Mat
构造函数
cv::Mat img ; //默认 定义了一个Mat
img = cv::imread("image.jpg");//除了直接读取,还有通过大小构造等
cv::Mat img = cv::imread("image.png", IMREAD_GRAYSCALE);
cv::Mat img_novel = img;
转换 Mat::convertTo(Mat& m, int rtype, double alpha=1, double beta=0)
- OpenCV中Mat数据类型及相互转换 CV_8U转为CV_16U
转到数组
// https://www.cnblogs.com/xiaoxiaoyibu/p/9491858.html#
//动态创建二维数组,row行col列
int **La = new int *[row];
for (int i = 0; i < row; i ++){
La[i] = new int[col];
}
// 循环二维数组和mat,并将mat对应值赋给二维数组对应值,
for (int i = 0; i < row; i ++){
for (int j = 0; j < col; j ++){
La[i][j] = mat.at<uchar>(i, j);
}
}
// 释放分配空间 (直接创建在栈上double La[row][col];就不用delete了)
for (int i = 0; i < row; i ++){
delete []La[i];
}
delete [] La;
- cv::Mat的许多操作文档
转到std::vector(注:这个例子将二维图像.reshape(0, 1))
//https://book.mynavi.jp/support/pc/opencv2/c3/opencv_mat.html#cv-vec
#include <iostream>
#include <opencv2/core/core.hpp>
#define OPENCV_VERSION(a,b,c) (((a) << 16) + ((b) << 8) + (c))
#define OPENCV_VERSION_CODE OPENCV_VERSION(CV_MAJOR_VERSION, CV_MINOR_VERSION, CV_SUBMINOR_VERSION)
int
main(int argc, char *argv[])
{
cv::Mat m1 = (cv::Mat_<double>(3,3) << 1, 2, 0, 3, 1, 4, 1, 2, 1);
