文章目录
- 2. 简单应力状态下的应力应变关系
- 2.1 简单拉伸的应力应变关系
- 2.2 真实应力应变关系
- 2.3 应力-应变关系简化模型
2. 简单应力状态下的应力应变关系
我们在高中就学过,弹簧拉伸力和变形量成比例,对于一般的金属材料,在一定载荷以内这种结论也是成立的,这种情况称之为弹性。在下面的材料力学单向拉伸试验的结果中,我们可以看到材料先发生弹性变形,超过一定极限后产生塑性变形。
2.1 简单拉伸的应力应变关系
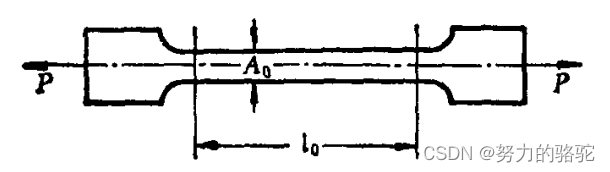
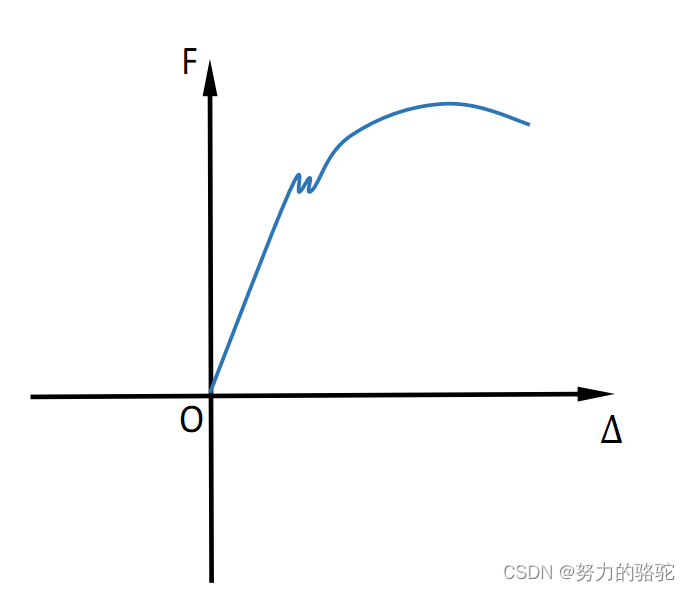
材料拉伸试样如下图1所示,在试验时在试样两端夹持,施加载荷,试验在载荷作用下会伸长,记录相应时刻的载荷-位移数据,并以此绘制曲线如下图2所示。
图
1
拉伸试样
图1 \quad拉伸试样
图1拉伸试样
图
2
载荷
−
变形曲线
图2 \quad载荷-变形曲线
图2载荷−变形曲线
但一般会进行以下变换
σ
=
F
A
0
,
ε
=
Δ
l
0
(1)
\sigma=\frac{F}{A_0}, \varepsilon=\frac{\Delta}{l_0}\tag{1}
σ=A0F,ε=l0Δ(1)
那么可以将载荷-变形曲线变换成
σ
−
ε
\sigma-\varepsilon
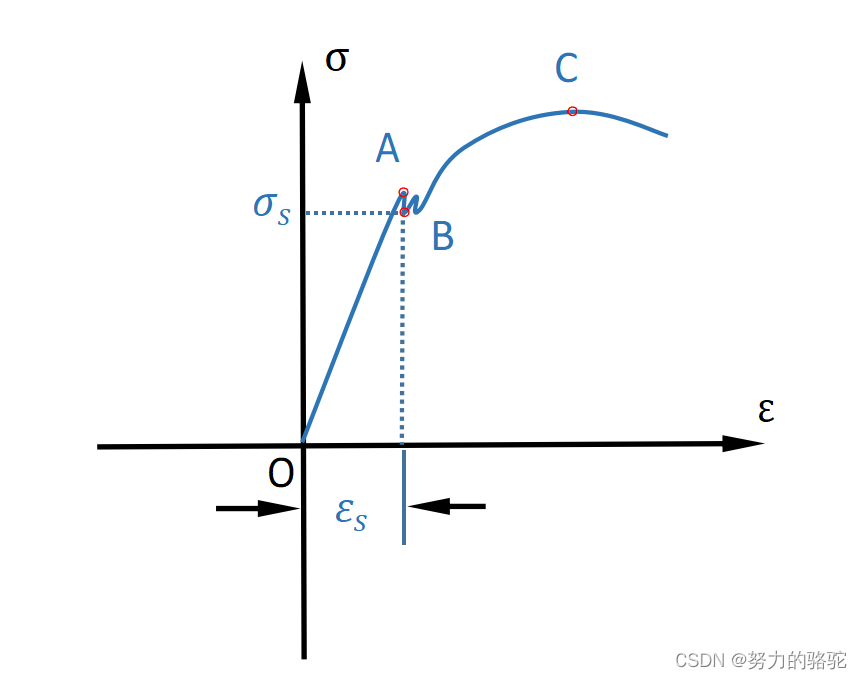
σ−ε应力应变曲线,如下图3。
图
3
σ
−
ε
曲线
图3\quad \sigma-\varepsilon曲线
图3σ−ε曲线
其中A点称为上屈服点,B为下屈服点,材料在两者之间呈现流动状态,应力不发生显著变化只增加应变,一般上屈服点和下屈服点区别不大(此屈服流动的现象一般在低碳钢中存在,合金钢等往往没有明显的特征),用
σ
s
\sigma_s
σs来代替,称材料的屈服强度。材料在
σ
s
\sigma_s
σs以下呈现弹性变形,也就是载荷去除之后变形能够完全恢复,且应力和应变成比例。同时,金属材料压缩的应力应变曲线基本上与拉伸的应力应变曲线接近。
有一些金属可能没有上下屈服流动阶段,如下图4。
在应力超过弹性极限后,会产生塑性应变 ε p \varepsilon^p εp,缓慢卸去载荷,变形也不能完全恢复(见图4中 ε p \varepsilon^p εp),这种现象成为屈服。同时卸载曲线也是线性的,并且斜率和刚开始的弹性段一样,直到反向屈服。
