000+2300*ys));
Write_freq(freq);
}
}
void Write_wave(uchar t )
{
switch(t)
{
case 0:
Write_LCD_Command(0x86);
DelayMS(5);
for (i=0;i<sizeof(No)-1;i++)
{
Write_LCD_Data(No[i]);
DelayMS(5);
}
break;
case 1:
ys=25;
Write_LCD_Command(0x86);
DelayMS(5);
for (i=0;i<sizeof(Sin)-1;i++)
{
Write_LCD_Data(Sin[i]);
DelayMS(5);
}
break;
case 2:
ys=30;
Write_LCD_Command(0x86);
DelayMS(5);
for (i=0;i<sizeof(Squ)-1;i++)
{
Write_LCD_Data(Squ[i]);
DelayMS(5);
}
break;
case 3:
ys=30;
Write_LCD_Command(0x86);
DelayMS(5);
for (i=0;i<sizeof(Tri)-1;i++)
{
Write_LCD_Data(Tri[i]);
DelayMS(5);
}
break;
case 4:
ys=30;
Write_LCD_Command(0x86);//液晶显示位置
DelayMS(5);
for (i=0;i<sizeof(Saw)-1;i++)
{
Write_LCD_Data(Saw[i]);
DelayMS(5);
}
break;
}
}
资料地址:http://www.jh-tec.cn/archives/8351