std::vector<double> v1;
// Mat -> vector
m1 = m1.reshape(0, 1); // 1行の行列に変形
#if OPENCV_VERSION_CODE<OPENCV_VERSION(2,3,0)
m1.copyTo<double>(v1); // データをコピー
#else
m1.copyTo(v1); // データをコピー
#endif
std::cout << "m1=" << m1 << std::endl << std::endl;
for(std::vector<double>::iterator it=v1.begin(); it!=v1.end(); ++it)
std::cout << *it << ", ";
std::cout << std::endl;
// vector -> Mat
cv::Mat m2(v1); // データを共有
cv::Mat m3(v1, true); // データをコピー
}
- 还可以去参考一下这个文章
std::vector<uchar> array;
if (mat.isContinuous()) {
// array.assign(mat.datastart, mat.dataend); // <- has problems for sub-matrix like mat = big_mat.row(i)
array.assign(mat.data, mat.data + mat.total()*mat.channels());
} else {
for (int i = 0; i < mat.rows; ++i) {
array.insert(array.end(), mat.ptr<uchar>(i), mat.ptr<uchar>(i)+mat.cols*mat.channels());
}
}
操作
- 操作的官方手册
比如:
cv::Mat中最值和均值的求解

保存mat为图片
vector<int> compression_params;//可选参数
compression_params.push_back(IMWRITE_PNG_COMPRESSION); //PNG格式图像压缩标志
compression_params.push_back(9); //设置最高压缩质量
bool result = imwrite("alpha.png", _frame2, compression_params);
制作掩膜图像
#include <iostream>