图4中A’为材料的压缩屈服点,假设A与A’对称(即压缩屈服等于拉伸屈服),左图为多晶材料,多晶材料反向屈服点M’一般绝对值小于A’,称为包晶格效应(Bauschingerx effect),即在拉伸方向的强化导致压缩方向的弱化,这种效应在后文中还会应用(就是随动强化模型)。
右图为单晶材料,材料反向屈服点M’一般绝对值大于A’,即在拉伸方向的强化导致压缩方向的同样的强化,这种效应在后文中还会应用(就是等向强化模型)。

图
4
加载
/
卸载应力应变曲线
图4\quad 加载/卸载应力应变曲线
图4加载/卸载应力应变曲线
2.2 真实应力应变关系
在图3中,在应力达到最高点C以前,应力和应变一同增加,到达C点后应变增加,应力却下降了。事实上,在C点前由于泊松比的存在,变形前试样的截面随着载荷增加,会慢慢减小,但是在随着变形的继续,某一时刻横截面会较迅速的减小,这种现象称为颈缩(也称塑性失稳),由于截面的迅速缩小,试样的承载能力随之下降,相应的名义应力也下降。因此实际上,名义应力在变形量小的时候跟试样的真实应力差别不大,但是在颈缩时,名义应力和真实应力较大差别。
按照定义,定义真实应力
σ
~
\widetilde{\sigma}
σ
如下
σ
~
=
P
A
(2)
\widetilde{\sigma}=\frac{P}{A}\tag{2}
σ
=AP(2)
其中
A
A
A为试样瞬时截面,
P
P
P为试样瞬时载荷。
瞬时的应变增量
d
ε
~
d\widetilde{\varepsilon}
dε
如下所示
d
ε
~
=
d
l
′
l
′
(3)
d\widetilde{\varepsilon}=\frac{dl'}{l'}\tag{3}
dε
=l′dl′(3)
其中
l
′
l'
l′为试样瞬时长度,
d
l
′
dl'
dl′为试样瞬时伸长量。
那么真实应变
ε
~
\widetilde{\varepsilon}
ε
为
ε
~
=
∫
l
0
l
d
l
′
l
′
=
ln
(
l
′
)
∣
l
0
l
=
ln
(
l
l
0
)
=
ln
(
l
−
l
0
+
l
0
l
0
)
=
ln
(
1
+
ε
)
(4)
\widetilde{\varepsilon}=\int_{l_0}^{l}\frac{dl'}{l'}=\ln(l')|_{l_0}^{l}=\ln(\frac{l}{l_0})=\ln(\frac{l-l_0+l_0}{l_0})=\ln(1+\varepsilon)\tag{4}
ε