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <opencv2/imgproc.hpp>
#include <opencv2/videoio.hpp>
#include <opencv2/video.hpp>
#include <opencv2/highgui/highgui_c.h>//https://blog.csdn.net/weixin_44312186/article/details/89000922
using namespace cv;
using namespace std;
void colorReduce(Mat& image, int div)// 这里使用了Mat_instance.at<typename>(i,j) https://www.cnblogs.com/ybqjymy/p/15935894.html
{
for (int i = 0; i<image.rows; i++)
{
for (int j = 0; j<image.cols; j++)
{
if (image.at<Vec3b>(i, j)[0] - 0 != 0) {
image.at<Vec3b>(i, j)[0] = 255;
image.at<Vec3b>(i, j)[1] = 255;
image.at<Vec3b>(i, j)[2] = 255;
}
//cout<< image.at<Vec3b>(i, j)[0]-0 << endl;//灰度图像元素类型为<uchar>, 彩色图像元素类型为<cv::Vec3b>
}
}
bool result = imwrite("hahaah.png", image);
}
int main(int argc, char** argv) {
Mat src = imread("C:/Users/admin/Desktop/mask.jpg");
colorReduce(src, 3);
waitKey(0);
destroyAllWindows();
return 0;
}
Mat矩阵相乘相关
一个掩膜的例子:
Mat A = imread("C:/Users/admin/Pictures/mask.jpg");
Mat B = imread("C:/Users/admin/Pictures/fm.png");
Mat C = A.mul(B);
imshow("输入窗口", C);
C++ Opencv split()通道分离函数 merge()通道合并函数 使用操作详解
split(const Mat &src,//输入图像 Mat* mbegin//输出图像的数组)
C++ opencv之图像直方图(calcHist)
绘制
- 点
cv::Point CvPoint:表示一个坐标为整数的二维点,是一个包含integer类型成员x和y的简单结构体。
cv::scalar 表示四个元素地向量 Scalar(a,b,c) ;//a =blue,b=green,c=red表示RGB的三个通道
- 简单几何
cv::line 线
cv::rectangle 矩形
cv::circle ⚪
CUDA编译
需要有GPU硬件
需要的源代码 opencv 编译好的build和source(用source部分) + opencv扩展模块的代码
- opencv扩展模块
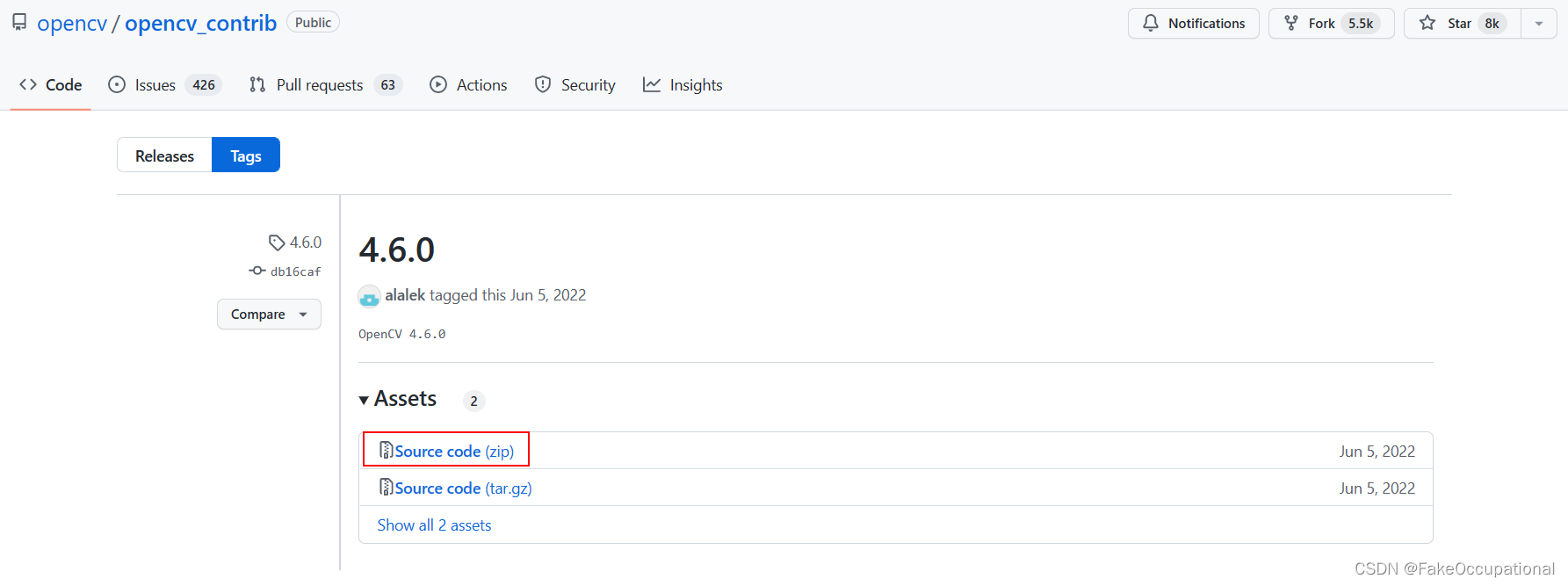
用Cmake编译一下源码,当然官方有编译的教程(并且还有参数细节):
-
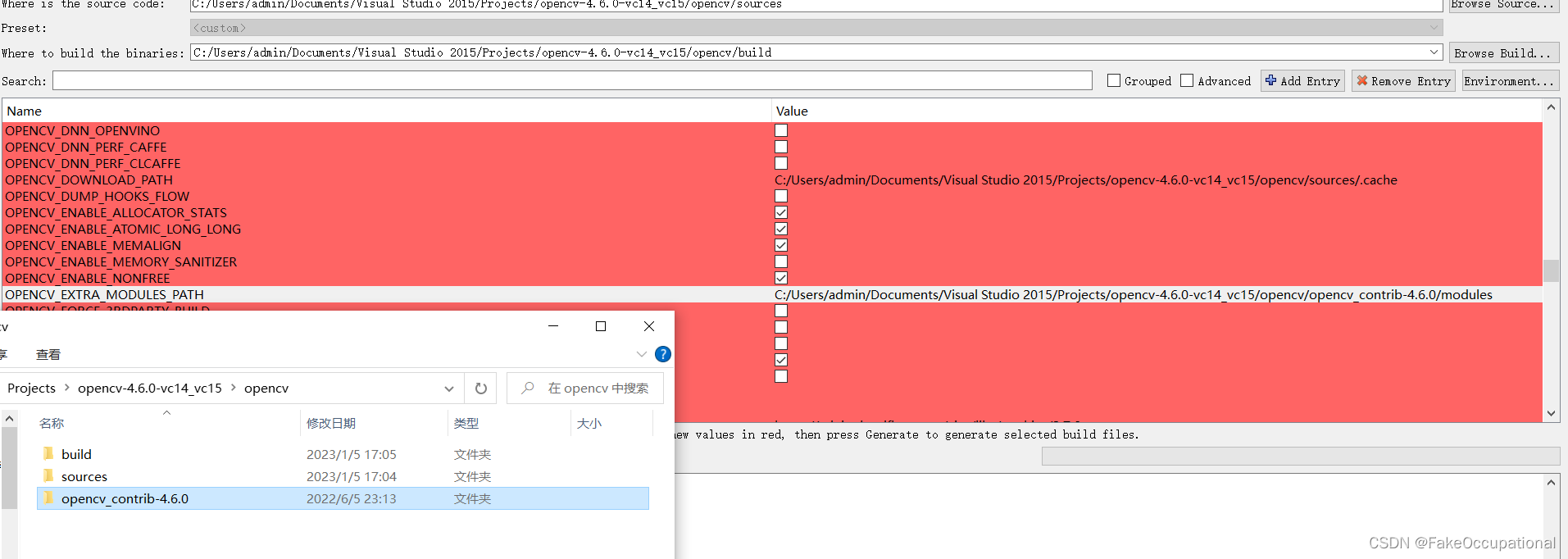
注:直接选中额外模块的源代码是无法编译的
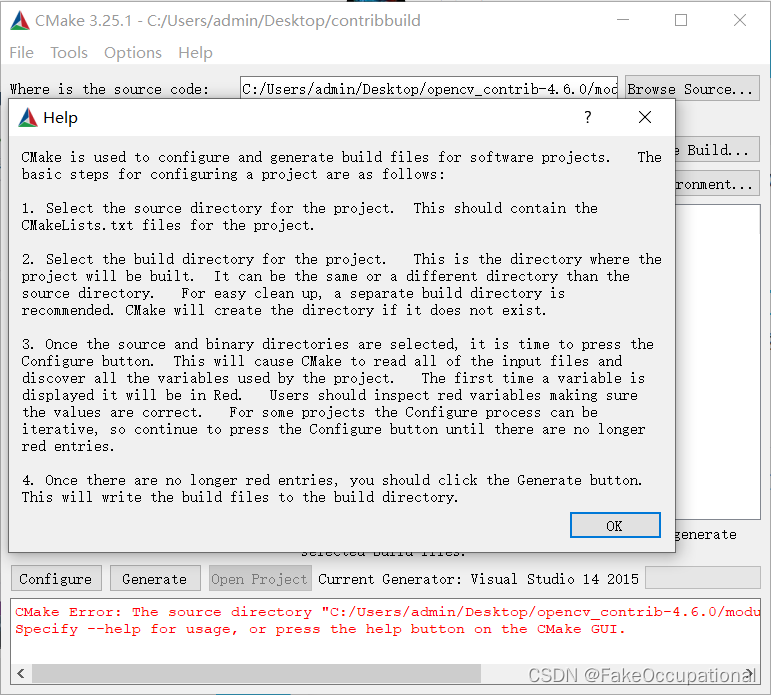
-
这个教程挺详细的,
-
这个版本是在04:38 时有额外路径的选项,和这个文字教程一样,stackoverflow的英文教程
-
还有直接建议复制源码过去的Pasted the modules I want from opencv_contrib into opencv/modules.
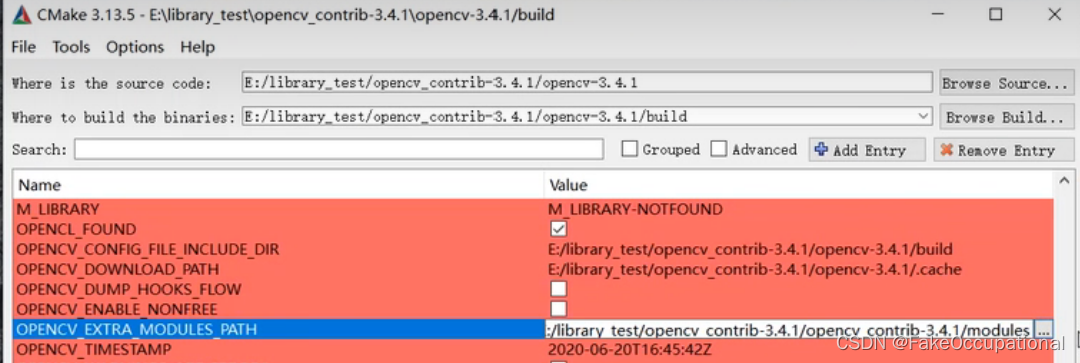
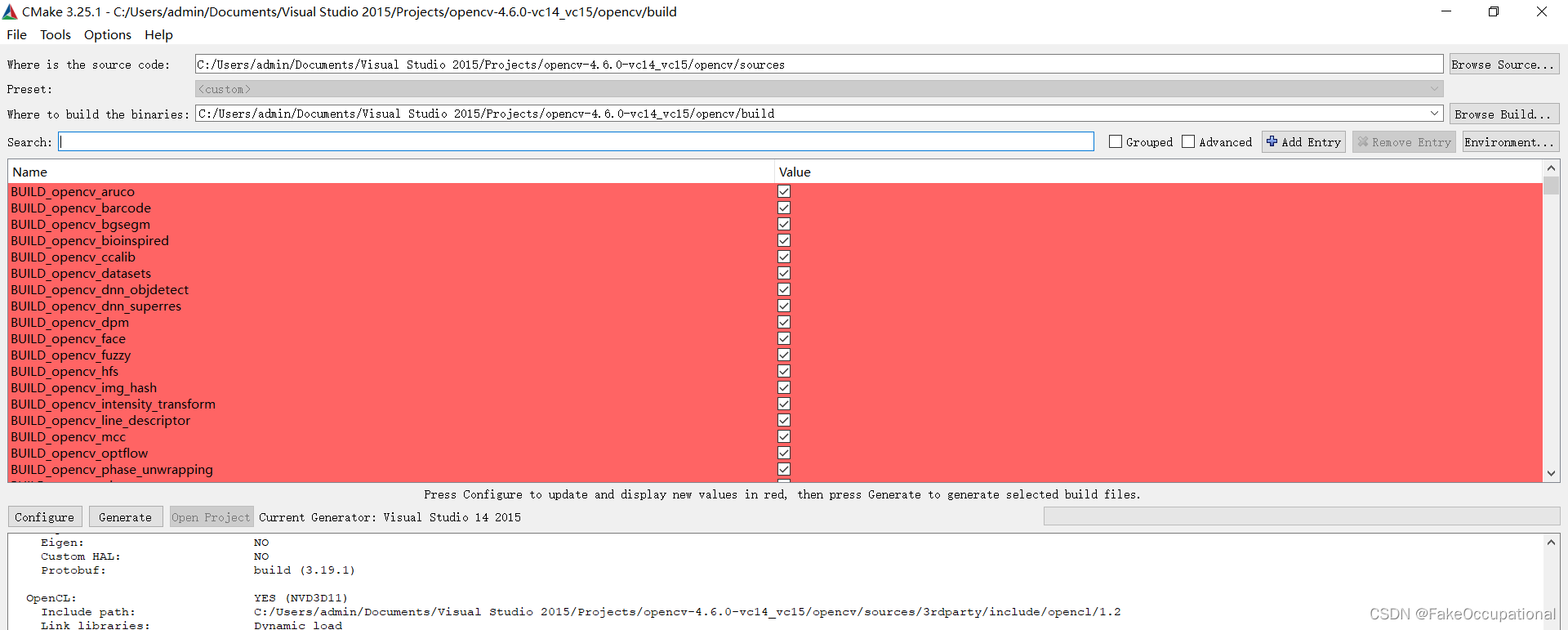
- 在cmake-gui,先选择源码与目标路径

- config选项

- 设置:OPENCV_EXTRA_MODULES_PATH
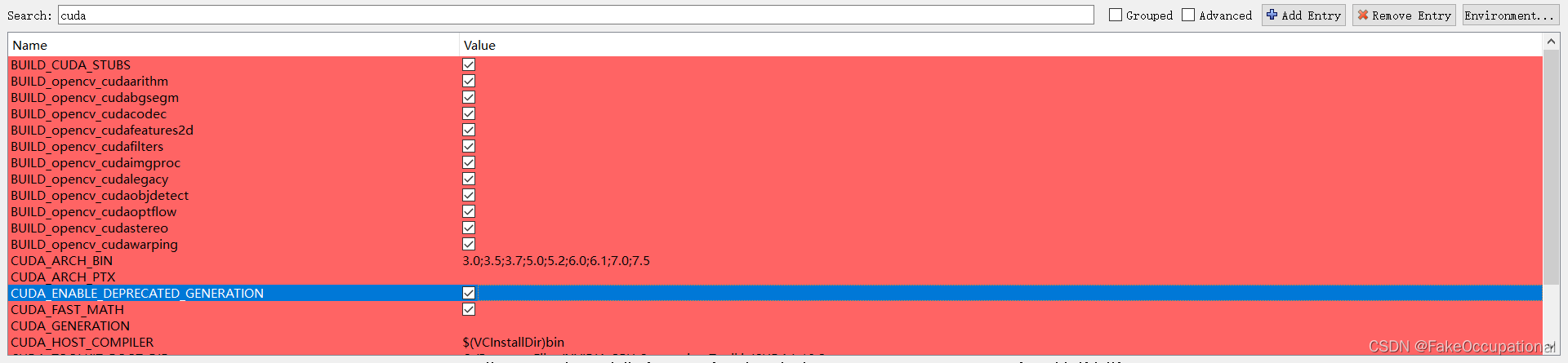
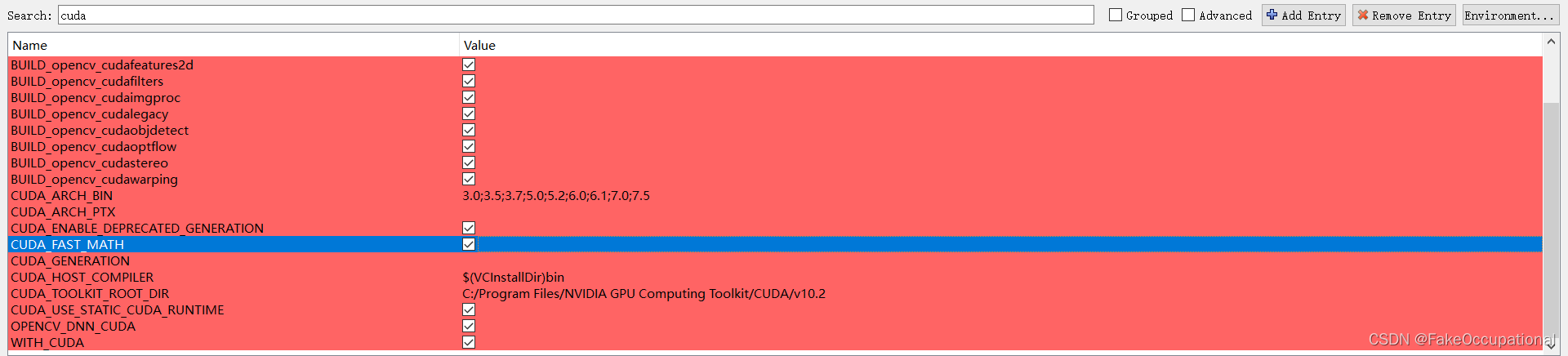
- 勾选与cuda有关的
- 再次点击config

- 好多这个错误
=======================================================================
Couldn't download files from the Internet.
Please check the Internet access on this host.