=∫l0ll′dl′=ln(l′)∣l0l=ln(l0l)=ln(l0l−l0+l0)=ln(1+ε)(4)
在材料进入塑性阶段,材料表现出塑性流动的特征,这里需要引用材料几乎不可压缩的假设,因此有
A 0 l 0 = A l (5) A_0l_0=Al\tag{5} A0l0=Al(5)
那么真实应力变
σ
~
\widetilde{\sigma}
σ
为
σ
~
=
P
A
=
P
A
0
⋅
A
0
A
=
P
A
0
⋅
l
l
0
=
σ
e
ε
~
=
σ
(
1
+
ε
)
(6)
\widetilde{\sigma}=\frac{P}{A}=\frac{P}{A_0}\cdot\frac{A_0}{A}=\frac{P}{A_0}\cdot\frac{l}{l_0}=\sigma e^{\widetilde{\varepsilon}}=\sigma (1+\varepsilon)\tag{6}
σ
=AP=A0P⋅AA0=A0P⋅l0l=σeε
=σ(1+ε)(6)
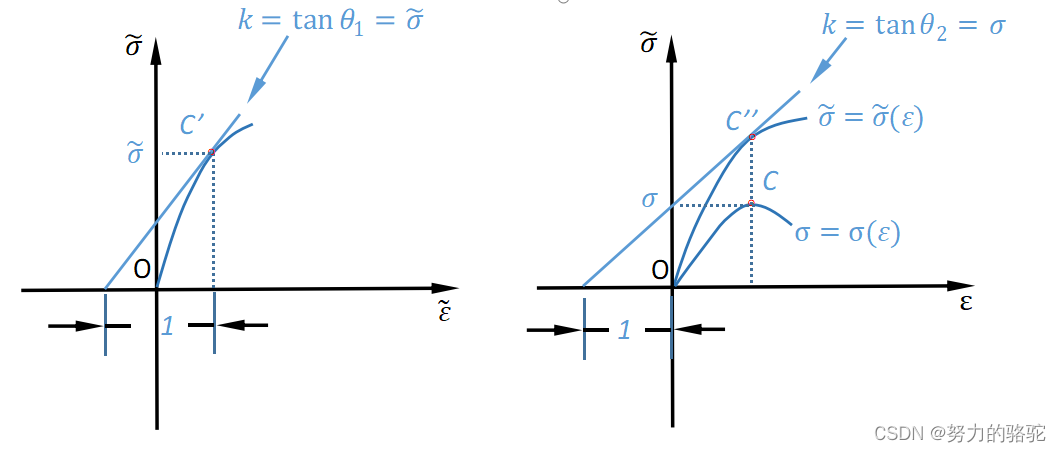
在图5右侧曲线中C为名义应力达到最大值,在此时,有
d
σ
d
ε
=
0
(7)
\frac{d\sigma}{d\varepsilon}=0\tag{7}
dεdσ=0(7)
在图5右侧曲线中C为名义应力达到最大值对应的真实应力点C’’,其中真实应力有式(6),那么有
d
σ
~
d
ε
=
σ
(8)
\frac{d\widetilde{\sigma}}{d\varepsilon}=\sigma\tag{8}
dεdσ
=σ(8)
在图5左侧曲线中C为名义应力达到最大值对应的真实应力点C’,真实应力和真实应变应满足的条件如下
d
σ
~
d
ε
~
=
(
d
σ
d
ε
⋅
d
ε
d
ε
~
)
e
ε
~
+
σ
e
ε
~
=
σ
e
ε
~
=
σ
~
(9)
\frac{d\widetilde{\sigma}}{d\widetilde{\varepsilon}}=(\frac{d\sigma}{d\varepsilon}\cdot\frac{d\varepsilon}{d\widetilde{\varepsilon}})e^{\widetilde{\varepsilon}}+\sigma e^{\widetilde{\varepsilon}}=\sigma e^{\widetilde{\varepsilon}}=\widetilde{\sigma}\tag{9}