=======================================================================
CMake Warning at cmake/OpenCVDownload.cmake:248 (message):
IPPICV: Download failed: 6;"Couldn't resolve host name"
For details please refer to the download log file:
C:/Users/admin/Documents/Visual Studio
2015/Projects/opencv-4.6.0-vc14_vc15/opencv/build/CMakeDownloadLog.txt
Call Stack (most recent call first):
3rdparty/ippicv/ippicv.cmake:37 (ocv_download)
cmake/OpenCVFindIPP.cmake:259 (download_ippicv)
cmake/OpenCVFindLibsPerf.cmake:12 (include)
CMakeLists.txt:733 (include)
-
解决 IPPICV: Downloading ippicv_2020_win_intel64_20191018_general.zip from https://raw.githubusercontent.com/opencv/opencv_3rdparty/a56b6ac6f030c312b2dce17430eef13aed9af274/ippicv/ippicv_2020_win_intel64_20191018_general.zip
-
新增的是关于contribute模块的
-
-
继续config
-
-
最后generate
-

-
有错误手动下载

-
双击 C:\Users\admin\Documents\Visual Studio 2015\Projects\opencv-4.6.0-vc14_vc15\opencv\build\OpenCV.sln
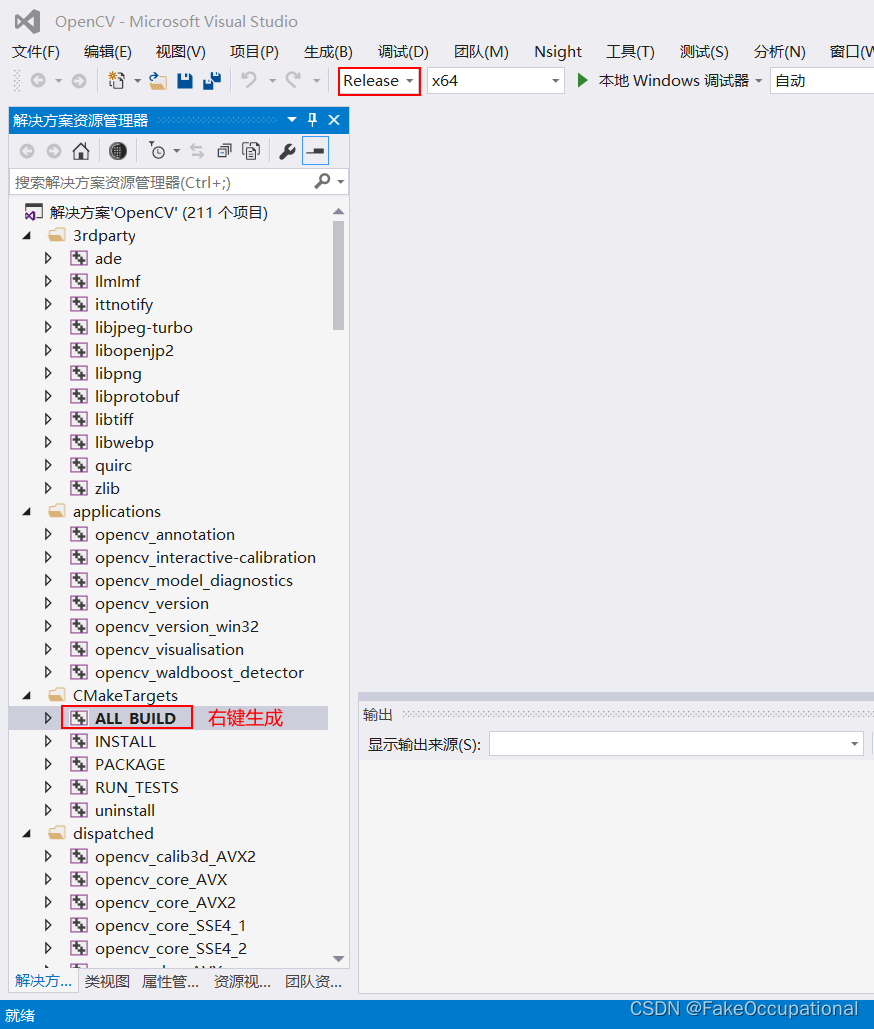

- 然后下边的INSTALL生成
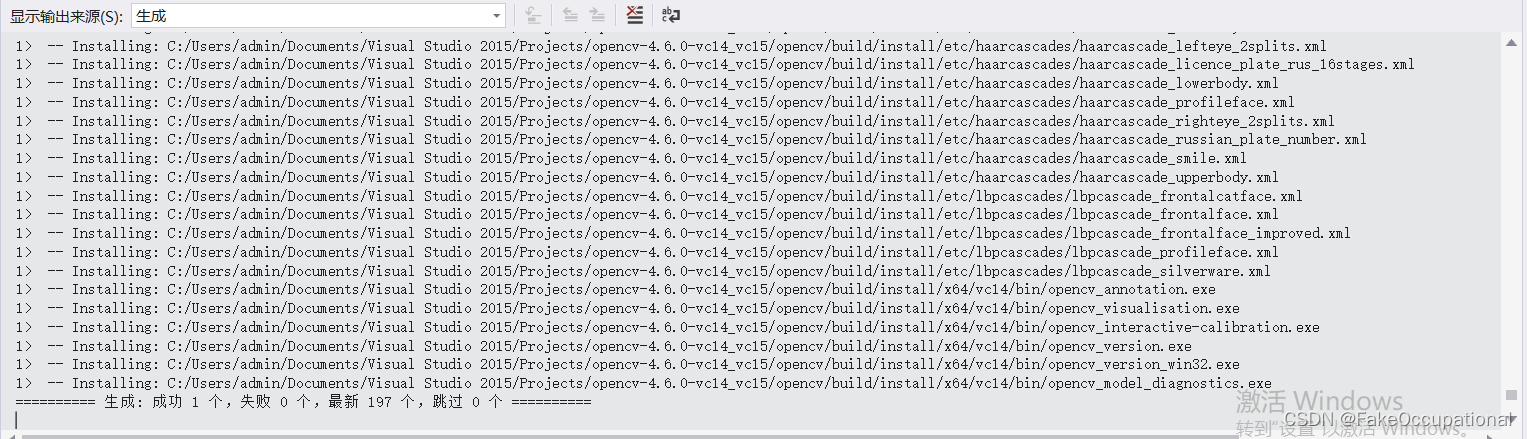
- C:\Users\admin\Documents\Visual Studio 2015\Projects\opencv-4.6.0-vc14_vc15\opencv\build\install
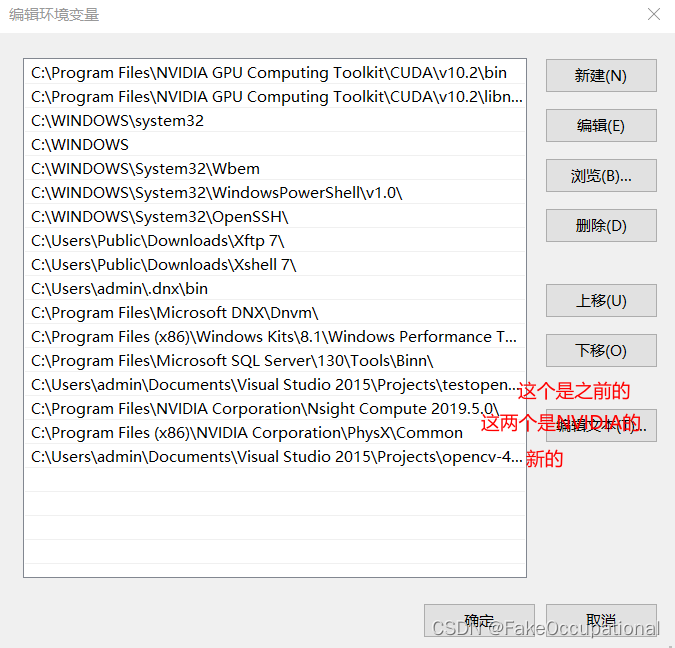
- 就可以将以下bin加到环境变量中了
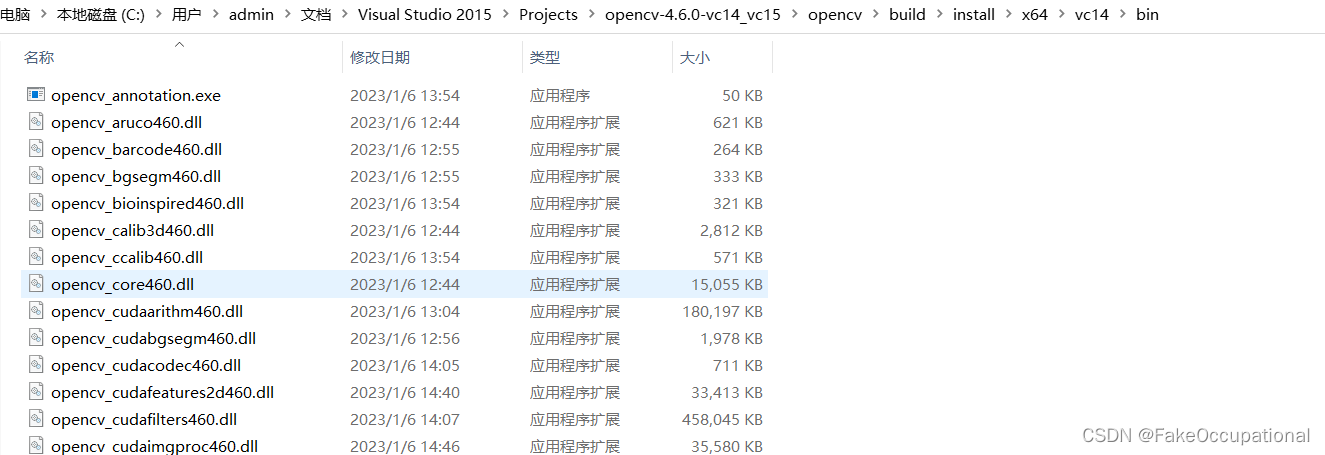
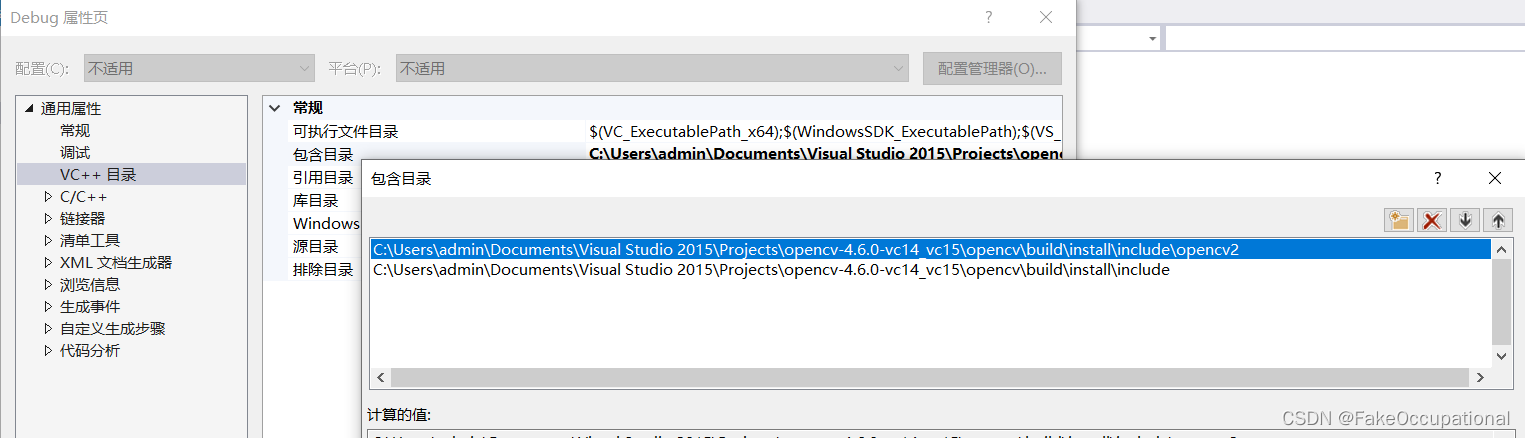
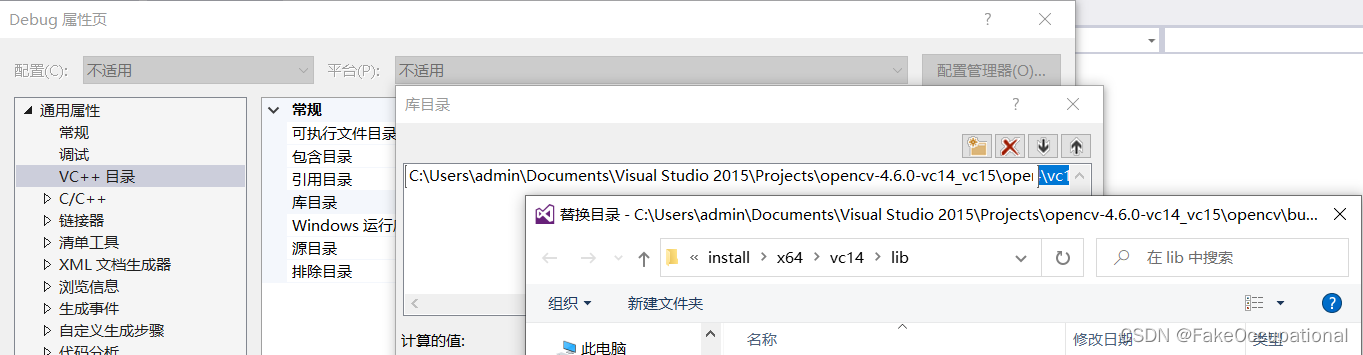

- 将C:\Users\admin\Documents\Visual Studio 2015\Projects\opencv-4.6.0-vc14_vc15\opencv\build\install\x64\vc14\bin加到path
添加链接描述
简单使用
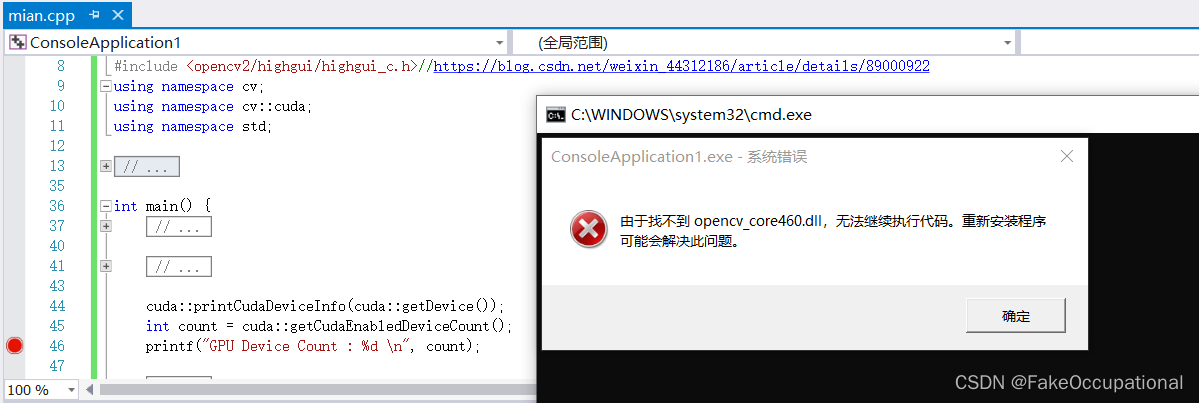
- cuda的简单使用
- 设置完重启就不会有这个错误了
GpuMat cv::gpu::GpuMat(在Python是cv2.cuda_GpuMat)
- 主要看的这个,略微修改与注释
- 官方文档
upload+download()
#include <opencv2/highgui.hpp>
#include <opencv2/cudaimgproc.hpp>
cv::Mat img = cv::imread("image.png", IMREAD_GRAYSCALE);
cv::cuda::GpuMat dst, src;
src.upload(img);
cv::Ptr<cv::cuda::CLAHE> ptr_clahe = cv::cuda::createCLAHE(5.0, cv::Size(8, 8));
ptr_clahe->apply(src, dst);
cv::Mat result;
dst.download(result);
cv::imshow("result", result);
cv::waitKey();
# python 实现
img = cv2.imread("image.png", cv2.IMREAD_GRAYSCALE)
src = cv2.cuda_GpuMat()
src.upload(img)
clahe = cv2.cuda.createCLAHE(clipLimit=5.0, tileGridSize=(8, 8))# 使用对比度受限自适应直方图均衡化来均衡灰度图像的直方图。 https://docs.opencv.org/3.4/db/d79/classcv_1_1cuda_1_1CLAHE.html
dst = clahe.apply(src, cv2.cuda_Stream.Null())# 使用对比度受限自适应直方图均衡化来均衡灰度图像的直方图 https://docs.opencv.org/4.x/d6/db6/classcv_1_1CLAHE.html
result = dst.download()
cv2.imshow("result", result)
cv2.waitKey(0)
使用多GPU 略
打开视频流(这没有用到cuda)
// init video capture with video
VideoCapture capture(videoFileName);
if (!capture.isOpened())
{
// error in opening the video file
cout << "Unable to open file!" << endl;
return;
}
// get default video FPS
double fps = capture.get(CAP_PROP_FPS);
// get total number of video frames
int num_frames = int(capture.get(CAP_PROP_FRAME_COUNT));
- python实现
# init video capture with video
cap = cv2.VideoCapture(video)
# get default video FPS
fps = cap.get(cv2.CAP_PROP_FPS)
# get total number of video frames
num_frames = cap.get(cv2.CAP_PROP_FRAME_COUNT)
读取视频(这里我跳过了源文章地大段基本c++方法地解释)
- 请注意,我们使用相同的 CPU 函数来读取和调整大小,但将结果上传到cv::cuda::GpuMat (cuda_GpuMat)实例:
// resize frame
cv::resize(frame, frame, Size(960, 540), 0, 0, INTER_LINEAR);
// convert to gray
cv::cvtColor(frame, previous_frame, COLOR_BGR2GRAY);
// upload pre-processed frame to GPU
cv::cuda::GpuMat gpu_previous;
gpu_previous.upload(previous_frame);
// declare cpu outputs for optical flow
cv::Mat hsv[3], angle, bgr;
// cv::cuda::GpuMat声明 declare gpu outputs for optical flow
cv::cuda::GpuMat gpu_magnitude, gpu_normalized_magnitude, gpu_angle;
cv::cuda::GpuMat gpu_hsv[3], gpu_merged_hsv, gpu_hsv_8u, gpu_bgr;
// set saturation to 1
hsv[1] = cv::Mat::ones(frame.size(), CV_32F);
gpu_hsv[1].upload(hsv[1]);
- python实现
# proceed if frame reading was successful
if ret:
# resize frame
frame = cv2.resize(previous_frame, (960, 540))
# upload resized frame to GPU --- 多了这一段
gpu_frame = cv2.cuda_GpuMat()
gpu_frame.upload(frame)