dε
dσ
=(dεdσ⋅dε
dε)eε
+σeε
=σeε
=σ
(9)
图
5
应力应变曲线
图5\quad 应力应变曲线
图5应力应变曲线
2.3 应力-应变关系简化模型
在理论分析中,常常采用简化的应力应变模型来分析具体问题(实际工程中也多有应用)。
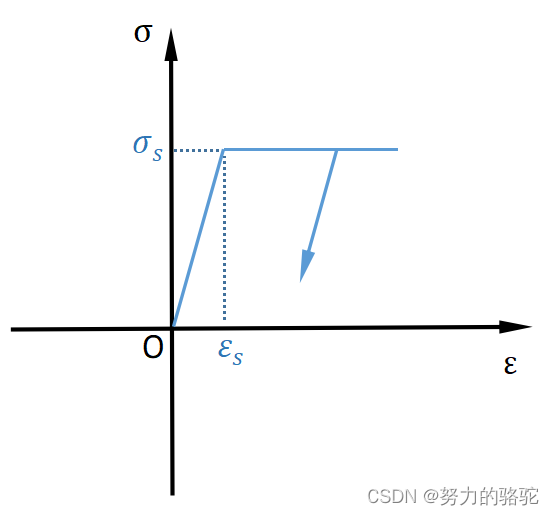
简化模型一:理想弹塑性模型
如下图6所示,那么应力应变关系可以写为
σ
=
{
E
ε
,
ε
≤
ε
s
σ
s
s
i
g
n
ε
,
ε
>
ε
s
(10)
\sigma=\begin{cases}E\varepsilon &\quad,\quad \varepsilon\le\varepsilon_s\\ \sigma_s sign \varepsilon &\quad,\quad \varepsilon\gt\varepsilon_s \end{cases}\tag{10}
σ={Eεσssignε,ε≤εs,ε>εs(10)
图
6
理想弹塑性模型
图6\quad 理想弹塑性模型
图6理想弹塑性模型
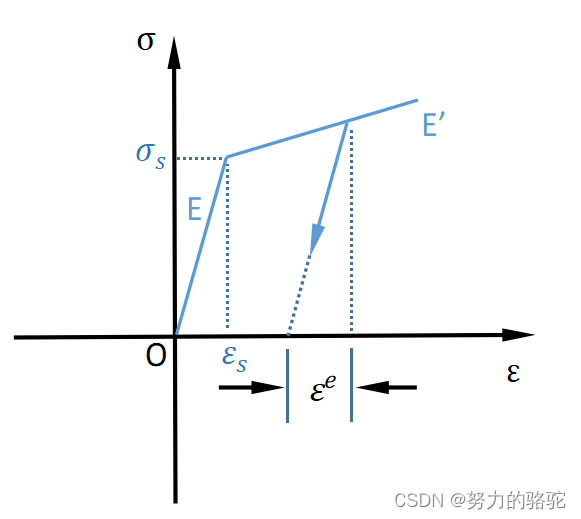
简化模型二:线性强化弹塑性模型
如下图7所示,那么应力应变关系可以写为
σ = { E ε , ε ≤ ε s σ s + E ’ ( ε − ε s ) , ε > ε s (11) \sigma=\begin{cases}E\varepsilon &\quad,\quad \varepsilon\le\varepsilon_s\\ \sigma_s +E’( \varepsilon-\varepsilon_s) &\quad,\quad \varepsilon\gt\varepsilon_s \end{cases}\tag{11} σ={Eεσs+E’(ε−εs),ε≤εs,ε>εs(11)
图
7
线性强化弹塑性模型
图7\quad 线性强化弹塑性模型
图7线性强化弹塑性模型
当然,上式当进入塑性后,还可以写成另外一种形式,如下所示
ε
=
ε
e
+
ε
p
(12)
\varepsilon=\varepsilon^e+\varepsilon^p\tag{12}
ε=εe+εp(12)
σ
=
σ
s
+
h
ε
p
(13)
\sigma=\sigma_s+h\varepsilon^p\tag{13}
σ=σs+hεp(13)
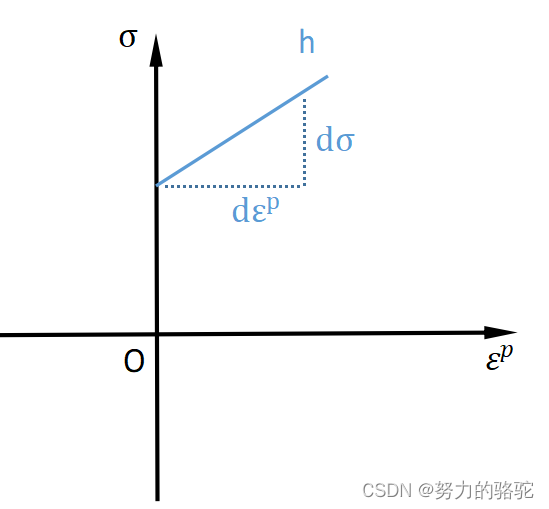