# convert to gray ---- 没变
previous_frame = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
# upload pre-processed frame to GPU
gpu_previous = cv2.cuda_GpuMat()
gpu_previous.upload(previous_frame)
# create gpu_hsv output for optical flow ----- hsv = np.zeros_like(frame, np.float32)
gpu_hsv = cv2.cuda_GpuMat(gpu_frame.size(), cv2.CV_32FC3)
gpu_hsv_8u = cv2.cuda_GpuMat(gpu_frame.size(), cv2.CV_8UC3)
gpu_h = cv2.cuda_GpuMat(gpu_frame.size(), cv2.CV_32FC1)
gpu_s = cv2.cuda_GpuMat(gpu_frame.size(), cv2.CV_32FC1)
gpu_v = cv2.cuda_GpuMat(gpu_frame.size(), cv2.CV_32FC1)
# set saturation to 1 ---- hsv[..., 1] = 1.0
gpu_s.upload(np.ones_like(previous_frame, np.float32))
读取视频帧
while (true)//我删除了计时部分
{
// capture frame-by-frame
capture >> frame;if (frame.empty())break;
// 增加了上传
cv::cuda::GpuMat gpu_frame; gpu_frame.upload(frame);
// resize frame
cv::cuda::resize(gpu_frame, gpu_frame, Size(960, 540), 0, 0, INTER_LINEAR);//类似 cv::resize(frame, frame, Size(960, 540), 0, 0, INTER_LINEAR);
// 这里也类似cv::Mat换成 cv::cuda::GpuMat,cv::cvtColor换成cv::cuda::cvtColor
cv::cuda::GpuMat gpu_current;
cv::cuda::cvtColor(gpu_frame, gpu_current, COLOR_BGR2GRAY);
计算密集光流
// calculate optical flow
cv::Mat flow;
calcOpticalFlowFarneback(previous_frame, current_frame, flow, 0.5, 5, 15, 3, 5, 1.2, 0);
// create optical flow instance
Ptr<cuda::FarnebackOpticalFlow> ptr_calc = cuda::FarnebackOpticalFlow::create(5, 0.5, false, 15, 3, 5, 1.2, 0);
// calculate optical flow
cv::cuda::GpuMat gpu_flow;
ptr_calc->calc(gpu_previous, gpu_current, gpu_flow);
可视化前处理
// start post-process timer
auto start_post_time = high_resolution_clock::now();
// split the output flow into 2 vectors
cv::Mat flow_xy[2], flow_x, flow_y;
split(flow, flow_xy);
// get the result
flow_x = flow_xy[0];
flow_y = flow_xy[1];
// convert from cartesian to polar coordinates
cv::cartToPolar(flow_x, flow_y, magnitude, angle, true);
// normalize magnitude from 0 to 1
cv::normalize(magnitude, normalized_magnitude, 0.0, 1.0, NORM_MINMAX);