可以通过下图来确定h,下图为应力-塑性应变图,由图7可知
E
′
=
d
σ
d
ε
(14)
E'=\frac{d\sigma}{d\varepsilon}\tag{14}
E′=dεdσ(14)
同时由图8可知
h
=
d
σ
d
ε
p
=
d
σ
d
ε
−
d
ε
e
=
1
d
ε
d
σ
−
d
ε
e
d
σ
=
1
1
E
′
−
1
E
(15)
h=\frac{d\sigma}{d\varepsilon^p}=\frac{d\sigma}{d\varepsilon-d\varepsilon^e}=\frac{1}{\frac{d\varepsilon}{d\sigma}-\frac{d\varepsilon^e}{d\sigma}}=\frac{1}{\frac{1}{E'}-\frac{1}{E}}\tag{15}
h=dεpdσ=dε−dεedσ=dσdε−dσdεe1=E′1−E11(15)
代入(13),那么有
ε
p
=
σ
−
σ
s
h
=
(
σ
−
σ
s
)
(
1
E
′
−
1
E
)
\varepsilon^p=\frac{\sigma-\sigma_s}{h}=(\sigma-\sigma_s)(\frac{1}{E'}-\frac{1}{E})
εp=hσ−σs=(σ−σs)(E′1−E1)
那么相应的式(11)可以改写为
ε
=
ε
e
+
ε
p
=
σ
E
+
(
σ
−
σ
s
)
(
1
E
′
−
1
E
)
(16)
\varepsilon=\varepsilon^e+\varepsilon^p=\frac{\sigma}{E} +( \sigma-\sigma_s)(\frac{1}{E'}-\frac{1}{E})\tag{16}
ε=εe+εp=Eσ+(σ−σs)(E′1−E1)(16)
同时,有
0
<
1
h
=
1
E
′
−
1
E
<
1
E
′
(17)
0\lt\frac{1}{h}=\frac{1}{E'}-\frac{1}{E}\lt\frac{1}{E'}\tag{17}
0<h1=E′1−E1<E′1(17)
那么有以下结论,
h
>
E
′
(18)
h\gt E'\tag{18}
h>E′(18)
而其物理意义如下图
图
8
h
的物理意义(在
σ
−
ε
p
图中)
图8\quad h的物理意义(在\sigma-\varepsilon^p 图中)
图8h的物理意义(在σ−εp图中)