// get angle of optical flow
angle *= ((1 / 360.0) * (180 / 255.0));
// build hsv image
hsv[0] = angle;
hsv[2] = normalized_magnitude;
merge(hsv, 3, merged_hsv);
// multiply each pixel value to 255
merged_hsv.convertTo(hsv_8u, CV_8U, 255);
// convert hsv to bgr
cv::cvtColor(hsv_8u, bgr, COLOR_HSV2BGR);
// update previous_frame value
previous_frame = current_frame;
// start post-process timer
auto start_post_time = high_resolution_clock::now();
// split the output flow into 2 vectors
cv::cuda::GpuMat gpu_flow_xy[2];
cv::cuda::split(gpu_flow, gpu_flow_xy);
// convert from cartesian to polar coordinates
cv::cuda::cartToPolar(gpu_flow_xy[0], gpu_flow_xy[1], gpu_magnitude, gpu_angle, true);
// normalize magnitude from 0 to 1
cv::cuda::normalize(gpu_magnitude, gpu_normalized_magnitude, 0.0, 1.0, NORM_MINMAX, -1);
// get angle of optical flow
gpu_angle.download(angle);
angle *= ((1 / 360.0) * (180 / 255.0));
// build hsv image
gpu_hsv[0].upload(angle);
gpu_hsv[2] = gpu_normalized_magnitude;
cv::cuda::merge(gpu_hsv, 3, gpu_merged_hsv);
// multiply each pixel value to 255
gpu_merged_hsv.cv::cuda::GpuMat::convertTo(gpu_hsv_8u, CV_8U, 255.0);
// convert hsv to bgr
cv::cuda::cvtColor(gpu_hsv_8u, gpu_bgr, COLOR_HSV2BGR);
// send original frame from GPU back to CPU
gpu_frame.download(frame);
// send result from GPU back to CPU !!!!!!
gpu_bgr.download(bgr);
// update previous_frame value
gpu_previous = gpu_current;
可视化(不变)
// visualization
imshow("original", frame);
imshow("result", bgr);
int keyboard = waitKey(1);
if (keyboard == 27)
break;
CG
- opencv中文war3school


cuda下载




-
file:///C:/Program%20Files/NVIDIA%20GPU%20Computing%20Toolkit/CUDA/v10.2/doc/html/index.html
-
C:\ProgramData\NVIDIA Corporation\CUDA Samples\v10.2
-
安装完重启电脑

-
下载需要注册,我用qq邮箱注册了一个账号,才下载下来
cudnn
将bin、include、lib文件夹里的文件复制到CUDA安装路径C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v10.2 同名文件夹即可。
learnopencv
添加链接描述
https://github.com/spmallick/learnopencv/blob/master/README.md